

Localization for GNSS interference sources based on weighted K-Means combined with DRSS positioning
-
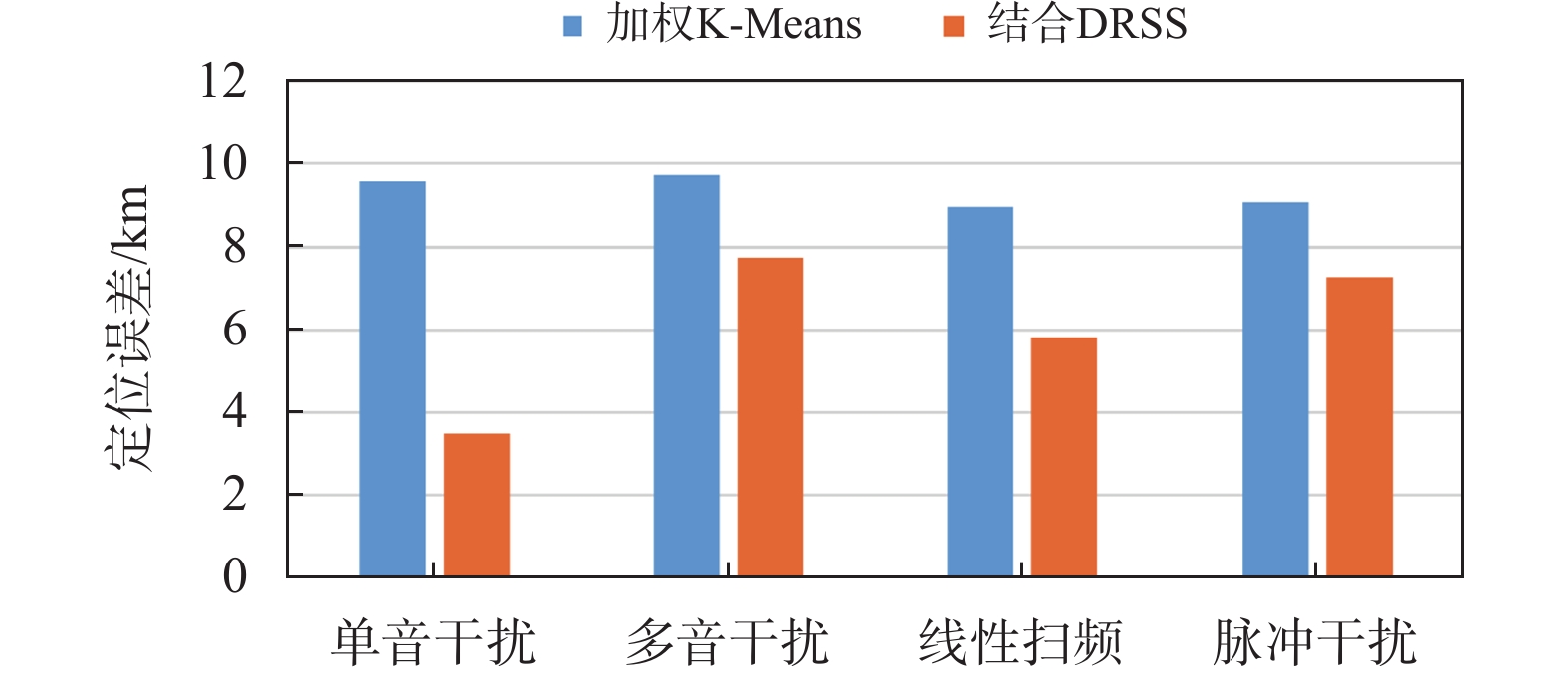
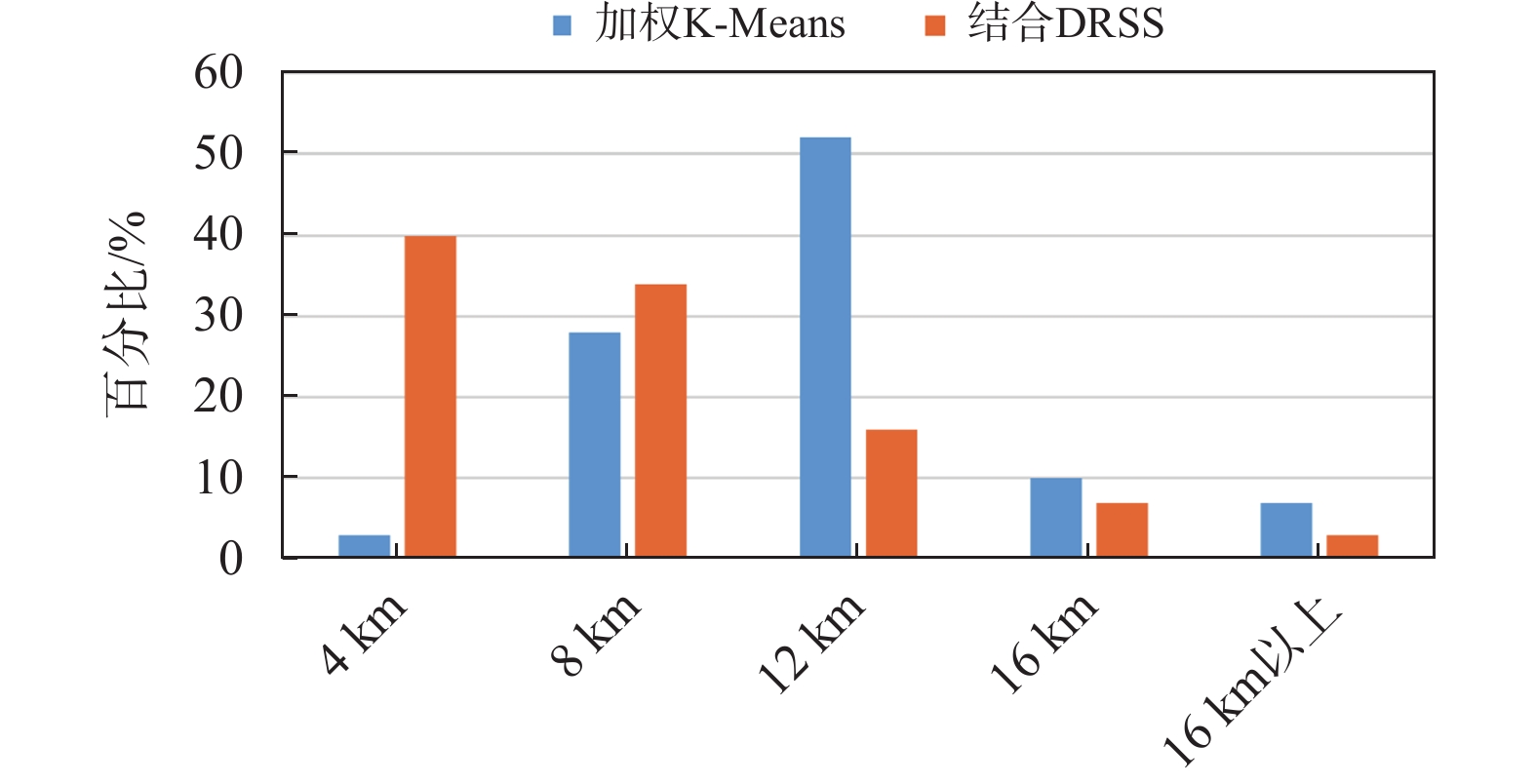
摘要: 针对基于载噪比(carrier to noise ratio,CNR)的GNSS干扰源定位,在存在多个干扰源、多径传输且接收机间距较远时定位难度大、精度低的问题,提出了一种加权K均值(K-Means)聚类算法与基于差分接收信号强度(differential received signal strength,DRSS)的方程解算定位相结合的多干扰源定位方法. 在假设干扰源个数确定以及单个接收机只受到一个干扰源影响的前提下,设计了改进的加权K-Means聚类算法实现对多个干扰源位置的初步估计. 为了进一步降低在观测接收机相距较远时加权K-Means方法的定位误差,在聚类后选取各簇内受干扰影响显著的接收CNR构建基于DRSS的定位方程组,通过方程解算得到更加精细的定位结果. 仿真结果表明,所提出的定位方案可以实现对多干扰源的定位,结合DRSS参数定位后,单干扰源场景下定位误差可降低19%以上,存在两个单音干扰源的场景下定位误差可降低38%以上.Abstract: The carrier to noise ratio (CNR) based interference positioning in Global Navigation Satellite System (GNSS) has the problem of high localization difficulty and the low localization precision under the scenarios with multiple interference sources, multi-path transmission and long distance between receivers. Aiming at this problem, a multi-interference localization scheme that combines the weighted K-Means clustering with different receiver signal strength (DRSS) and equation solving based method is proposed in this paper. Assuming that the number of interference sources is determined and a single receiver is only affected by one interference source, the improved weighted K-Means clustering algorithm is designed to realize the initial estimation for multiple interference sources. In order to reduce the positioning error of the weighted K-Means clustering when the distance between receives is long, the receiving CNR affected more obviously by interference within each cluster are used to build the localization equations based on DRSS after clustering processing. To solve the equations can obtain the more accurate localization results. Simulation results demonstrate that the proposed scheme can realize the multi-interference localization. Compared with the scheme only including weighted K-Means, the average positioning errors of the proposed method involving DRSS parameters can be reduced by more than 19% and 38% under the two cases of single source and two single-tone sources, respectively.
-
Key words:
- GNSS /
- interference sources localization /
- carrier noise power density rate /
- clustering /
- DRSS
-
表 1 4种压制式干扰信号的数学模型
干扰类型 信号模型 单音干扰(STI) $ I\left( t \right) = \sqrt {2P} \cos \left( {2{\text{π}}ft + \varphi } \right) $ 多音干扰(MTI) $ I\left( t \right) = \sqrt {2P} \displaystyle\sum\limits_{i = 1}^N {\cos \left( {2{\text{π}}{f_i}t + {\varphi _i}} \right)} $ 线性扫频干扰(LFMI) $ I\left( t \right) = \sqrt {2P} {\text{rect}}\left( {{t \mathord{\left/ {\vphantom {t T}} \right. } T}} \right){e^{j\left( {2{\text{π}}{f_0}t + {\text{π}}K{t^2} + \varphi } \right)}} $ 脉冲干扰(PI) $I\left( t \right) = \displaystyle\sum\limits_{i = 0}^{N - 1} {\sqrt {{P \mathord{\left/ {\vphantom {P \tau }} \right. } \tau }} } \left[ {u\left( {t - iT} \right) - u\left( {t - iT - \tau T} \right)} \right]$  下载: 导出CSV
下载: 导出CSV
表 2 求解式(16)的格网搜索步长设置
变量 最小值 最大值 步长 $ {x_J} $ (X–15) km (X+15) km 1 km $ {y_J} $ (Y–15) km (Y+15) km 1 km $ \alpha $ 1 2 0.02 注:(X,Y)为加权K-Means的初步定位坐标.
下载: 导出CSV
表 4 各场景下加权K-Means算法平均定位误差
场景 干扰类型 定位误差均值/km 单源 单音 9.59 多音 9.73 线性扫频 8.96 脉冲 9.06 双源 单音 9.85 多音 8.77 线性扫频 10.77 脉冲 10.78
下载: 导出CSV
-
[1] WESSON K D, GROSS J N, HUMPHREYS T E, et al. GNSS signal authentication via power and distortion monitoring[J]. IEEE transactions on aerospace electronic systems, 2018, 54(2): 739-754. DOI: 10.1109/TAES.2017.2765258 [2] SHAFIEE E, MOSAVI M R, MOAZEDI M. Detection of spoofing attack using machine learning based on multi-layer neural network in single-frequency GPS receivers[J]. Journal of navigation, 2018, 71(1): 169-188. DOI: 10.1017/s0373463317000558 [3] WU Z, ZHAO Y, YIN Z, et al. Jamming signals classification using convolutional neural network [C]//IEEE International Symposium on Signal Processing and Information Technology, 2017. [4] JAHROMI A J, BROUMANDAN A, NIELSEN J, et al. GPS spoofer countermeasure effectiveness based on signal strength, noise power, and C/N0 measurements[J]. International journal of satellite communications and networking, 2012, 30(4): 181-191. DOI: 10.1002/sat.1012 [5] GAO P, SUN S L, ZENG Z , et al. GNSS spoofing jamming recognition based on machine learning[C]//The 3rd international conference on signal and information processing, networking and computers (ICSINC), 2017. [6] 邓旭. 基于载噪比的GNSS欺骗式干扰检测方法研究 [D]. 郑州: 战略支援部队信息工程大学, 2022. [7] 靳睿敏, 甄卫民. 基于接收机位置信息的GNSS干扰源定位技术[J]. 全球定位系统, 2020, 45(1): 51-55. [8] 聂大惟, 朱海, 吴飞, 等. 基于RSSI概率分布与贝叶斯估计的加权定位方法[J]. 全球定位系统, 2022, 47(2): 52-59. DOI: 10.12265/j/gnss.2021080902 [9] 刘禹秾. 基于终端聚类的导航信号干扰定位 [D]. 北京: 北京邮电大学, 2021. [10] PSIAKI M L, AKOS D M, THOR J. A comparison of direct RF sampling and down-convert & sampling GNSS receiver architectures[C]//The 16th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS/GNSS 2003), 2003: 1941-1952. [11] SHARAWI M S, AKOS D M, ALOI D N. GPS C/N0 estimation in the presence of interference and limited quantization levels[J]. IEEE transactions on aerospace and electronic systems, 2007, 43(1): 227-238. DOI: 10.1109/TAES.2007.357129 [12] PAULUZZI D, BEAULIEU N. A comparison of SNR estimation techniques for the AWGN channel[J]. IEEE transactions on communications, 2000, 48(10): 1681-1691. DOI: 10.1109/26.871393 [13] 朱海, 史文森, 蔡鹏, 等. 压制式干扰环境中GPS信号的载噪比估计算法[J]. 弹箭与制导学报, 2014, 34(3): 209-212. DOI: 10.3969/j.issn.1673-9728.2014.03.054 [14] LIU R, YANG Z W, CHEN Q, et al. GNSS multi-interference source centroid location based on clustering centroid convergence [J]. IEEE access, 2021(9): 108452-108465. DOI: 10.1109/ACCESS.2021.3101250 [15] 刘睿, 杨志伟, 陈奇东, 等. 基于信号传播修正的GNSS干扰源质心定位方法[J]. 系统工程与电子技术, 2021, 43(8): 2083-2089. DOI: 10.12305/j.issn.1001-506X.2021.08.08 -


 点击查看大图
点击查看大图

图(7) / 表(5)
计量
- 文章访问数: 94
- HTML全文浏览量: 35
- PDF下载量: 9
- 被引次数: 0
