

Improved MixNet for indoor localization using CSI image fingerprints
-
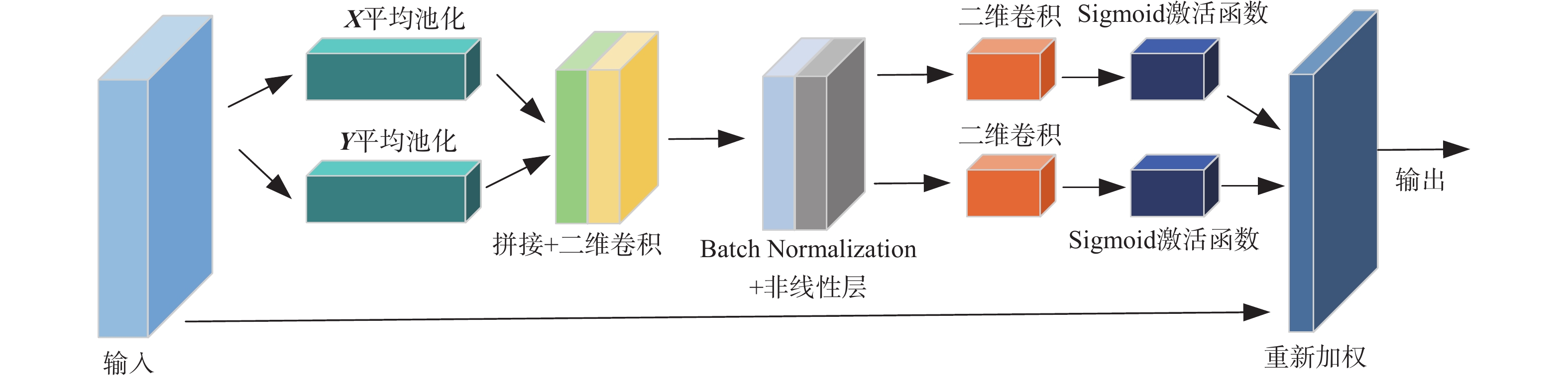
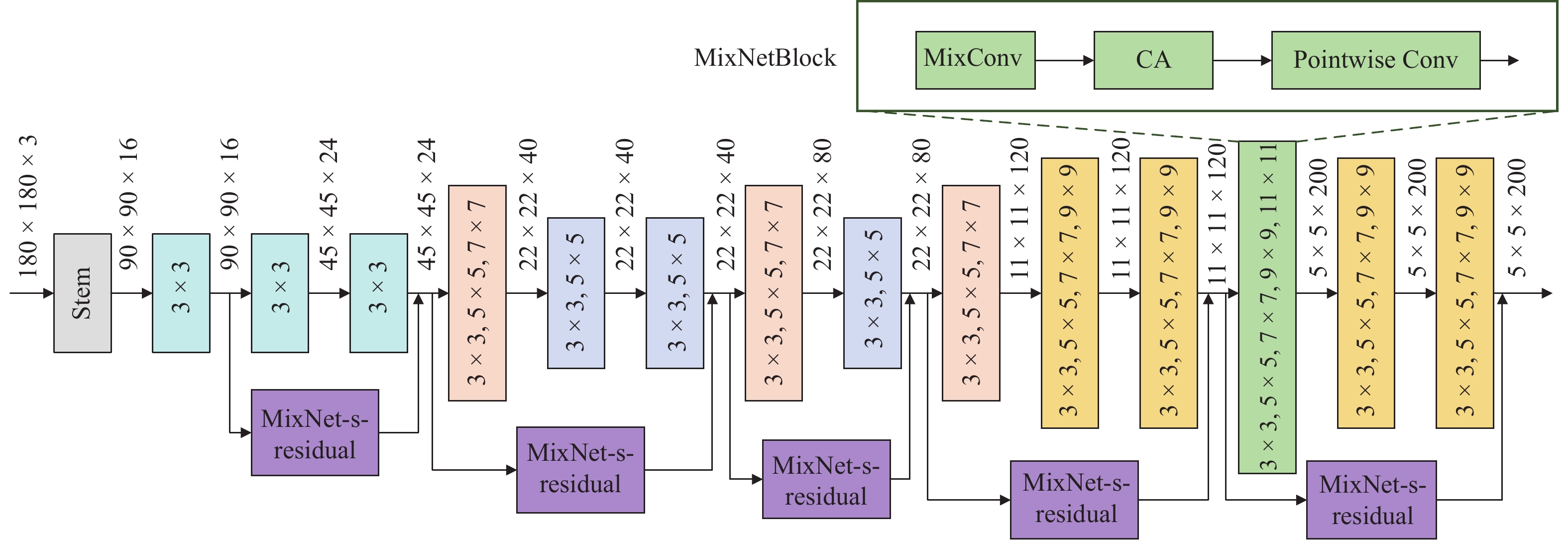
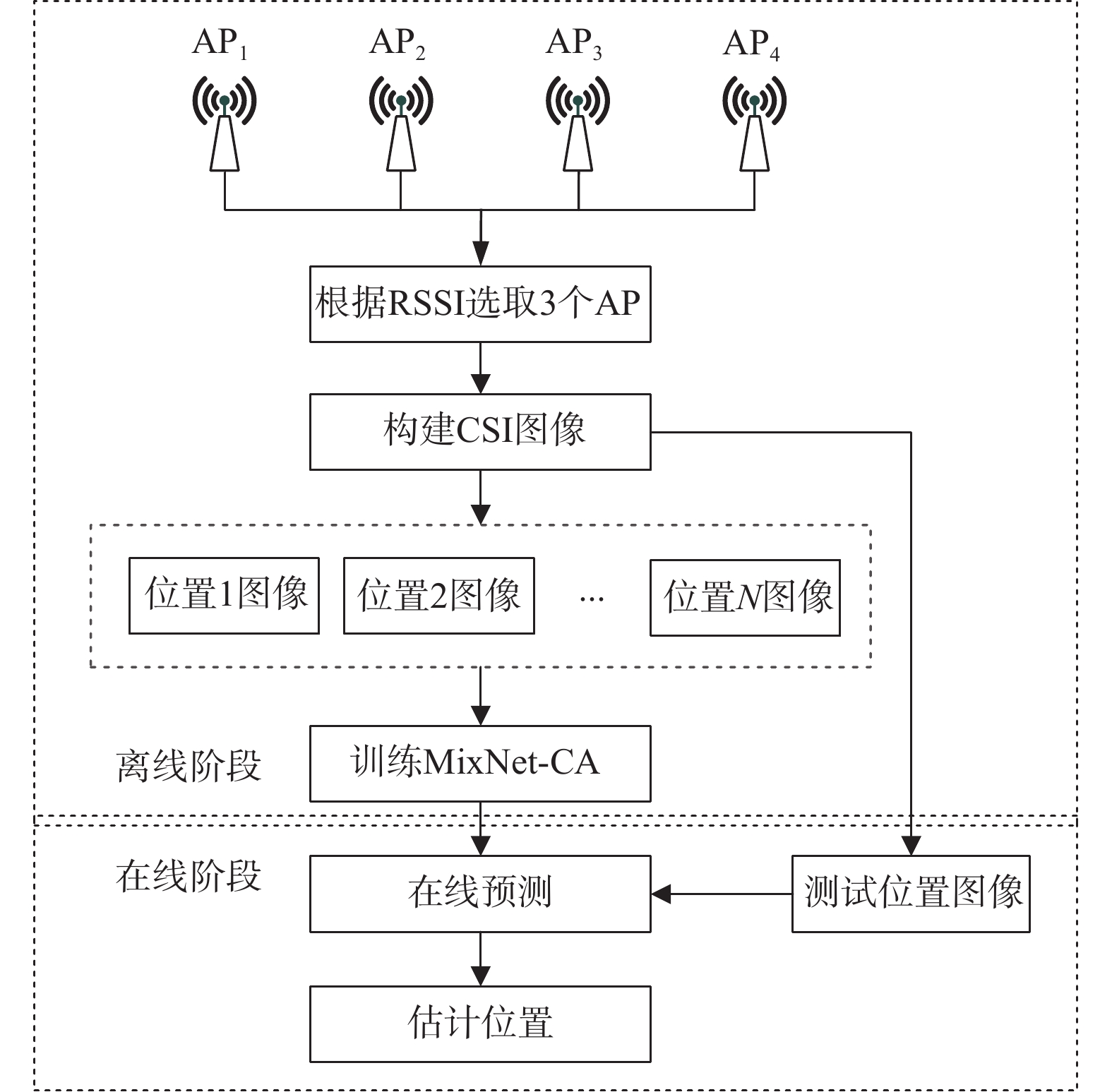
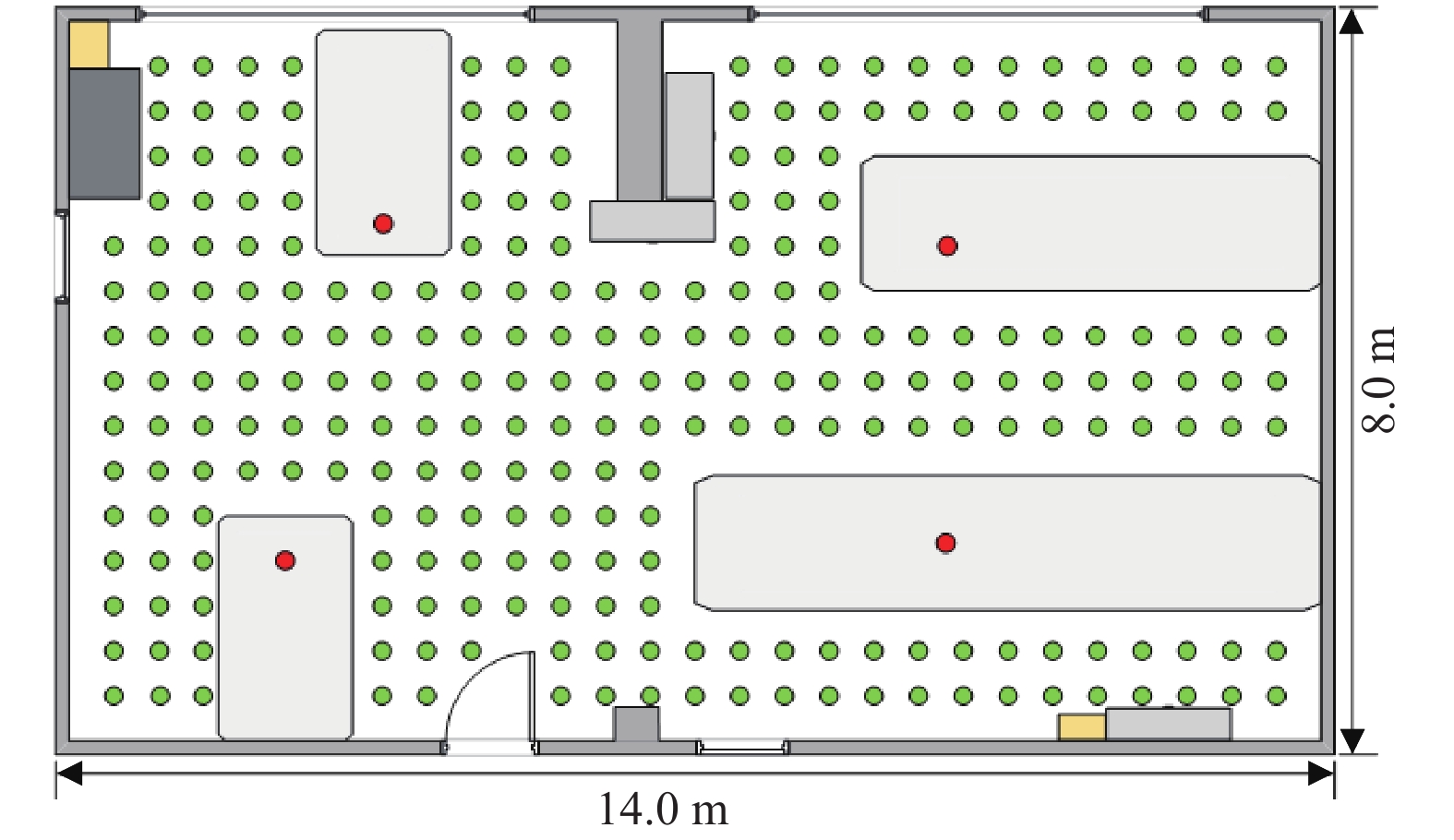
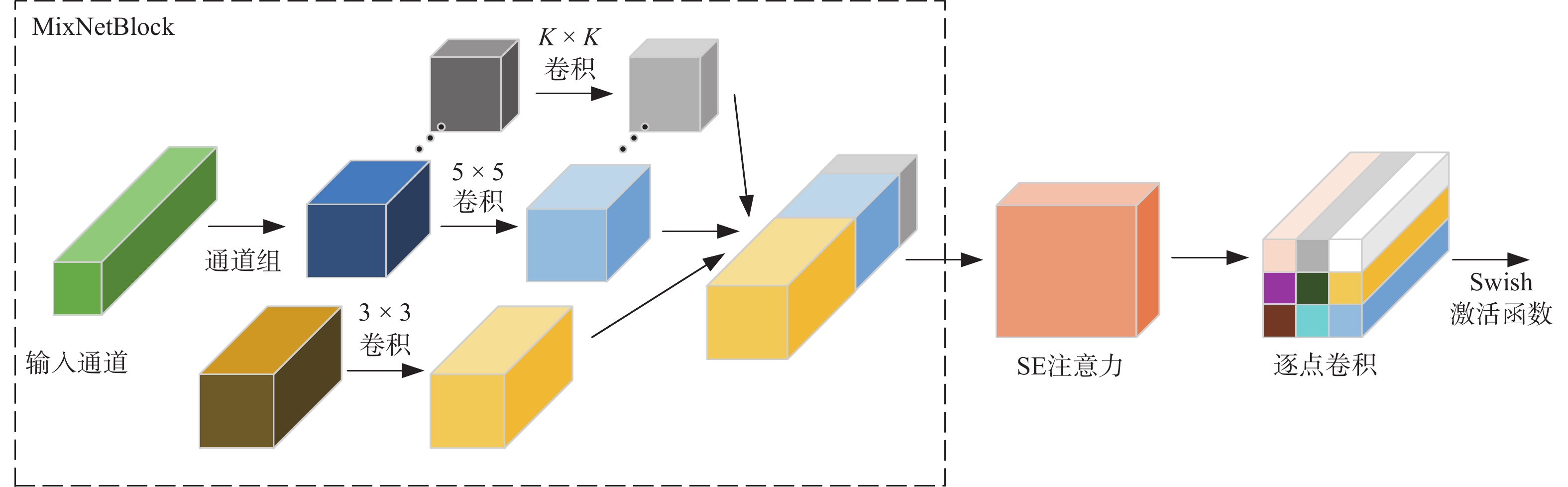
摘要: 为了提升信道状态信息(channel state information, CSI)指纹室内定位的性能,提出了一种改进MixNet的CSI图像指纹室内定位方法. 在离线阶段,通过选择定位参考点(reference point, RP)处信号强度指示(received signal strength indication, RSSI)最强的3个接入点(access point, AP),提取其CSI数据并转换为图像;然后利用改进的MixNet模型对图像进行训练并保存模型. 其中改进的MixNet引入了坐标注意力(coordinate attention, CA)和残差连接. 首先,将MixNet-s中的SE (squeeze-and-excitation)注意力替换为CA,以增强网络的信息表示能力并更精确地获取CSI图像指纹特征. 其次,根据MixNet-s模型的特点构建残差连接,以增强网络的表示能力并防止过拟合. 最后,通过减小网络深度确保所有网络层得到充分训练;在线阶段,采集目标设备的CSI数据并转换为图像,输入已训练好的改进MixNet模型(命名为MixNet-CA);最后利用加权质心算法根据模型输出的概率值估计目标设备的最终位置. 提出方法在室内环境中进行了验证,达到了0.3620 m的平均定位误差.
-
关键词:
- MixNet /
- 坐标注意力 /
- Wi-Fi指纹室内定位 /
- 信道状态信息图像 /
- 残差连接
Abstract: To enhance the performance of indoor localization using channel state information (CSI) fingerprints, an CSI image-based indoor localization method based on the improved MixNet model is proposed. In the offline phase, the method involves selecting the three access points (APs) with the highest received signal strength indication (RSSI) at the reference point (RP), extracting their CSI data, and converting it into image. Subsequently, the improved MixNet model is employed to train on these images and save the model. The improved MixNet model introduces coordinate attention (CA) and residual connections. Specifically, it replaces the squeeze-and-excitation (SE) attention in MixNet-s with CA to enhance the network’s information representation capability and extract CSI image fingerprint features more accurately. Moreover, it incorporates residual connections, tailored to the characteristics of the MixNet-s model, to enhance the network’s representation capacity and prevent overfitting. Finally, the network depth is reduced to ensure that all network layers are adequately trained. During the online phase, CSI data from the target device is collected and converted into image, and then input into the pre-trained improved MixNet model (named MixNet-CA). The final device position is estimated using a weighted centroid algorithm based on the model's output probabilities. The proposed method is validated in an indoor environment and achieve an average positioning error of 0.362 0 m.-
Key words:
- MixNet /
- coordinate attention /
- Wi-Fi fingerprint indoor positioning /
- CSI image /
- residual connections
-
表 1 MixNet-s的主要参数
t c n k s a se 1 14 1 [3] 1 ReLU None 6 24 1 [3] 2 ReLU None 3 24 1 [3] 1 ReLU None 6 40 1 [3 5 7] 2 Swish 0.5 6 40 3 [3 5] 1 Swish 0.5 6 80 1 [3 5 7] 2 Swish 0.25 6 80 2 [3 5] 1 Swish 0.25 6 120 1 [3 5 7] 1 Swish 0.5 3 120 2 [3 5 7 9] 1 Swish 0.5 6 200 1 [3 5 7 9 11] 2 Swish 0.5 注:t=扩展比率,c=输出通道,n=组数,k=MixConv卷积核分布,s=步幅,a=激活函数,se=SE权重.  下载: 导出CSV
下载: 导出CSV
表 2 不同定位方法的性能比较
方法 平均误差/m 标准差/m 执行时间/s 提出方法 0.362 0 0.217 8 0.35 CiFi 1.109 0 0.541 1 0.64 CNNFi 0.537 7 0.307 4 0.52 ShuffleNetV2Fi 0.887 3 0.430 6 0.48
下载: 导出CSV
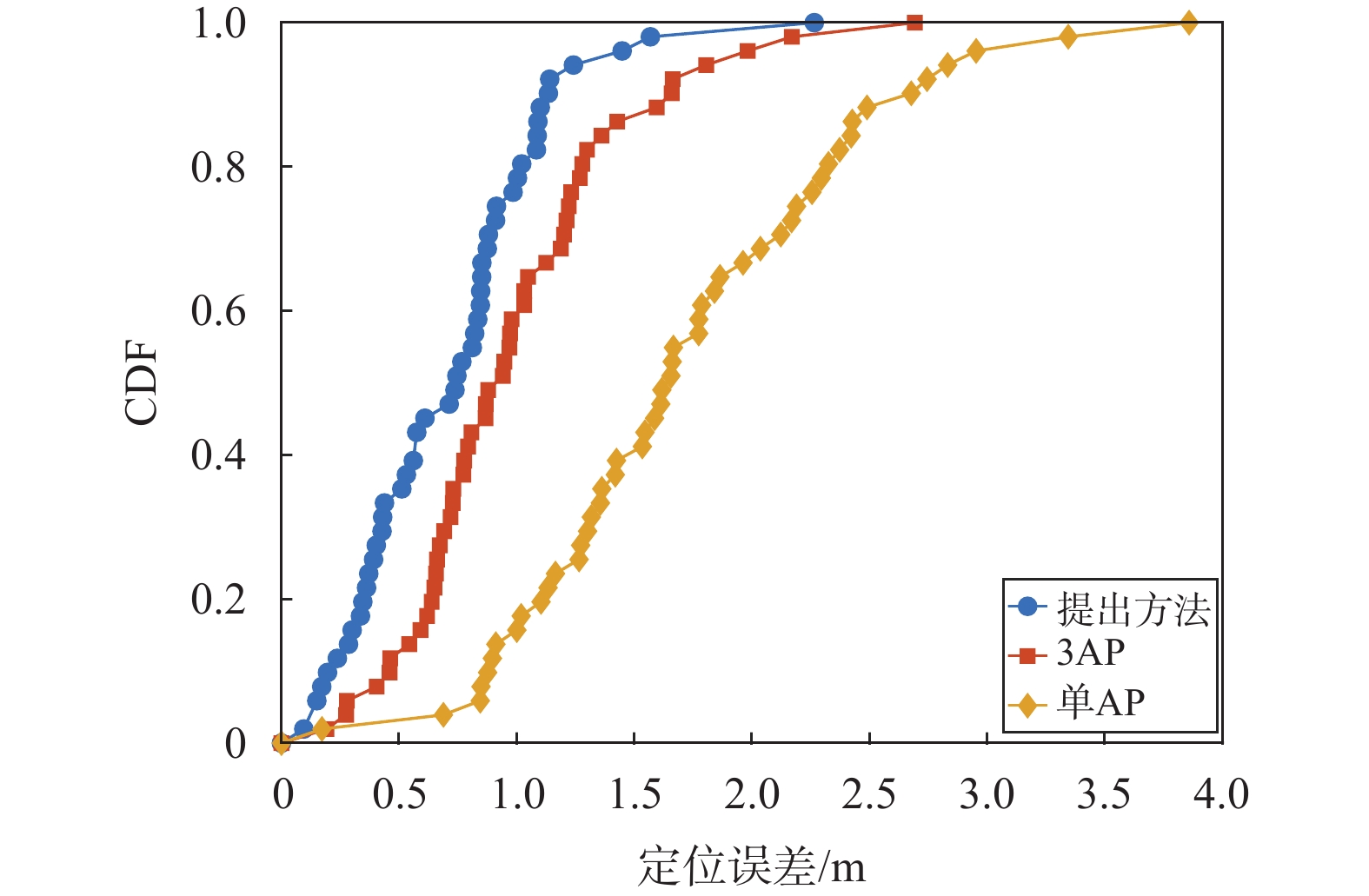
表 3 不同AP数量的性能比较
方法 平均误差/m 标准差/m 执行时间/s 提出方法 0.362 0 0.217 8 0.35 3AP 0.423 4 0.323 7 0.35 单AP 0.559 3 0.389 5 0.29
下载: 导出CSV
-
[1] 王志恒, 徐彦彦. 室内定位隐私保护综述[J]. 通信学报, 2023, 44(9): 188-204. [2] XU S H, CHEN R Z, GUO G Y, et al. Bluetooth, floor-plan, and microelectromechanical systems-assisted wide-area audio indoor localization system: apply to smartphones[J]. IEEE transactions on industrial electronics, 2021, 69(11): 11744-11754. DOI: 10.1109/TIE.2021.3111561 [3] 李玉柏, 孙迅. 基于迁移学习提高WiFi室内定位中信道状态信息指纹库的鲁棒性[J]. 电子与信息学报, 2023, 45(10): 3657-3666. [4] 牟平, 凌铭, 胡锐. 基于改进AP选择的融合随机森林室内定位算法[J]. 全球定位系统, 2021, 46(5): 33-38. [5] 杨小龙, 李欣玥, 周牧, 等. 基于多维模糊映射AP优化的WLAN室内定位方法[J]. 电子学报, 2022, 50(8): 1875-1884. [6] 俞佳豪, 余敏. 一种基于智能手机四向RSS指纹的室内定位方法[J]. 全球定位系统, 2021, 46(5): 48-54. [7] 赵增华, 童跃凡, 崔佳洋. 基于域自适应的Wi-Fi指纹设备无关室内定位模型[J]. 通信学报, 2022, 43(4): 143-153. [8] CHEN H, ZHANG Y F, LI W, et al. ConFi: Convolutional neural networks based indoor Wi-Fi localization using channel state information[J]. IEEE access, 2017(5): 18066-18074. DOI: 10.1109/ACCESS.2017.2749516 [9] ZHU X Q, QU W Y, ZHOU X B, et al. Intelligent fingerprint-based localization scheme using CSI images for internet of things[J]. IEEE transactions on network science and engineering, 2022, 9(4): 2378-2391. DOI: 10.1109/TNSE.2022.3163358 [10] WANG X Y, WANG X Y, MAO S W. Deep convolutional neural networks for indoor localization with CSI images[J]. IEEE transactions on network science and engineering, 2018, 7(1): 316-327. DOI: 10.1109/TNSE.2018.2871165 [11] LI S H, ZENG X S, LI Y Z, et al. Convolutional neural networks based indoor Wi-Fi localization with a novel kind of CSI images[J]. China communications, 2019, 16(9): 250-260. DOI: 10.23919/JCC.2019.09.019 [12] 刘帅, 王旭东, 吴楠. 一种基于卷积神经网络的CSI指纹室内定位方法[J]. 工程科学学报, 2021, 43(11): 1512-1521. [13] ZHANG F, WANG G C. Multi-branch selection fusion fine-grained classification algorithm based on coordinate attention localization[C]//2022 IEEE 34th International Conference on Tools with Artificial Intelligence (ICTAI), 2022: 105-111. DOI: 10.1109/ICTAI56018.2022.00024 [14] 王子辰, 陈晓艳, 王倩, 等. 基于残差自注意力连接的深度电学层析成像方法[J]. 仪器仪表学报, 2023, 44(5): 288-301. [15] TAN M X, LE Q V. Mixconv: mixed depthwise convolutional kernels[J]. arXiv preprint, 2019: 1-11. DOI: 10.48550/arXiv.1907.09595 [16] CHENG S L, WANG L J, DU A Y. Asymmetric coordinate attention spectral-spatial feature fusion network for hyperspectral image classification[J]. Scientific reports, 2021, 11(1): 17408. DOI: 10.1038/s41598-021-97029-5 -




 点击查看大图
点击查看大图
图(11) / 表(3)
计量
- 文章访问数: 132
- HTML全文浏览量: 46
- PDF下载量: 11
- 被引次数: 0
