

Fractional cycle bias estimation and ambiguity resolution for Galileo triple-frequency uncombined PPP
-
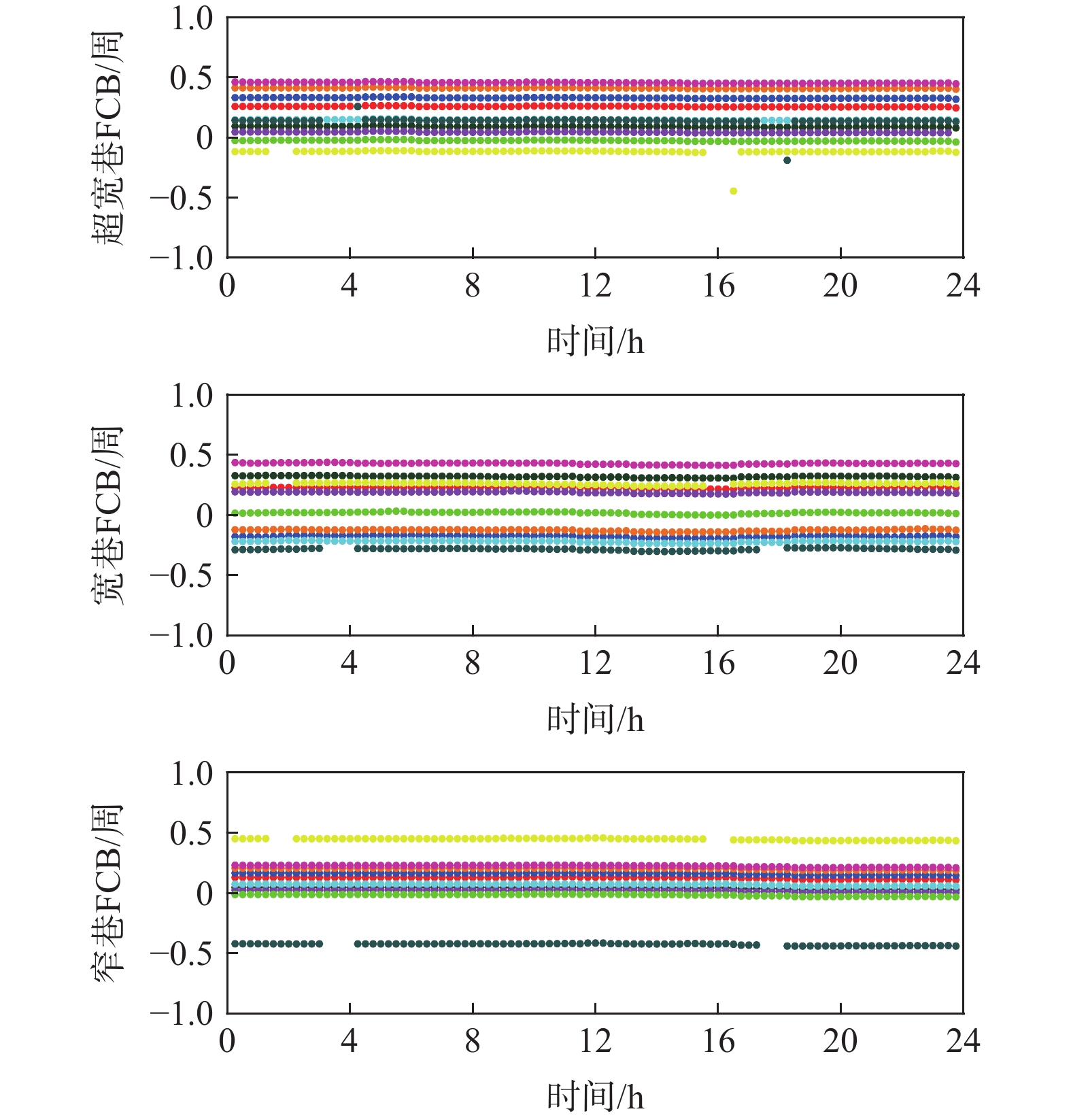
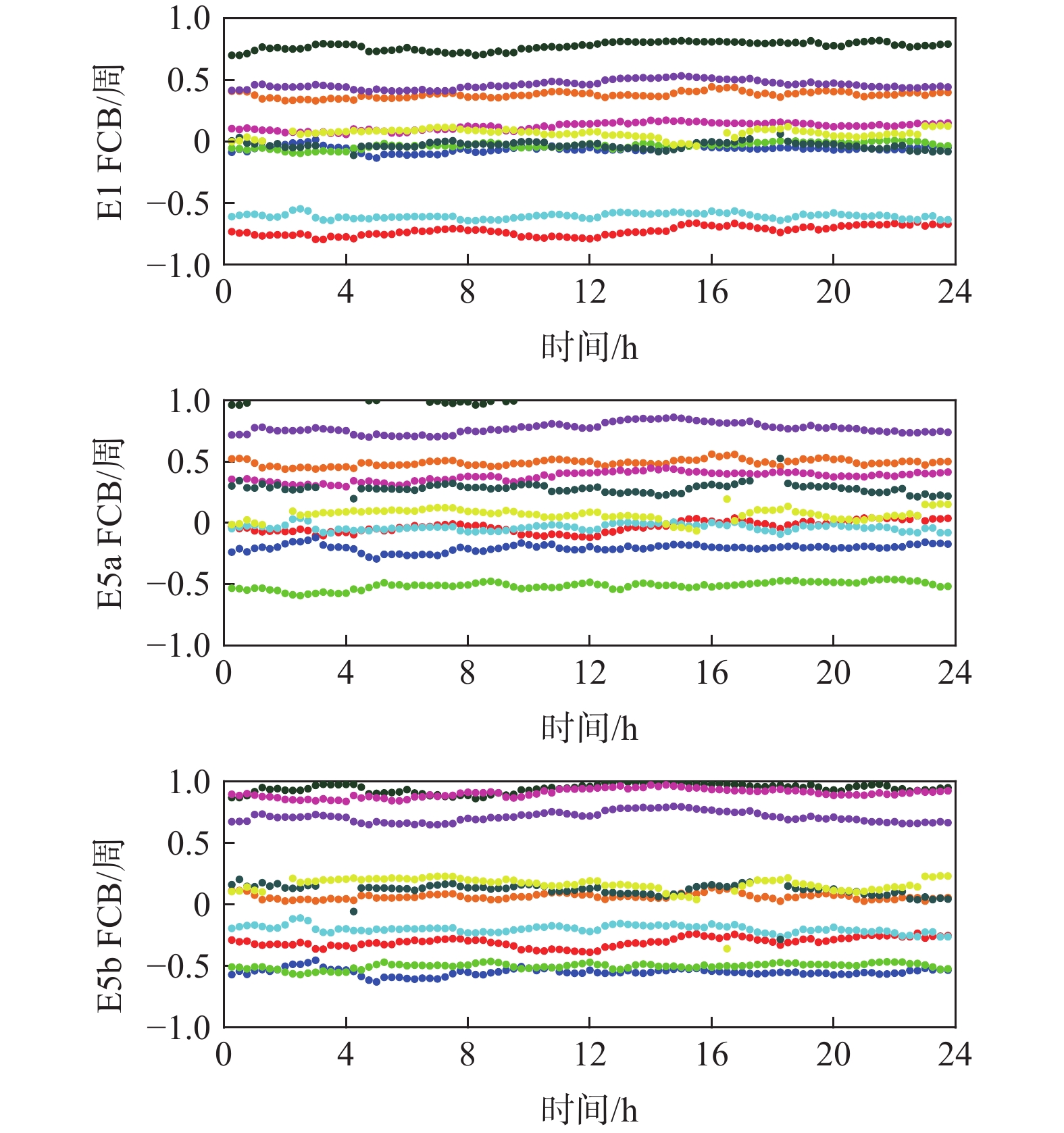
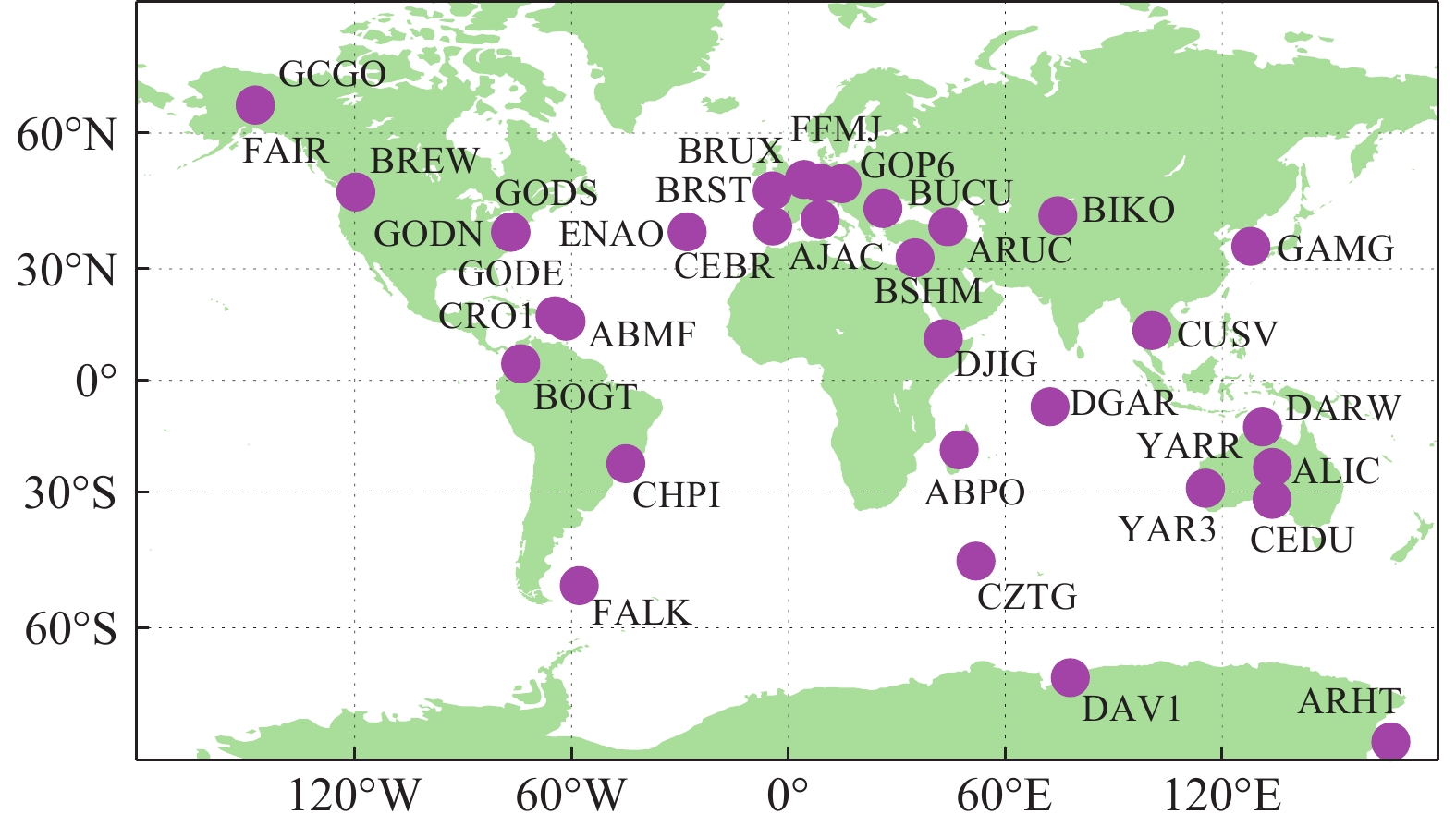
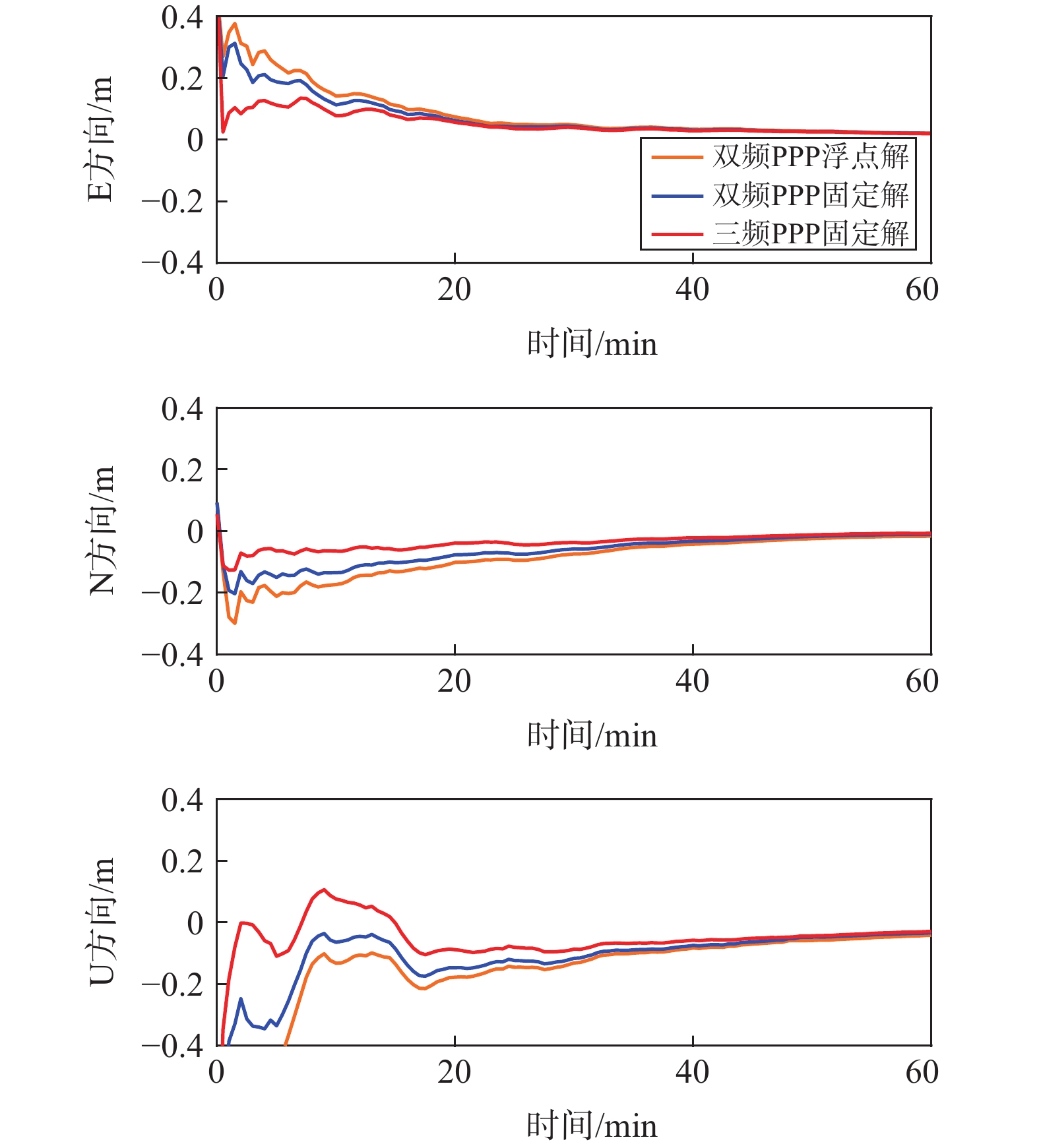
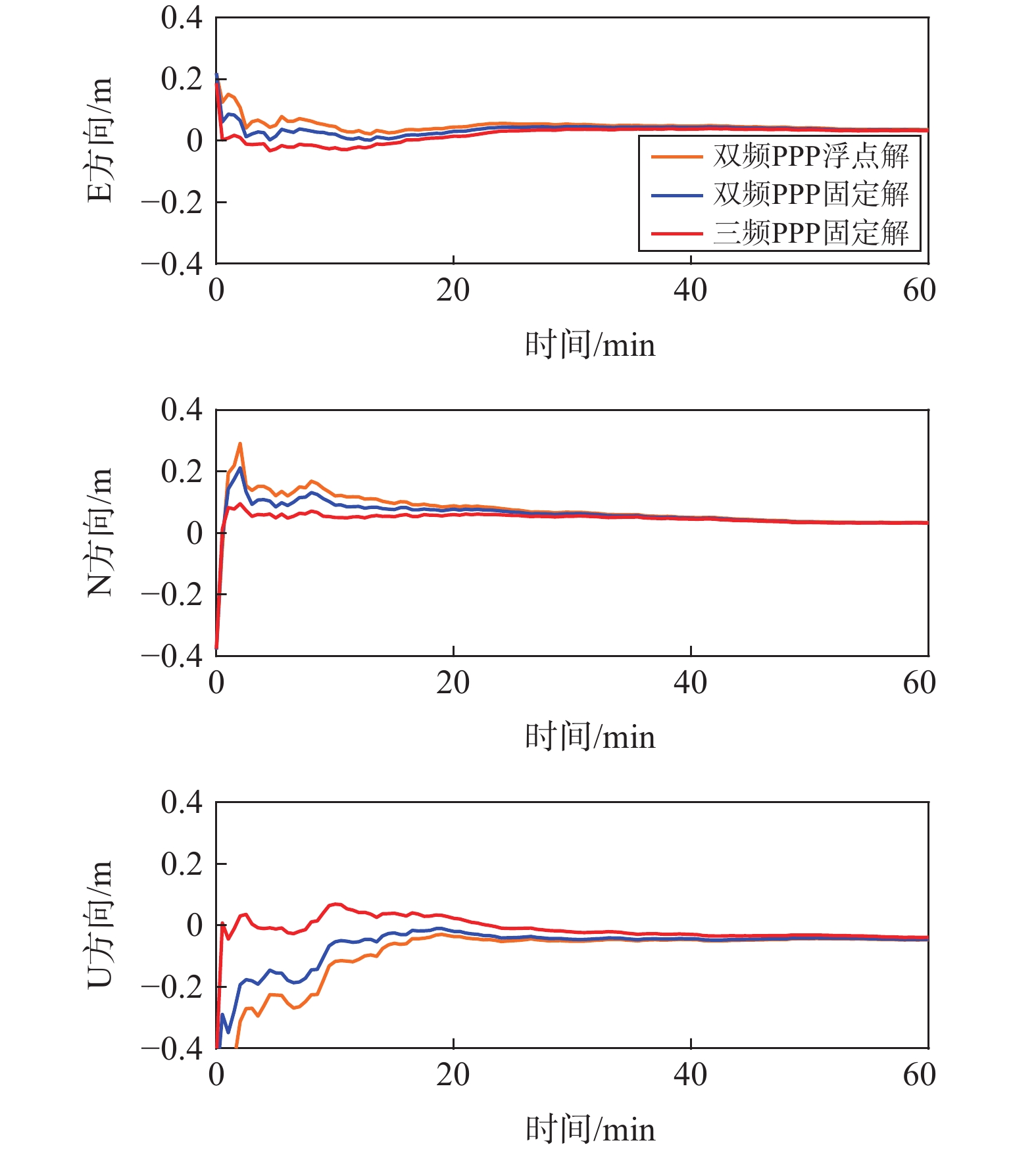
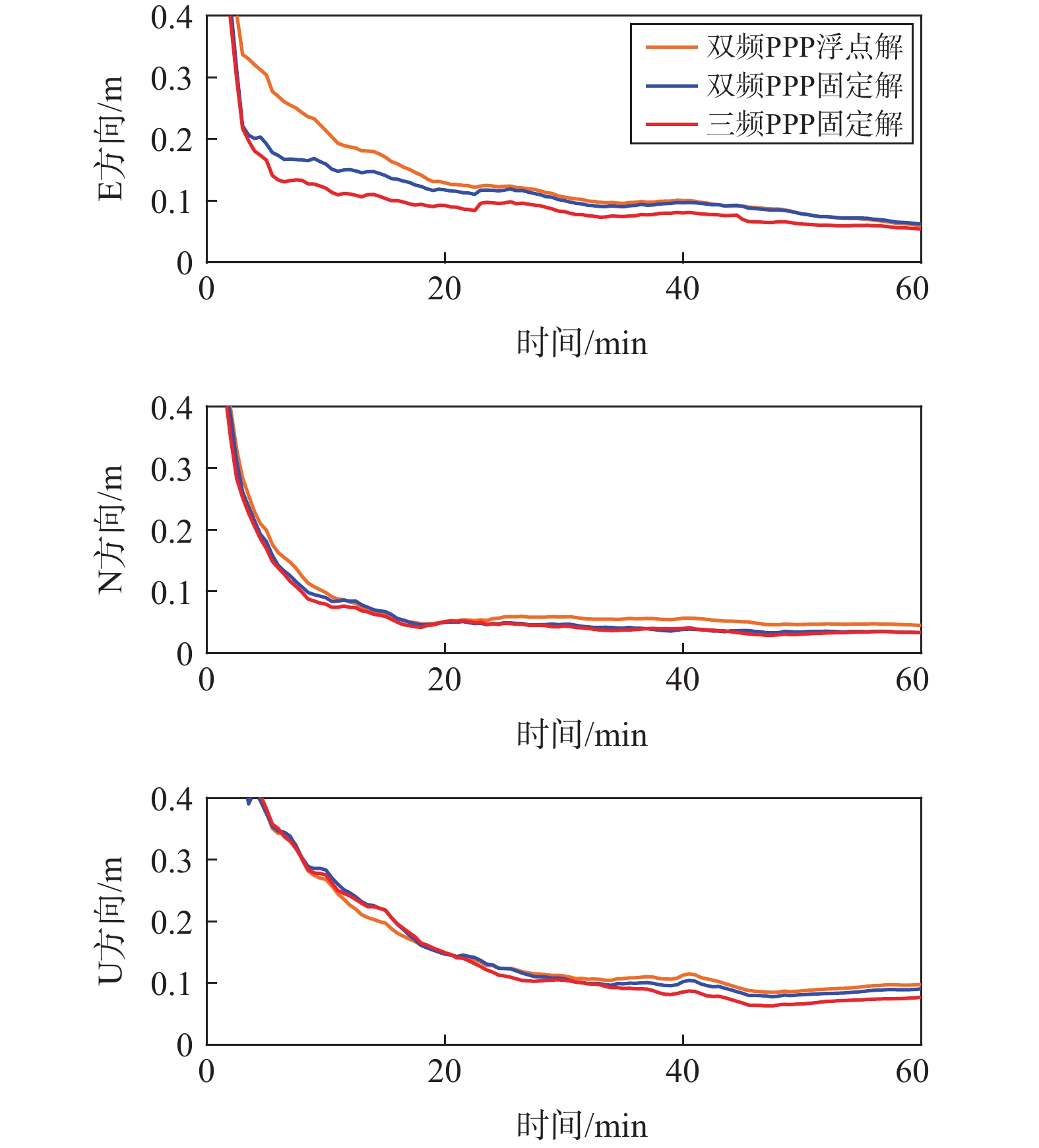
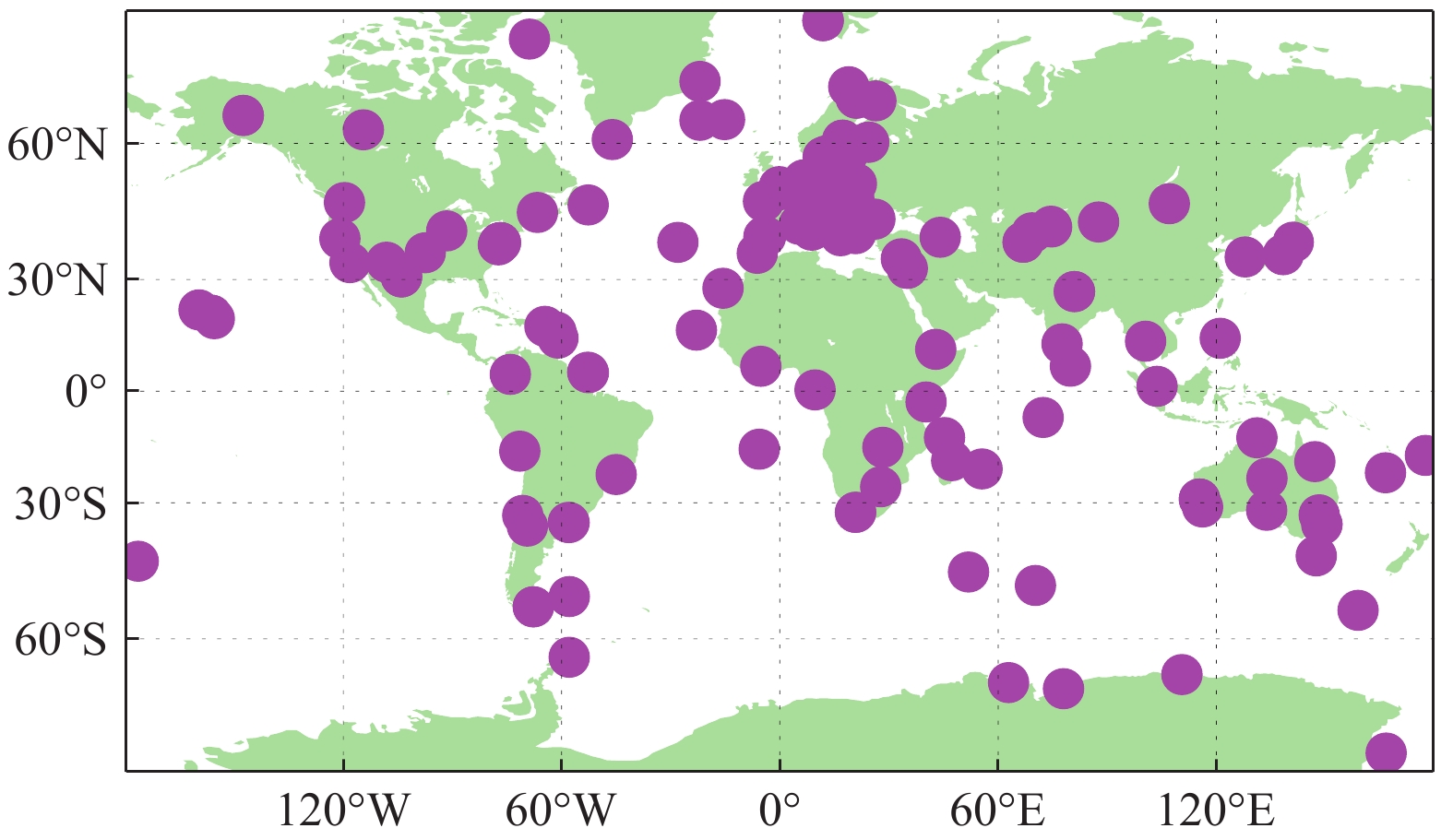
摘要: 欧洲的Galileo目前已经有28颗在轨可用卫星,具备全球精密定位能力,并且所有卫星均能够播发多频信号,多频信号融合有望进一步改善精密单点定位(precise point positioning,PPP)模糊度固定解性能. 本文研究了Galileo三频非组合PPP相位小数偏差(fractional cycle bias,FCB)估计与模糊度解算(ambiguity resolution,AR)方法,并将其结果同双频非组合PPP模糊度固定解与浮点解结果进行了对比分析. 结果表明:利用155个全球分布的地面跟踪站数据进行FCB估计,单个频率上的FCB估值序列标准差(standard deviation,STD)优于0.04周;双频PPP浮点解在E、N、U方向收敛时间分别为32.0 min、10.0 min、43.5 min,双频PPP固定解收敛时间分别减少到30.5 min、8.5 min、32.0 min,三频PPP固定解收敛时间分别进一步缩短到16.5 min、8.0 min、32.0 min.
-
关键词:
- 相位小数偏差(FCB) /
- 模糊度解算(AR) /
- 精密单点定位(PPP) /
- 三频信号 /
- Galileo
Abstract: Galileo already has 28 in-orbit satellites, with precise positioning capabilities on a global scale. All Galileo satellites are capable of broadcasting multi-frequency signals, and multi-frequency integration is expected to further improve the performance of precise point positioning (PPP) ambiguity-fixed solutions. In this paper, the fractional cycle bias (FCB) estimation method and ambiguity resolution (AR) method for Galileo triple-frequency uncombined (UC) PPP are developed, and the derived results are compared with those of dual-frequency UC PPP ambiguity-fixed and ambiguity-float solutions. The results indicate that the standard deviation (STD) of UC FCB series on a single frequency is better than 0.04 cycles using datasets from 155 globally distributed ground tracking stations. The convergence time of Galileo dual-frequency PPP float solutions in the east, north and up directions is 32.0 min, 10.0 min and 43.5 min, respectively, and the corresponding statistic of dual-frequency PPP fixed solutions is reduced to 30.5 min, 8.5 min and 32.0 min in the three directions, respectively. The convergence time of triple-frequency PPP fixed solutions is further shortened to 16.5 min, 8.0 min and 32.0 min in the three directions, respectively. -
[1] ZUMBERGE J F, HEFLIN M B, JEFFERSON D C, et al. Precise point positioning for the efficient and robust analysis of GPS data from large networks[J]. Journal of geophysical research: solid earth, 1997, 102(B3): 5005-5017. DOI: 10.1029/96JB03860 [2] HÉROUX P, KOUBA J. GPS precise point positioning using IGS orbit products[J]. Physics and chemistry of the earth, part A: solid earth and geodesy, 2001, 26(6-8): 573-578. DOI: 10.1016/S1464-1895(01)00103-X [3] GABOR M J, NEREM R S. GPS carrier phase ambiguity resolution using satellite-satellite single differences[C]// The 12th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 1999), 1999: 1569-1578. [4] GE M, GENDT G, ROTHACHER M, et al. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations[J]. Journal of geodesy, 2008, 82(7): 389-399. DOI: 10.1007/s00190-007-0187-4 [5] LAURICHESSE D, MERCIER F, BERTHIAS J-P, et al. Integer ambiguity resolution on undifferenced GPS phase measurements and its application to PPP[C]//The 20th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2007), 2007: 839-848. DOI: 10.1002/j.2161-4296.2009.tb01750.x [6] COLLINS P, BISNATH S, LAHAYE F, et al. Undifferenced GPS ambiguity resolution using the decoupled clock model and ambiguity datum fixing[J]. Navigation-journal of the institute of navigation, 2010, 57(2): 123-135. DOI: 10.1002/j.2161-4296.2010.tb01772.x [7] HENKEL P, GUNTHER C. Precise point positioning with multiple Galileo frequencies[C]//2008 IEEE/ION Position, Location and Navigation Symposium, 2008. DOI: 10.1109/PLANS.2008.4570102 [8] DEO M, EL-MOWAFY A. Triple-frequency GNSS models for PPP with float ambiguity estimation: performance comparison using GPS[J]. Survey review, 2016, 50(360): 249-261. DOI: 10.1080/00396265.2016.1263179 [9] GE Y L, CAO X Y, SHEN F, et al. BDS-3/Galileo time and frequency transfer with quad-frequency precise point positioning[J]. Remote sensing, 2021, 13(14): 2704. DOI: 10.3390/rs13142704 [10] GENG J, BOCK Y. Triple-frequency GPS precise point positioning with rapid ambiguity resolution[J]. Journal of geodesy, 2013, 87(5): 449-460. DOI: 10.1007/s00190-013-0619-2 [11] GU S F, LOU Y D, SHI C, et al. BeiDou phase bias estimation and its application in precise point positioning with triple-frequency observable[J]. Journal of geodesy, 2015, 89(10): 979-992. DOI: 10.1007/s00190-015-0827-z [12] LI X X, LI X, LIU G G, et al. Triple-frequency PPP ambiguity resolution with multi-constellation GNSS: BDS and Galileo[J]. Journal of geodesy, 2019, 93(8): 1105-1122. DOI: 10.1007/s00190-019-01229-x [13] LI P, ZHANG X H. Precise point positioning with partial ambiguity fixing[J]. Sensors, 2015, 15(6): 13627-13643. DOI: 10.3390/s150613627 -

 下载:
下载:
 点击查看大图
点击查看大图
图(7)
计量
- 文章访问数: 89
- HTML全文浏览量: 49
- PDF下载量: 27
- 被引次数: 0
