

Basic and technical system of electrostatic field positioning and navigation
-
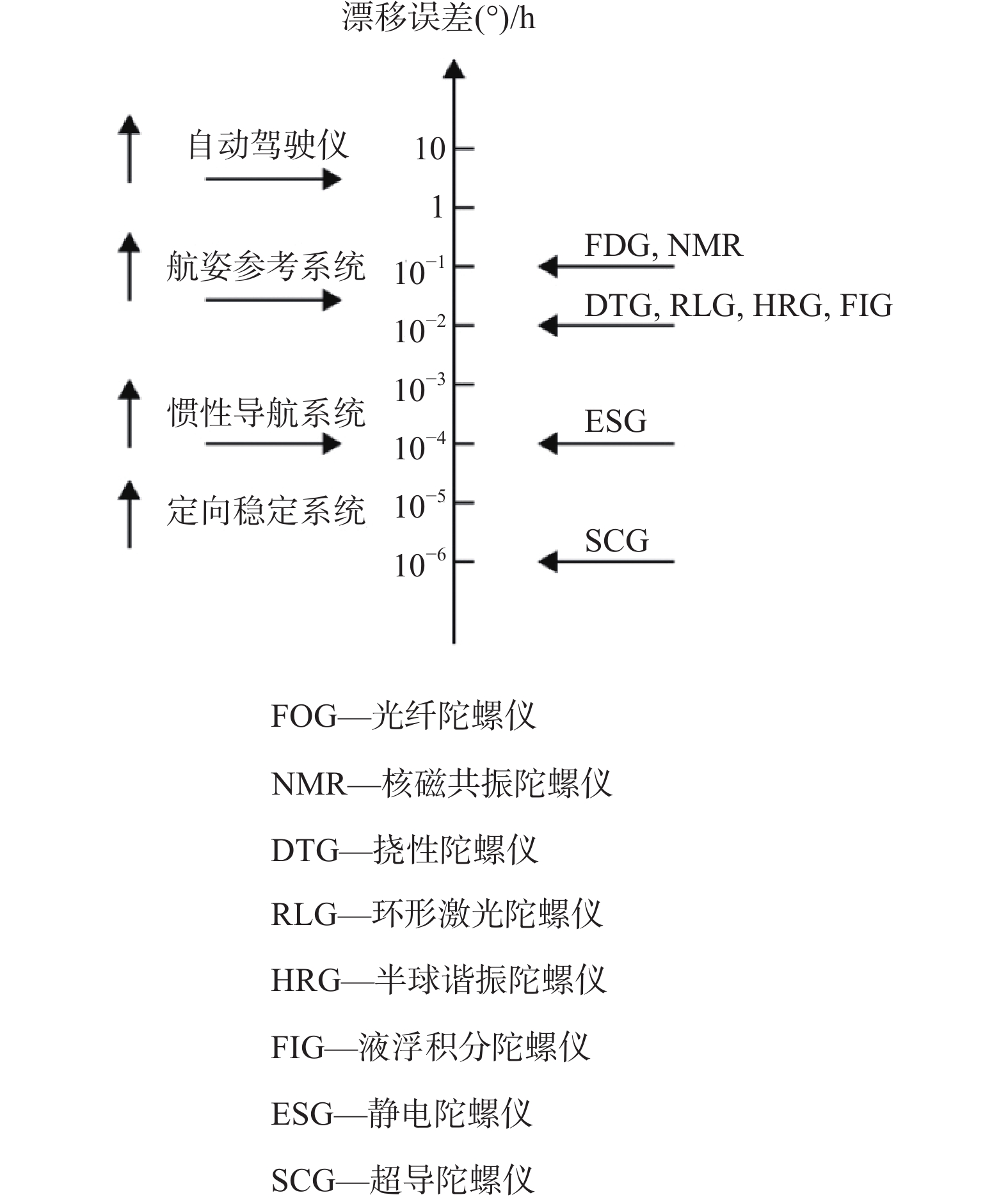
摘要: 从上世纪50年代起,惯性技术逐步在导航领域占据主导地位,在80年代开始的组合导航系统中,惯性技术仍占主导地位,但惯性导航技术一直受到设置初始值和随时间精度下降的困扰,且价格昂贵. 本文首先对静电陀螺及其支承原理进行阐述,处于高度真空的球形电极碗中的球形转子与碗电极之间的间隙很小,在电极与球形转子之间加上支承高压,形成强电场,当球形转子受到的静电力平衡时,球形转子就被支承起来. 又通过对静电场支承系统(electrostatic suspension system,ESS)转子位移测量电路误差进的定量分析和单项测试,阐述电路各元件在总漂移误差中的分离方法和结果. 在此基础上,归纳了提高精度指标的方法与途径,研制了全屏蔽、模块化结构电路,并装入了陀螺本体.Abstract: Since the 1950s, inertial technology has gradually occupied a dominant position in the field of navigation. In the integrated navigation system since the 1980s, inertial technology is still dominant. However, inertial navigation technology has been troubled by setting initial values and decreasing accuracy over time, and its price is high. The gap between the spherical rotor and the bowl electrode is very small. The supporting high pressure is added between the electrode and the rotor to form a strong electric field between the electrode and the spherical rotor. When the electrostatic force of the spherical rotor is balanced, the spherical rotor will be supported. Through the quantitative analysis and single test of ESS rotor displacement measurement circuit error, the separation method and results of each component in the total drift error are described. On this basis, the methods and ways to improve the precision index are summarized. The fully shielded and modular circuit is developed and loaded into the gyroscope body.
-
表 1 高频加力元件铁芯选取
种类号 出产国 材料 型号 μi(4π×10−7 H/m) Bs/T Br/T Hc/(A·m−1) 体积/mm3 适应频率 I 日本 铁氧体 H7C1-EC28 2 500 0.51 0.117 12 28×28×10 ≤0.5 MHz II 中国 铁氧体 R2KB 2 000±500 0.40 0.120 24 25×25×18 ≤0.3 MHz III 中国 高硅钢 0.3 mm片厚卷压 15 000 1.70 - - 30×20×13 4 kHz~20 kHz  下载: 导出CSV
下载: 导出CSV
表 3 加力元件磁芯与绕组骨架结构
种类号 铁氧体磁芯 骨架 分段数 间隙状态 单 双 I-1-0 H7C1-EC28 √ - 1 不可调 I-1-1 H7C1-EC28 √ - 2 不可调 II-2-2 R2KB 短 - √ 6 可调 II-1-1 R2KB长 - √ 7 可调
下载: 导出CSV
表 4 不同结构下杂散电容的设计值与实测值
参数型号 w2/匝 X 设计值/pF 实测值/pF C1 Cm Cn C2 C2 I-1-0 2 400 1 20.95 0.11 0 21.06 24.80 I-1-1 2 400 2 5.04 14.03 2.20 21.27 12.70 II-2-2 3 000 6 0.16 0.54 1.52 2.22 2.49 II-1-1 3 000 7 0.25 1.61 1.03 2.89 3.41
下载: 导出CSV
表 5 三种用于ESS的高压变压器比较
型号 测量
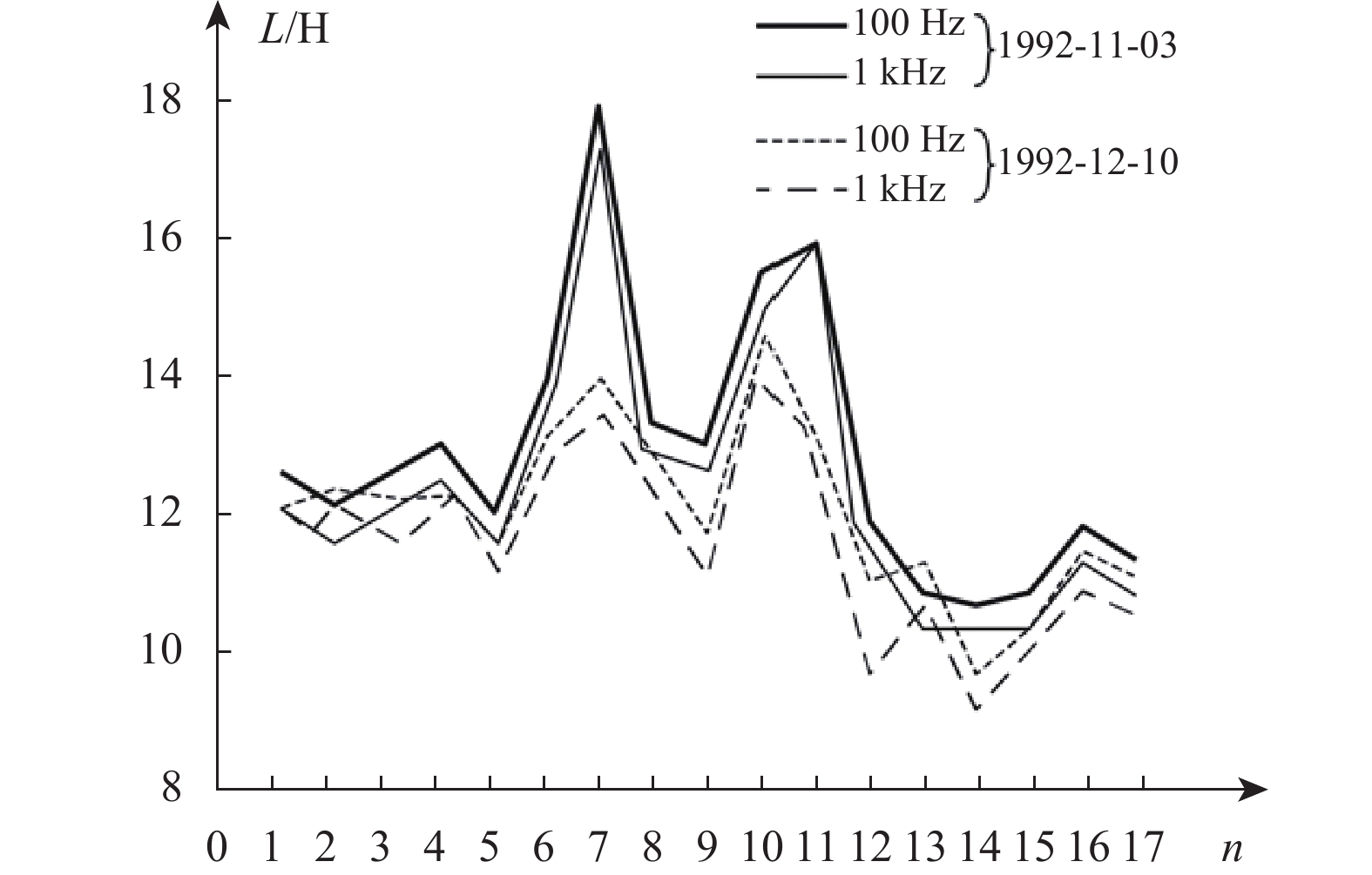
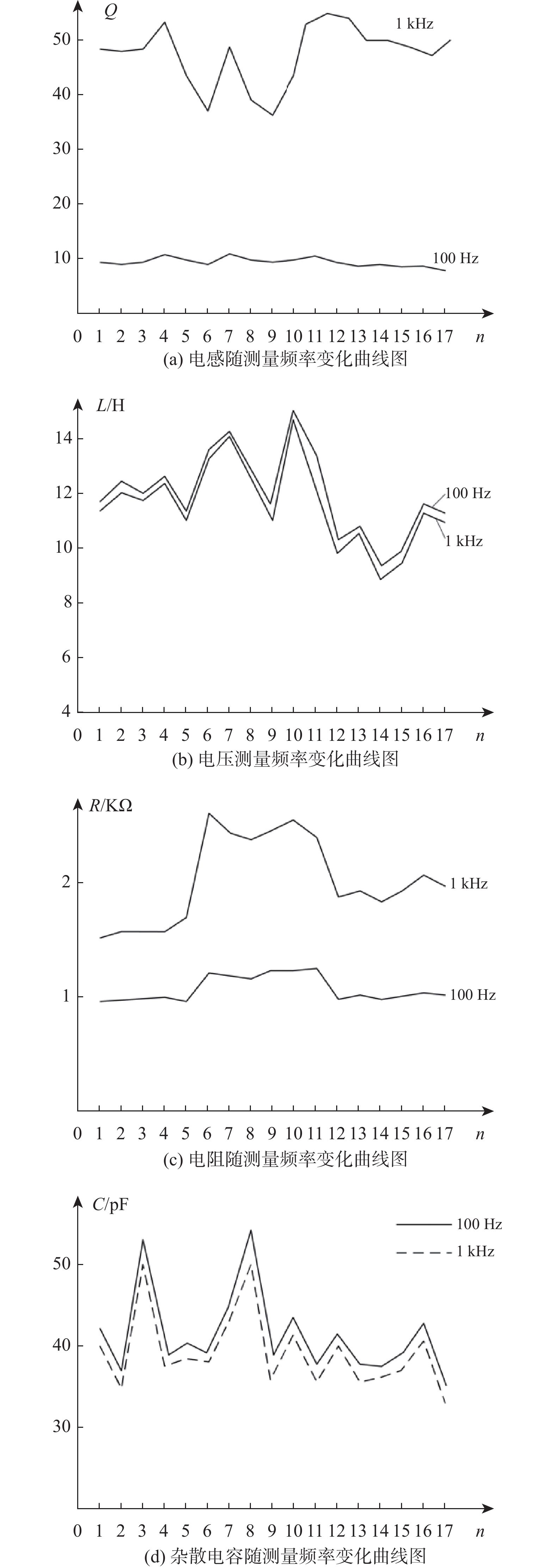
频率25 ℃ 35 ℃ 65 ℃ L/H r/Ω C/pF L/H r/Ω C/pF L/H r/Ω C/pF I-1型 100 Hz 9.32 970 35.5 10.73 997.3 34.7 12.59 1032 36.1 1 kHz 9.12 1670 35.2 10.59 1780.0 33.2 12.55 1800 35.7 旧铁
氧体100 Hz 1.88 1357 38.3 1.89 1380.0 39.5 1.91 1475 38.9 1 kHz 1.86 1610 38.9 1.87 1630.0 39.1 1.89 1710 38.8 低硅
钢片100 Hz 45.20 4237 29.0 48.80 4612.0 27.1 47.98 4705 25.6 1 kHz 41.40 1 810 28.7 43.40 1 912.0 27.0 43.00 1 920 25.1
下载: 导出CSV
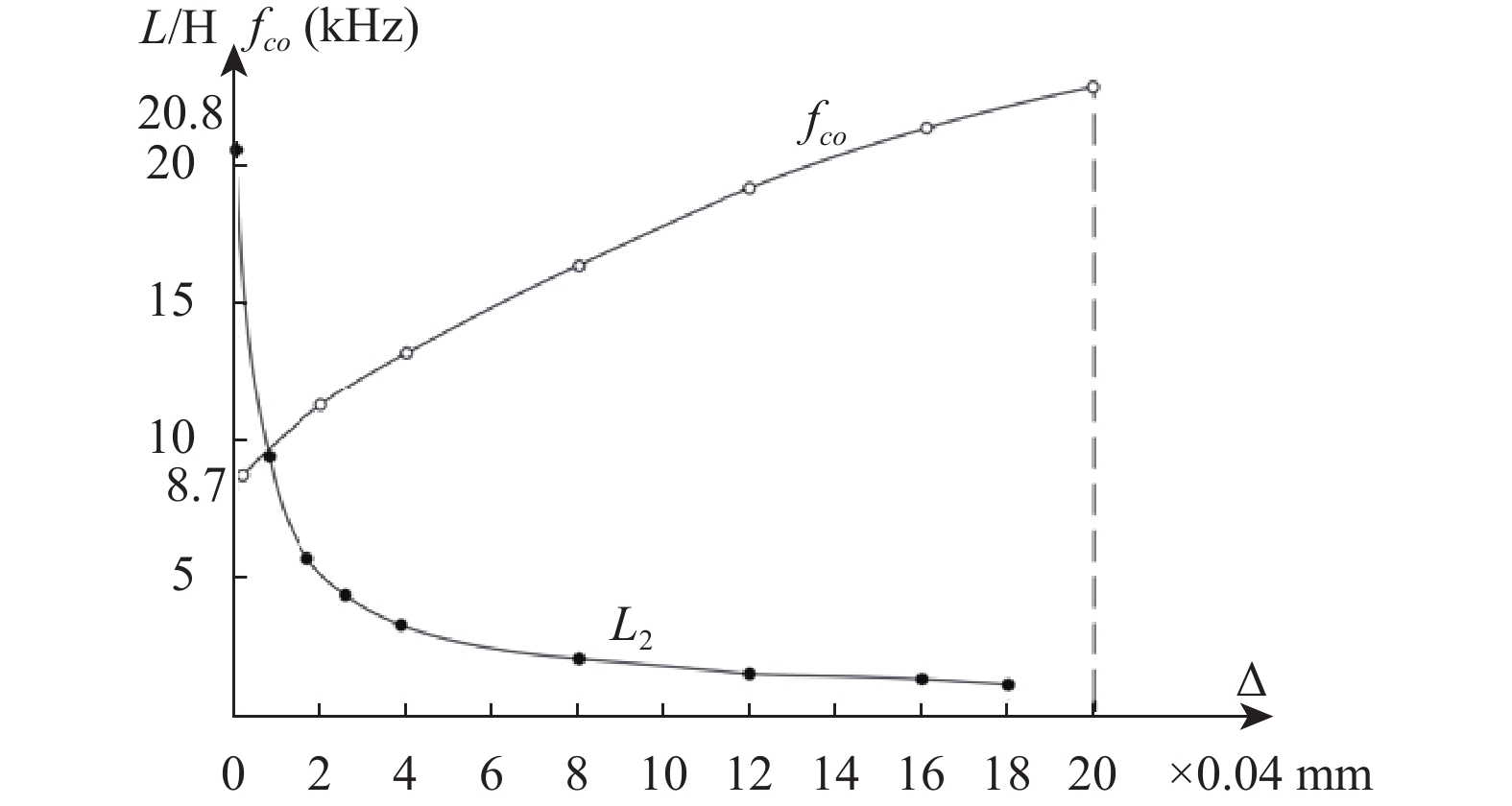
表 6 CL=33 pF,Δ=0.24 mm时输入输出特性
f/kHz V2/kV I1/mA 15 1.20 140 17 1.20 80 20 1.20 180 23 1.24 280 25 1.20 350 28 1.24 440 30 1.24 500 35 1.30 600
下载: 导出CSV
表 7 20 kHz下高压电阻
$R $ 与通频带$ {B}_{c} $ 实验R/kΩ Bc/kHz Q 0 1.4 14.0 2 2.0 10.0 4 5.0 4.0 6 8.0 2.5 8 13.0 1.5
下载: 导出CSV
-
[1] 晏磊, 才德蓉, 滕云鹤, 等. 有源谐振静电陀螺支承系统的设计与实验研究[J]. 中国惯性技术学报, 1994(4): 40-44. [2] 高钟毓. 静电陀螺仪技术[M]. 北京: 清华大学出版社, 2004. [3] 张军安, 邱长华, 颜明, 等. 静电陀螺仪空心球转子变形分析[J]. 光学精密工程, 2006, 14(1): 116-120. [4] 孙爱良. 静电悬浮转子悬浮控制系统探析[J]. 自动化与仪器仪表, 2012(2): 182-183. [5] 晏磊, 刘光军. 静电悬浮控制系统[M]. 北京: 国防工业出版社, 2001. [6] 肖奇军, 李胜勇, 陈文元, 等. 静电悬浮转子微陀螺悬浮控制系统级仿真[J]. 中国惯性技术学报, 2013, 21(3): 397-401. -











 点击查看大图
点击查看大图
图(15) / 表(7)
计量
- 文章访问数: 240
- HTML全文浏览量: 131
- PDF下载量: 23
- 被引次数: 0
