

Performance analysis of BDS-3 PPP/INS tightly-coupled positioning
-
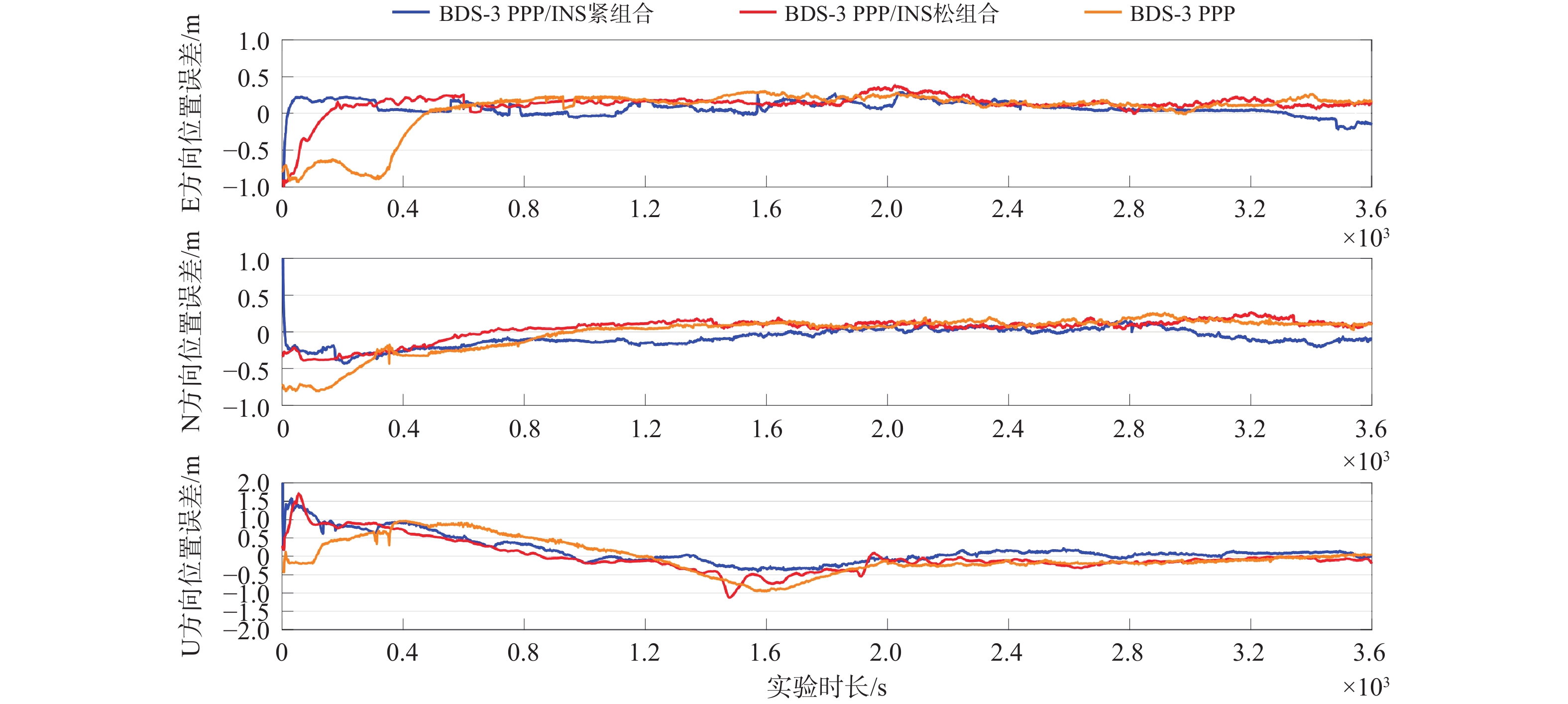
摘要: 随着我国北斗三号全球卫星导航系统(BDS-3)的全面建成,基于BDS-3的高精度定位定姿应用需求日益迫切. 推导了无电离层组合模式BDS-3 精密单点定位(PPP)模型及地心地固坐标系下的惯性导航系统(INS)误差方程,构建了BDS-3 PPP/INS紧组合定位滤波模型,分别针对BDS-3 PPP、BDS-3 PPP/INS松组合、BDS-3 PPP/INS紧组合三种模式进行了定位性能评估. 实验结果表明:BDS-3 PPP/INS松组合与 BDS-3 PPP位置精度基本一致;BDS-3 PPP/INS紧组合在东(E)、北(N)、天顶(U)方向位置精度为分别7.9 cm、9.3 cm、9.4 cm,较BDS-3 PPP/INS松组合位置精度分别提升了38.3%、33.1%、35.6%,速度精度分别提升了27.3%、45.8%、12%,姿态精度相当.
-
关键词:
- 北斗三号全球卫星导航系统(BDS-3) /
- 精密单点定位(PPP) /
- 紧组合 /
- 惯性导航系统(INS) /
- 组合导航系统
Abstract: With the completion of BDS-3 in China, the requirements of high-precision positioning and attitude determination based on BDS-3 is increasingly urgent. This paper derives the BDS-3 precise point positioning(PPP)model with ionosphere-free combination and inertial navigation system(INS)error equation in geocentric fixed coordinate system , and constructs the BDS-3 PPP/INS tight combination filtering model. This paper evaluates the positioning performance of BDS-3 PPP, BDS-3 PPP/INS loose combination model and BDS-3 PPP/INS tight combination model. The results of the experiment show that the position accuracy of BDS-3 PPP/INS loose combination is basically the same as that of BDS-3 PPP, the position accuracy of BDS-3 PPP/INS tight combination model in the east, north and sky directions is 7.9 cm, 9.3 cm and 9.4 cm, which is higher than that of BDS-3 PPP/INS loose combination model by 38.3%, 33.1% and 35.6%; the speed is improved by 27.3%, 45.8% and 12% respectively in three directions; the attitude accuracy of both is equal. -
表 1 三种处理方案位置的RMSE统计
cm 解算模式 E N U BDS-3 PPP 13.4 14.2 14.2 BDS-3 PPP/INS松组合 12.8 13.9 14.6 BDS-3 PPP/INS紧组合 7.9 9.3 9.4  下载: 导出CSV
下载: 导出CSV
表 2 两种处理方案速度、姿态的RMSE
解算模式 速度/cm/s 姿态/(°) E N U 横滚角 俯仰角 航向角 BDS-3 PPP/INS紧组合 0.480 0.450 0.220 0.024 0.024 0.025 BDS-3 PPP/INS松组合 0.660 0.830 0.250 0.024 0.024 0.027
下载: 导出CSV
-
[1] ZHANG Y F, GAO Y. Integration of INS and Un-Differenced GPS measurements for precise position and attitude determination[J]. Journal of navigation, 2008, 61(1): 87-97. DOI: 10.1017/S0373463307004432 [2] 吴富梅. GNSS/INS组合导航误差补偿与自适应滤波理论的拓展[D]. 郑州: 解放军信息工程大学, 2010. [3] DU S. Integration of precise point positioning and low cost MEMS IMU[D]. University of Calgary, 2010. [4] ELSHEIKH M, ABDELFATAH W F, NOURELDIN A, et al. Low-cost real-time PPP/INS integration for automated land vehicles[J]. Sensors, 2019, 19(22): 4896. DOI: 10.3390/s19224896 [5] GAO Z Z, GE M R, SHEN W B, et al. Evaluation on the impact of IMU grades on BDS+ GPS PPP/INS tightly coupled integration[J]. Advances in space research, 2017, 60(6): 1283-1299. DOI: 10.1016/j. asr.2017.06.022 [6] GAO Z Z, ZHANG H P, GE M R, et al. Tightly coupled integration of multi-GNSS PPP and MEMS inertial measurement unit data[J]. GPS solutions, 2017, 21(2): 377-391. DOI: 10.1007/s10291-016-0527-z [7] 高周正. 多模GNSS PPP/INS组合系统算法与应用研究[D]. 武汉: 武汉大学, 2016. [8] LIU S, SUN F P, ZHANG L D, et al. Tight integration of ambiguity-fixed PPP and INS: model description and initial results[J]. GPS solutions, 2016, 20(1): 39-49. DOI: 10.1007/s10291-015-0464-2 [9] DU Z Q, CHAI H Z, XIAO G R, et al. The realization and evaluation of PPP ambiguity resolution with INS aiding in marine survey[J]. Marine geodesy, 2020, 44(2): 1-22. DOI: 10.1080/01490419.2020.1852986 [10] 张且且, 赵龙, 周建华. 抗差自适应分步滤波算法在 PPP/INS组合导航中的应用[J]. 导航定位与授时, 2020, 7(5): 73-81. [11] 刘帅, 孙付平, 张伦东, 等. INS辅助周跳修复以实现精密单点定位瞬时重新收敛[J]. 中国惯性技术学报, 2015, 23(5): 607-614. DOI: 10.13695/j.cnki.12-1222/o3.2015.05.010 [12] 黎蕾蕾, 杨盛, 丁学文, 等. 一种INS辅助的PPP周跳探测方法[J]. 测绘学报, 2018, 47(11): 1457-1465. DOI: 10.11947/j.AGCS.2018.20170315 [13] DU S, GAO Y. Inertial aided cycle slip detection and identification for integrated PPP GPS and INS[J]. Sensors, 2012, 12(11): 14344-14362. DOI: 10.3390/s121114344 [14] 杨长风. 进入全球服务新时代的北斗系统[J]. 卫星应用, 2022(4): 8-9. DOI: 10.3969/j.issn.1674-9030.2022.04.005 -


 点击查看大图
点击查看大图

图(5) / 表(2)
计量
- 文章访问数: 331
- HTML全文浏览量: 167
- PDF下载量: 37
- 被引次数: 0
