

Positioning performance analysis of single epoch RTK with Beidou-3 new frequency point (B1C/B2a)
-
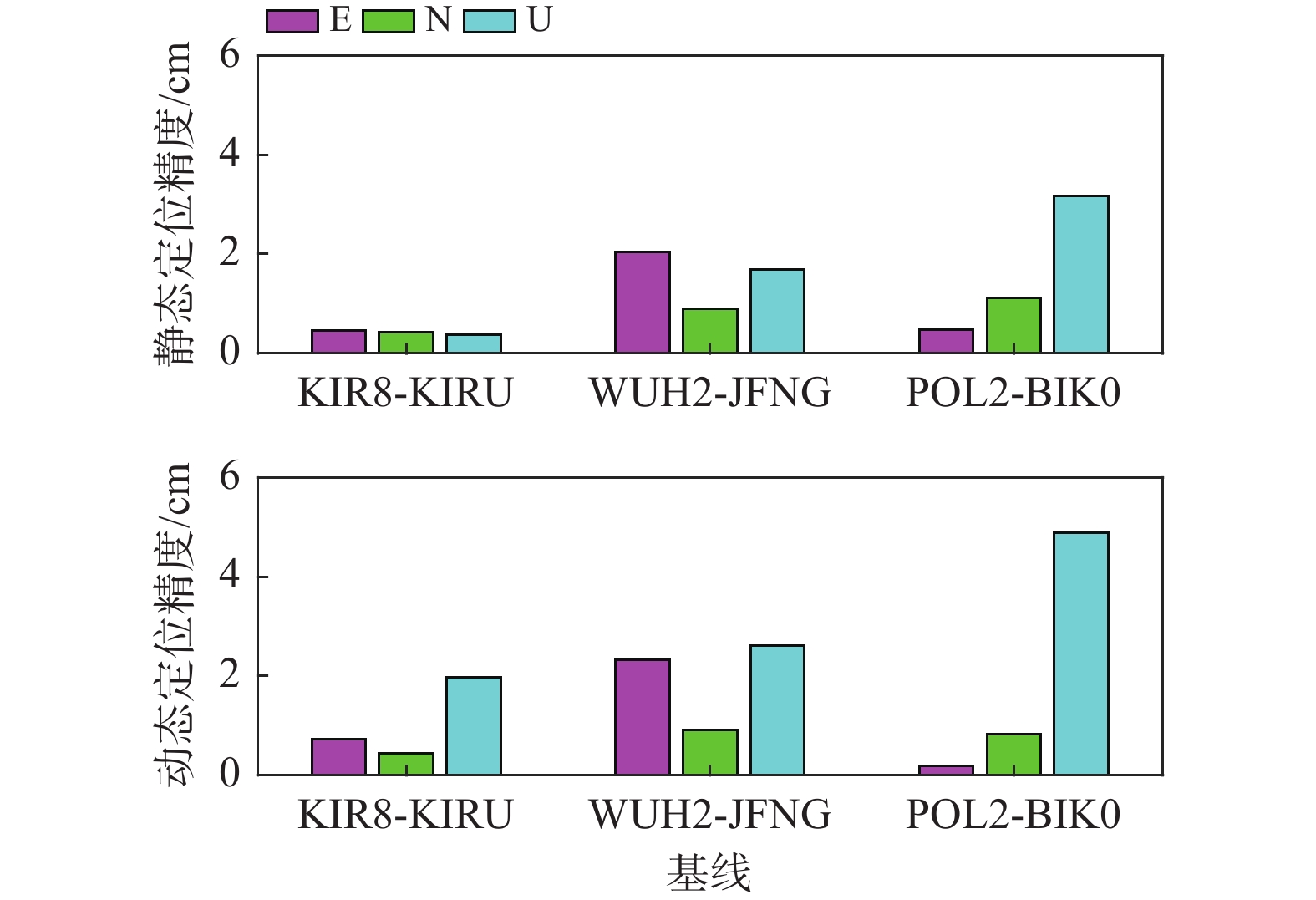
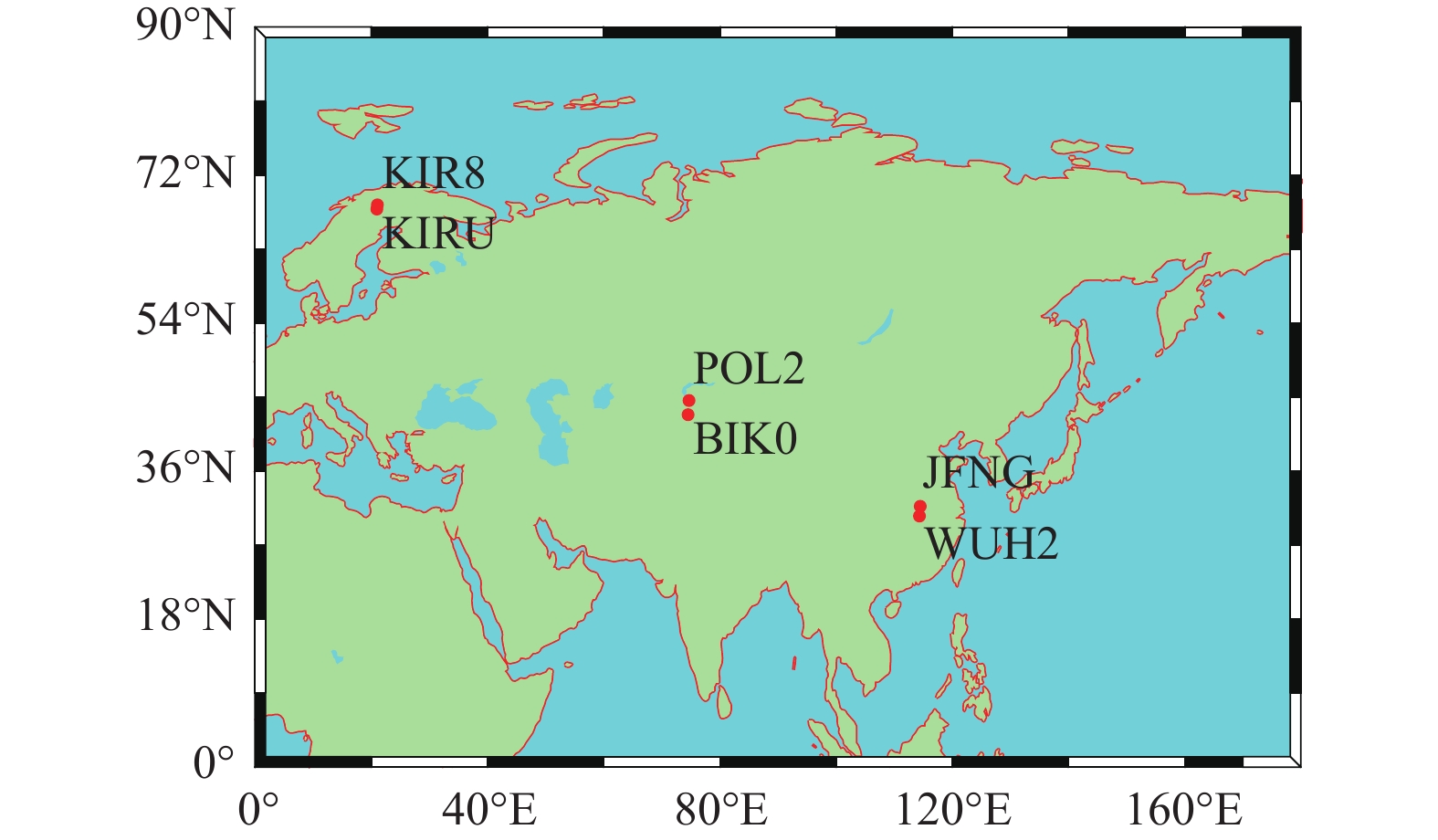
摘要: 北斗三号全球卫星导航系统(BDS-3)新频点B1C/B2a有效增加了北斗卫星导航系统(BDS)多频组合定位的多样性,并提升了定位性能. 为系统地评估BDS-3新频点实时动态(RTK)定位性能,选取6个MGEX (Multi-GNSS Experiment)测站构成三条基线,设计了BDS-3 B1I/B3I/B1C/B2a/B2b五种单频方案,BDS-2 B1I+B2I、BDS-2 B1I+B3I、BDS-3 B1C+B2a、BDS-3 B1I+B3I、BDS-2/BDS-3 B1I+B3I五种双频非组合方案和BDS-3 B1I+B3I+B1C+B2a+B2b五种频非组合方案进行RTK解算试验. 试验结果表明:当基线长度不超过25 km时,在静态模式下,东 (E)、北(N)和天顶(U)方向的BDS-3新频点B1C/B2a单频定位精度分别优于2.85 cm、1.67 cm和4.02 cm,双频定位精度分别优于1.63 cm、1.33 cm和3.26 cm,五频定位精度分别优于2.04 cm、1.12 cm和3.17 cm;在动态模式下, E、N和U方向的新频点单频定位精度分别优于3.03 cm、1.45 cm和6.49 cm,双频定位精度分别优于1.92 cm、0.95 cm和6.71 cm,五频定位精度分别优于2.32 cm、0.91 cm和4.89 cm. 两种模式下BDS-3新频点B1C+B2a与旧频点B1I+B3I双频定位精度相当,均优于BDS-2 B1I+B2I与B1I+B3I双频定位精度,同时BDS-3五频非组合方案定位精度与稳定性均优于单频和双频非组合方案.
-
关键词:
- 北斗三号全球卫星导航系统(BDS-3) /
- 新频点 /
- 实时动态(RTK) /
- 单历元 /
- 精度评定
Abstract: The design of new frequency points (B1C/B2a) for BDS-3 effectively increases the diversity of multi-frequency combination positioning as well as improves the positioning performance of the BDS system. To systematically evaluate the RTK positioning performance of the new frequency point for BDS-3, 6 MGEX tracking stations were selected to form three baselines. Five single-frequency schemes of BDS-3 B1I/B3I/B1C/B2a/B2b, five dual-frequency uncombined schemes of BDS-2 B1I+B2I, BDS-2 B1I+B3I, BDS-3 B1C+B2a, BDS-3 B1I+B3I, BDS-2/BDS-3 B1I+B3I and a five-frequency uncombined scheme of BDS-3 B1I+B3I+B1C+B2a+B2b were designed for real-title kinematic(RTK) solving tests. When the baseline length does not exceed 25 km, the test results show that, in static mode, in east (E), north (N) and up (U) directions, the single-frequency positioning accuracy of BDS-3 new frequency point B1C/B2a is better than 2.85 cm, 1.67 cm and 4.02 cm respectively, and the dual-frequency positioning accuracy is better than 1.63 cm, 1.33 cm and 3.26 cm respectively, and the five-frequency positioning accuracy is better than 2.04 cm, 1.12 cm and 3.17 cm respectively; in kinematic mode, in E, N and U directions, the single-frequency positioning accuracy is better than 3.03 cm, 1.45 cm and 6.49 cm respectively, and the dual-frequency positioning accuracy is better than 1.92 cm, 0.95 cm and 6.71 cm respectively, and the five-frequency positioning accuracy is better than 2.32 cm, 0.91 cm and 4.89 cm respectively. The dual frequency positioning accuracy of BDS-3 new frequency point B1C+B2a and old frequency point B1I+B3I are compared in both modes, and are both better than that of the the BDS-2 B1I+B2I and B1I+B3I dual frequency. In addition, the positioning accuracy and stability of BDS-3 five-frequency uncombined scheme are better than single-frequency and dual-frequency uncombined schemes. -
表 1 MGEX测站基本信息
测站名称 跟踪北斗信号 KIR8 B1I、B2I、B3I、B1C、B2a、B2b KIRU B1I、B2I、B3I、B1C、B2a、B2b JFNG B1I、B2I、B3I、B1C、B2a、B2b WUH2 B1I、B2I、B3I、B1C、B2a、B2b、B2a+b BIK0 B1I、B2I、B3I、B1C、B2a POL2 B1I、B2I、B3I、B1C、B2a、B2b  下载: 导出CSV
下载: 导出CSV
表 2 试验方案
单频定位试验 双频定位试验 多频定位实验 BDS-3 B1I BDS-2 B1I+B2I BDS-3 B1I+B3I+B1C+B2a+B2b BDS-3 B3I BDS-2 B1I+B3I BDS-3 B1C BDS-3 B1I+B3I BDS-3 B2a BDS-3 B1C+B2a BDS-3 B2b BDS-2/BDS-3 B1I+B3I
下载: 导出CSV
表 3 相对定位解算策略
解算参数 处理方案 高度截止角/(°) 7 数据采样间隔/s 30 卫星轨道与钟差 广播星历 电离层延迟修正 Klobuchar模型 对流层延迟修正 Saastamoinen模型 天线相位中心修正 igs14.atx 参数估计 Kalman
下载: 导出CSV
表 4 三条基线移动站各天平均可视卫星数
测站 系统 DOY 均值/颗 2 3 4 5 6 7 8 KIR8 BDS-2 4.2 4.0 4.2 4.2 4.3 4.4 4.3 4.2 BDS-3 10.6 10.6 10.6 10.6 10.7 10.8 10.6 10.6 WUH2 BDS-2 6.2 6.4 6.5 6.5 6.7 6.5 6.3 6.4 BDS-3 10.3 10.4 10.5 10.6 10.6 10.6 10.5 10.5 POL2 BDS-2 5.2 5.2 5.4 5.7 5.7 5.6 5.4 5.4 BDS-3 10.4 10.5 10.2 10.5 10.5 10.6 10.5 10.4
下载: 导出CSV
表 5 单频静态模式下各方案定位精度与模糊度固定率
频点 KIR8-KIRU WUH2-JFNG POL2-BIK0 E/cm N/cm U/cm Rate/% E/cm N/cm U/cm Rate/% E/cm N/cm U/cm Rate/% B1I 0.56 0.57 0.63 97.53 1.33 0.72 1.42 99.43 0.62 0.97 4.26 99.59 B3I 0.47 0.16 0.92 98.49 1.22 1.04 1.41 99.05 0.72 0.78 2.57 99.48 B1C 0.56 0.40 0.94 98.56 1.09 0.63 1.24 99.57 0.56 0.93 3.78 99.74 B2a 0.47 0.40 0.59 99.31 2.85 1.28 1.99 96.40 0.60 1.67 4.02 99.03 B2b 0.45 0.28 0.78 98.69 - - - - - - - -
下载: 导出CSV
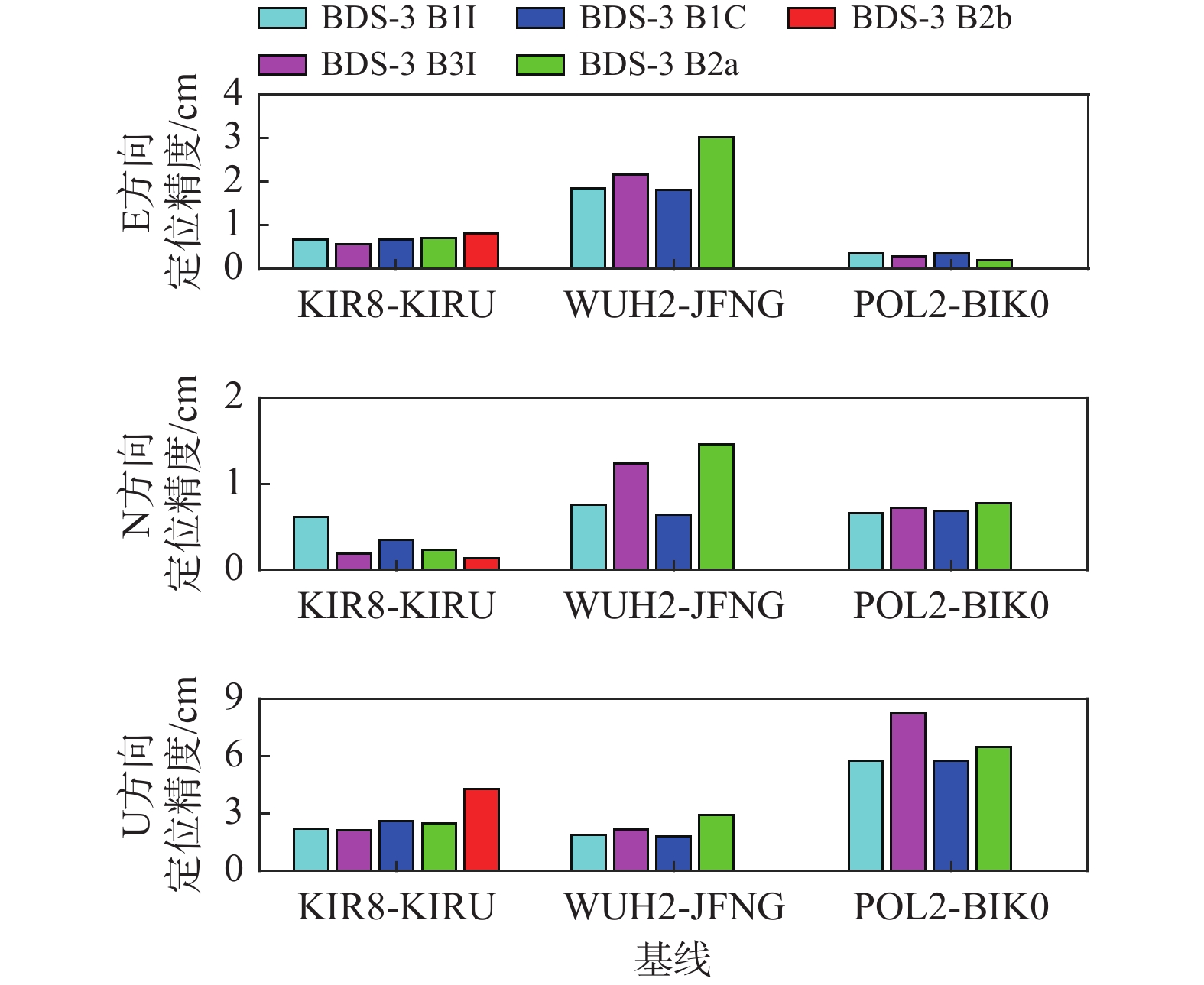
表 6 单频动态模式下各方案定位精度与模糊度固定率
频点 KIR8-KIRU WUH2-JFNG POL2-BIK0 E/cm N/cm U/cm Rate/% E/cm N/cm U/cm Rate/% E/cm N/cm U/cm Rate/% B1I 0.66 0.61 2.19 92.33 1.85 0.75 1.85 98.81 0.36 0.65 5.73 96.56 B3I 0.56 0.19 2.09 99.03 2.16 1.24 2.15 98.87 0.29 0.72 8.21 93.94 B1C 0.66 0.35 2.58 91.89 1.82 0.64 1.80 98.78 0.35 0.69 5.75 96.76 B2a 0.70 0.23 2.47 99.52 3.03 1.45 2.92 95.27 0.19 0.77 6.49 93.58 B2b 0.81 0.14 4.28 97.11 - - - - - - - -
下载: 导出CSV
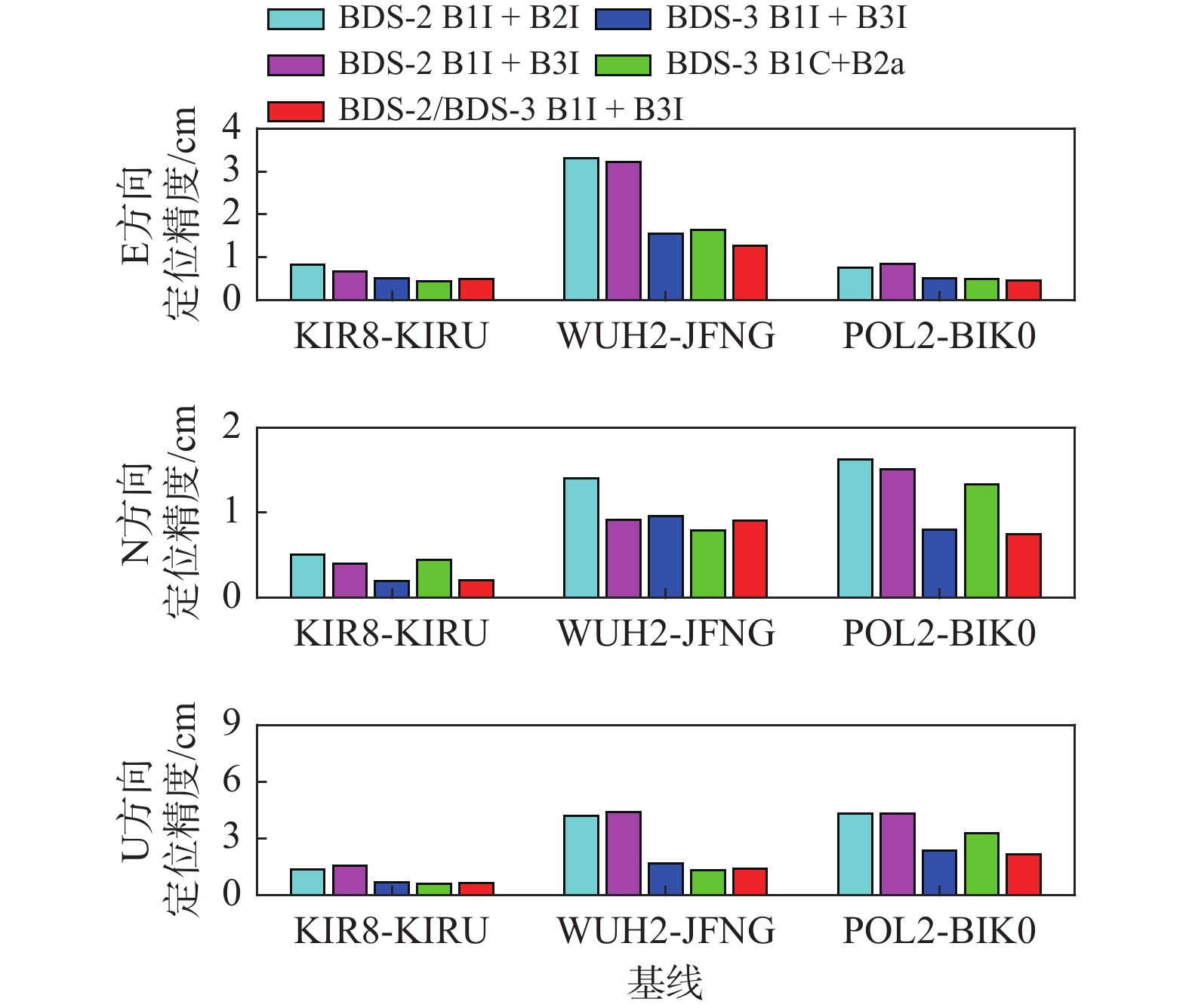
表 7 双频静态模式下各方案定位精度与模糊度固定率
频点 KIR8-KIRU WUH2-JFNG POL2-BIK0 E/cm N/cm U/cm Rate/% E/cm N/cm U/cm Rate/% E/cm N/cm U/cm Rate/% BDS-2 B1I+B2I 0.82 0.50 1.36 96.26 3.32 1.40 4.20 89.33 0.75 1.63 4.32 94.89 BDS-2 B1I+B3I 0.66 0.40 1.56 98.25 3.21 0.91 4.39 94.51 0.84 1.51 4.28 91.04 BDS-3 B1I+B3I 0.51 0.19 0.65 99.00 1.56 0.96 1.68 97.65 0.50 0.80 2.36 99.94 BDS-3 B1C+B2a 0.45 0.44 0.58 98.97 1.63 0.79 1.32 96.96 0.49 1.33 3.26 99.08 BDS-2/BDS-3 B1I+B3I 0.49 0.20 0.63 99.12 1.26 0.91 1.39 97.01 0.45 0.75 2.13 99.98
下载: 导出CSV
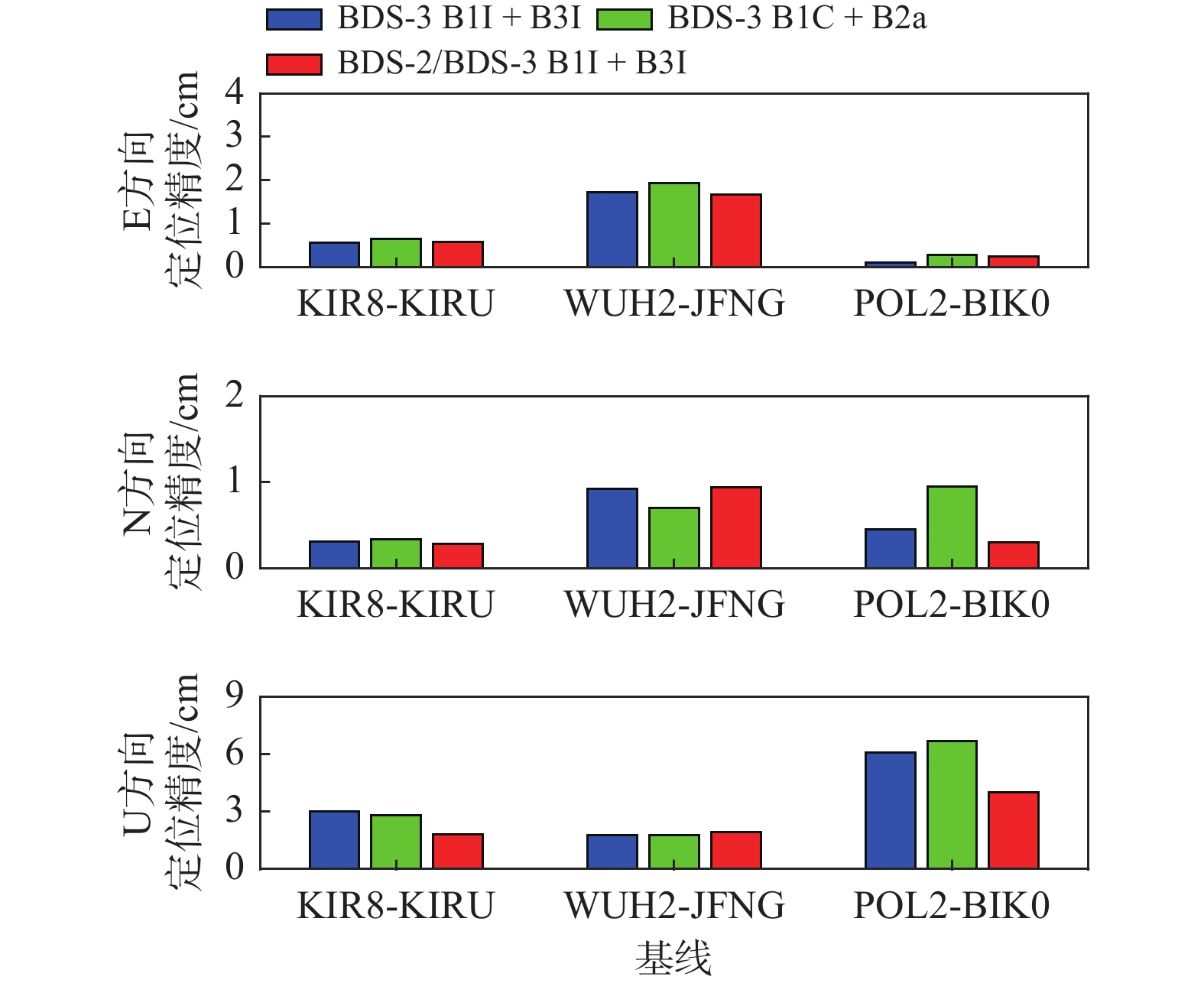
表 8 双频动态模式下各方案定位精度与模糊度固定率
频点 KIR8-KIRU WUH2-JFNG POL2-BIK0 E/cm N/cm U/cm Rate/% E/cm N/cm U/cm Rate/% E/cm N/cm U/cm Rate/% BDS-2 B1I+B2I 24.55 16.82 35.83 86.04 44.53 10.84 23.94 70.67 1.46 7.46 24.57 87.01 BDS-2 B1I+B3I 26.70 18.13 44.67 89.75 10.56 2.23 13.55 94.11 6.02 9.46 38.39 74.24 BDS-3 B1I+B3I 0.56 0.31 3.01 98.38 1.72 0.92 1.78 98.84 0.10 0.45 6.10 95.02 BDS-3 B1C+B2a 0.65 0.34 2.81 98.88 1.92 0.70 1.77 97.64 0.28 0.95 6.71 95.55 BDS-2/BDS-3 B1I+B3I 0.58 0.28 1.83 98.36 1.67 0.94 1.93 98.91 0.25 0.30 4.01 97.53
下载: 导出CSV
表 9 五频静态、动态模式下三条基线定位精度与模糊度固定率
频点 模式 KIR8-KIRU WUH2-JFNG POL2-BIK0 E/cm N/cm U/cm Rate% E/cm N/cm U/cm Rate% E/cm N/cm U/cm Rate% BDS-3 B1I+B3I+
B1C+B2a+B2b静态模式 0.46 0.43 0.38 99.17 2.04 0.90 1.68 98.37 0.47 1.12 3.17 92.89 动态模式 0.73 0.43 1.97 96.79 2.32 0.91 2.61 98.96 0.18 0.82 4.89 94.29
下载: 导出CSV
-
[1] 杨元喜, 李金龙, 王爱兵, 等. 北斗区域卫星导航系统基本导航定位性能初步评估[J]. 中国科学:地球科学, 2014, 44(1): 72-81. [2] YANG Y, LIU L, LI J, et al. Featured services and performance of BDS-3[J]. Science bulletin, 2021, 66(20): 2135-2143. DOI: 10.1016/j.scib.2021.06.013 [3] 郑爽, 王世杰. 北斗三号短基线相对定位精度分析[J]. 全球定位系统, 2020, 45(1): 61-65. DOI: 10.13442/j.gnss.1008-9268.2020.01.010 [4] MI X L, ZHANG B C, YUAN Y B, et al. Characteristics of GPS, BDS2, BDS3 and Galileo inter-system biases and their influence on RTK positioning[J]. Measurement science and technology, 2019, 31(1): 015009. DOI: 10.1088/1361-6501/ab4209 [5] 杨元喜, 许扬胤, 李金龙, 等. 北斗三号系统进展及性能预测——试验验证数据分析[J]. 中国科学:地球科学, 2018, 48(5): 584-594. [6] 王楚扬, 秘金钟, 李勇熹, 等. BDS-3/GPS/Galileo组合动态差分定位算法研究[J]. 测绘科学, 2022, 47(2): 16-22. DOI: 10.16251/j.cnki.1009-2307.2022.02.003 [7] 曹多明, 成英燕, 常春涛, 等. BDS不同卫星选择对相对定位精度的影响研究[J]. 测绘科学, 2022, 47(1): 15-23. DOI: 10.16251/j.cnki.1009-2307.2022.01.003 [8] 梁玉可, 党亚民, 杨强, 等. BDS不同星座组合对亚太地区相对定位的影响[J]. 测绘科学, 2022, 47(1): 33-39. DOI: 10.16251/j.cnki.1009-2307.2022.01.005 [9] 彭广民. BDS-2/BDS-3短基线相对定位精度分析[J]. 地矿测绘, 2021, 37(1): 8-12. DOI: 10.3969/j.issn.1007-9394.2021.01.003 [10] 罗杰. 不同截止高度角下BDS-2/BDS-3短基线RTK定位性能分析[J]. 地理空间信息, 2021, 19(11): 44-47. DOI: 10.3969/j.issn.1672-4623.2021.11.012 [11] 刘洋洋, 杨颖, 孙张振, 等. 解算策略对BDS-3新信号双频RTK定位性能的影响[C]//第十三届中国卫星导航年会, 2022: 180-185. [12] 朱松, 李玮. BDS-3卫星信号质量及RTK定位分析[J]. 测绘科学, 2022, 47(1): 1-8. DOI: 10.16251/j.cnki.1009-2307.2022.01.001 [13] 糜晓龙, 袁运斌, 张宝成. BDS-3和Galileo 组合的RTK定位性能分析[J/OL]. (2021-10-29)[2022-07-12]. 武汉大学学报(信息科学版). http://kns.cnki.net/kcms/detail/42.1676.TN.20211029.1234.004.html [14] 戴金倩, 吴迪, 戴小蕾, 等. BDS-3实时精密单点定位精度分析[J]. 测绘通报, 2020(1): 30-34. DOI: 10.13474/j.cnki.11-2246.2020.0007 [15] 李毓照, 闫浩文, 王世杰, 等. BDS三频信号最优组合的模糊聚类分析法[J]. 测绘学报, 2020, 49(8): 974-982. DOI: 10.11947/j.AGCS.2020.20190432 [16] 边少锋, 刘一, 纪兵, 等. 北斗三号卫星观测信息高度角相关随机模型统计特性分析[J]. 武汉大学学报(信息科学版), 2022, 47(10): 1615-1624. [17] 吴云, 刘万科. 最优估计基础[M]. 武汉: 武汉大学出版社, 2021: 128-133. [18] TEUNISSEN P J G. A canonical theory for short GPS baselines part I: the baseline precision[J]. Journal of geodesy, 1997, 71(6): 320-336. DOI: 10.1007/s001900050100 [19] TEUNISSEN P J G. The least-square ambiguity decorrelation adjustment: a method for fast GPS ambiguity estimation[J]. Journal of geodesy, 1995, 70(1): 65-82. DOI: 10.1007/BF00863419 [20] 陈文涛, 程鹏飞, 徐彦田, 等. 单差模糊度的BDS/GLONASS多频RTK算法[J]. 测绘科学, 2020, 45(4): 7-12. DOI: 10.16251/j.cnki.1009-2307.2020.04.002 [21] VERHAGEN S, TEUNISSEN P J G. The ratio test for future GNSS ambiguity resolution[J]. GPS solutions, 2013, 17(4): 535-548. DOI: 10.1007/s10291-012-0299-z [22] 李涌涛, 李建文, 潘林, 等. 北斗三号新信号B1C和B2a观测数据质量分析评估[J]. 地球科学进展, 2018(11): 1161-1168. DOI: 10.11867/j.issn.1001-8166.2018.11.1161. -







 点击查看大图
点击查看大图
图(16) / 表(9)
计量
- 文章访问数: 426
- HTML全文浏览量: 205
- PDF下载量: 43
- 被引次数: 0
