GNSS World of China
GNSS World of China
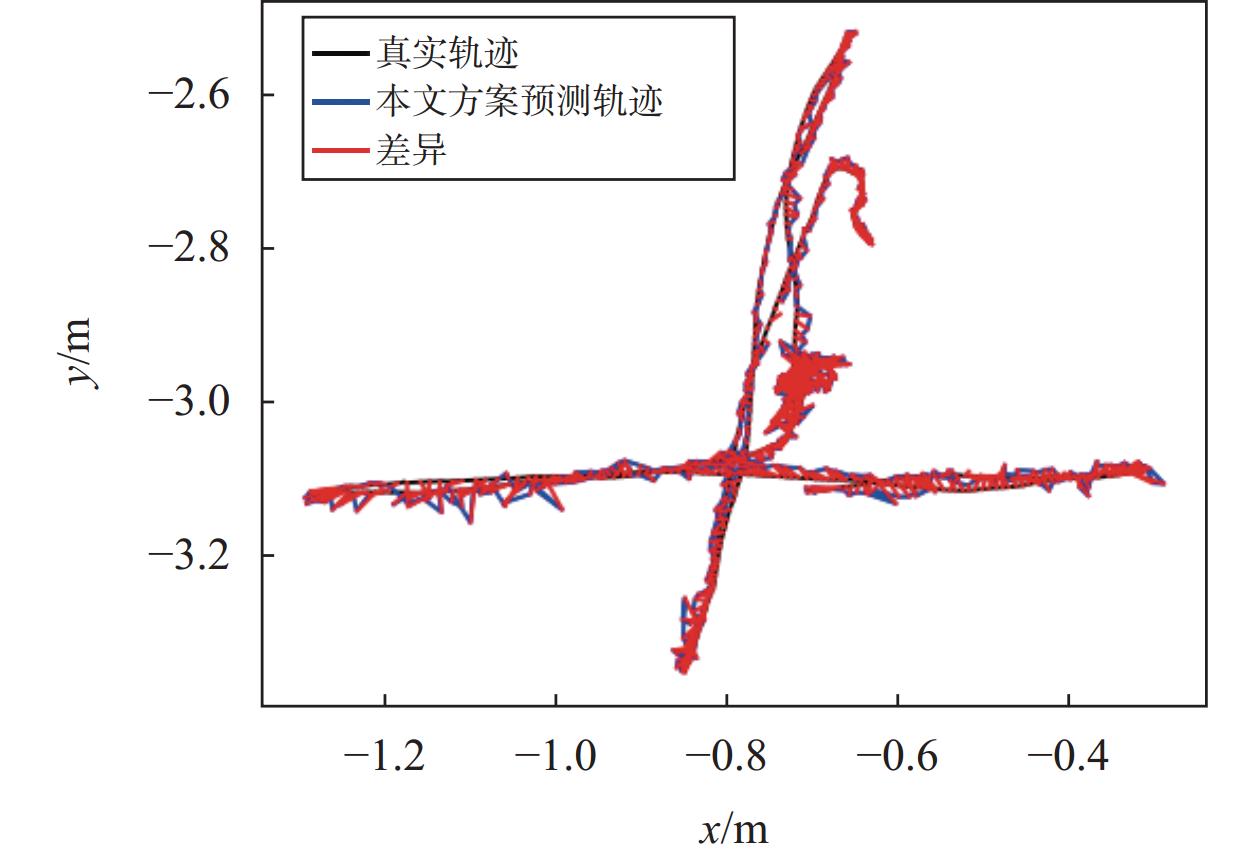
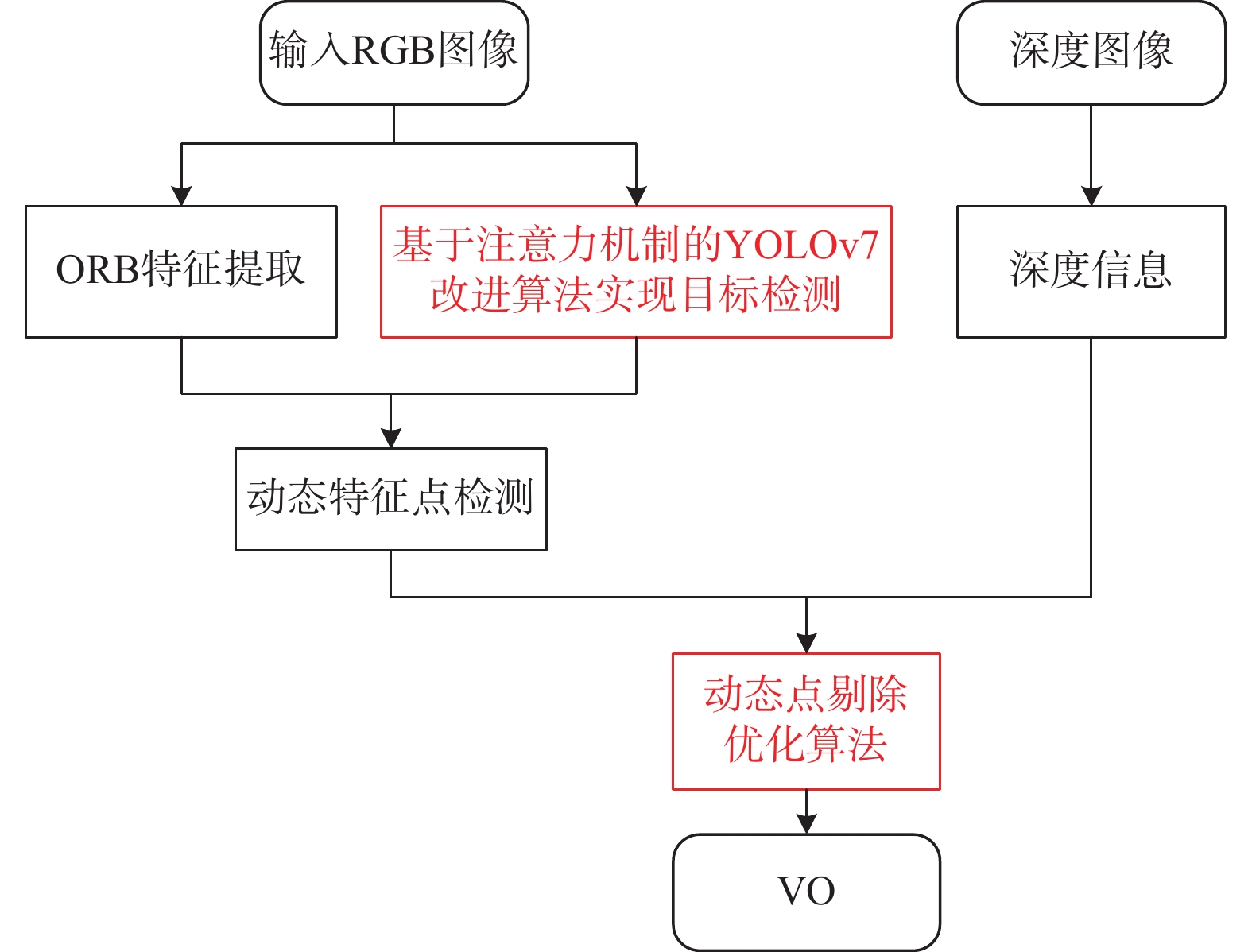
| Citation: | YE Ruixin, ZHANG Lingwen, CHEN Jia, QIAO Shangbing, ZHU Ying. Dynamic feature point removal method with joint target detection and depth information[J]. GNSS World of China, 2024, 49(3): 94-100. doi: 10.12265/j.gnss.2024015

|

| [1] |
MUR-ARTAL R, MONTIEL J M, TARDÓS J D. ORB-SLAM: a versatile and accurate monocular SLAM system[J]. IEEE transactions on robotics, 2015, 31(5): 1147-1163. DOI: 10.1109/TRO.2015.2463671
|
| [2] |
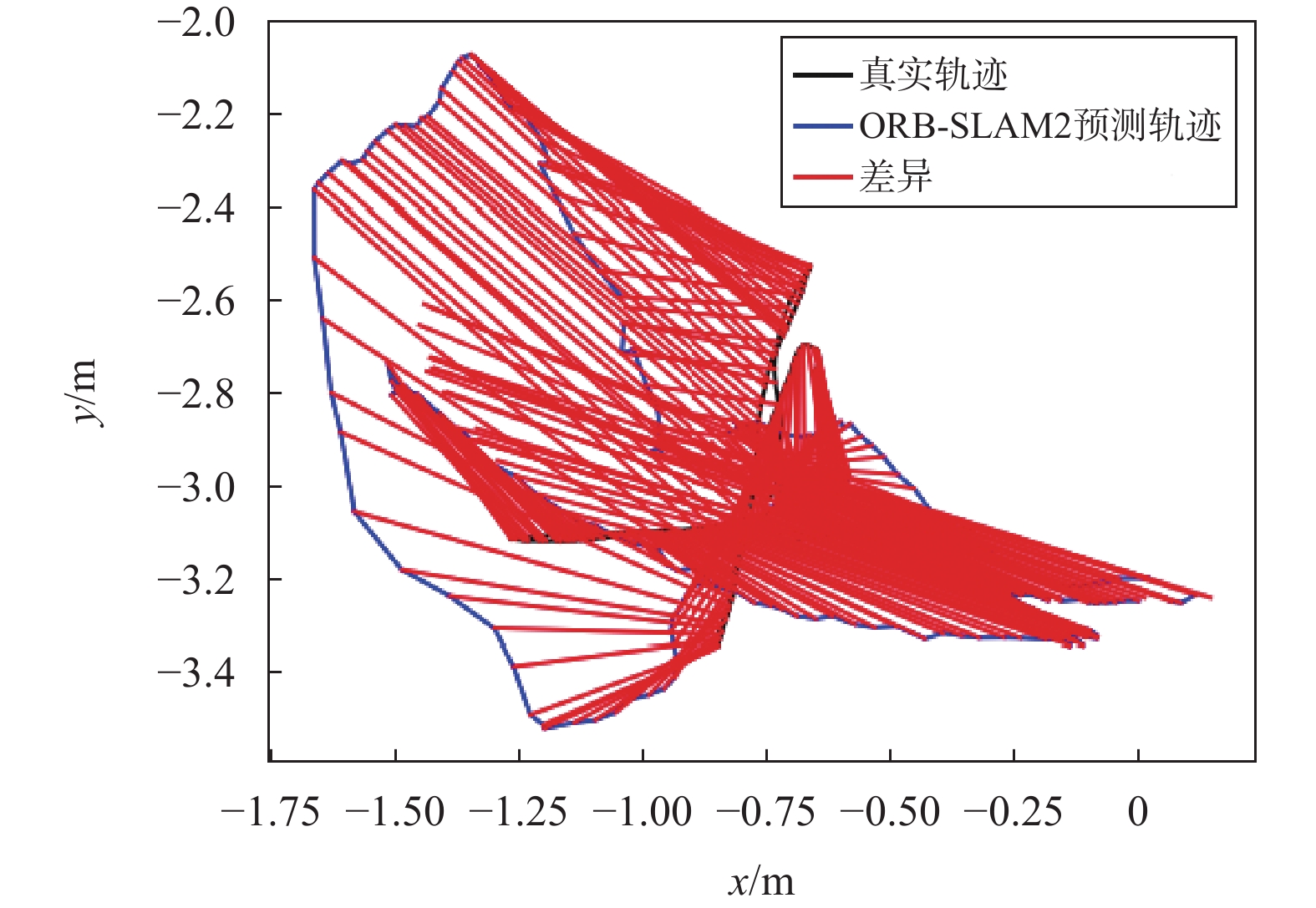
MUR-ARTAL R, TARDÓS J D. ORB-SLAM2: an open-source SLAM system for monocular, stereo, and RGB-D cameras[J]. IEEE transactions on robotics, 2017, 33(5): 1255-1262. DOI: 10.1109/TRO.2017.2705103
|
| [3] |
CHEN W, SHANG G, JI A, et al. An overview on visual slam: from tradition to semantic[J]. Remote sensing, 2022, 14(13): 3010. DOI: 10.3390/rs14133010
|
| [4] |
BESCOS B, FACIL J M, CIVERA J, et al. DynaSLAM: tracking, mapping, and inpainting in dynamic scenes[J]. IEEE robotics and automation letters, 2018, 3(4): 4076-4083. DOI: 10.1109/LRA.2018.2860039
|
| [5] |
YU C, LIU Z, LIU X J, et al. DS-SLAM: a semantic visual slam towards dynamic environments[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018: 1168-1174. DOI: 10.1109/IROS.2018.8593691
|
| [6] |
RAN T, YUAN L, ZHANG J, et al. RS-SLAM: a robust semantic slam in dynamic environments based on RGB-D sensor[J]. IEEE sensors journal, 2021, 21(18): 20657-20664. DOI: 10.1109/JSEN.2021.3099511
|
| [7] |
张梦珠, 黄劲松. 基于语义特征的视觉定位研究[J]. 测绘地理信息, 2022, 47(4): 33-37.
|
| [8] |
刘胤真, 徐向荣, 张卉, 等. 动态场景下基于语义和几何约束的视觉SLAM算法[J/OL]. (2023-11-02)[2024-01-15]. 信息与控制. https://doi.org/10.13976/j.cnki.xk.2024.3089
|
| [9] |
高逸, 王庆, 杨高朝, 等. 基于几何约束和目标检测的室内动态SLAM[J]. 全球定位系统, 2022, 47(5): 51-56.
|
| [10] |
潘海鹏, 刘培敏, 马淼. 基于语义信息与动态特征点剔除的SLAM算法[J]. 浙江理工大学学报(自然科学版), 2022, 47(5): 764-773.
|
| [11] |
付豪, 徐和根, 张志明, 等. 动态场景下基于语义和光流约束的视觉同步定位与地图构建[J]. 计算机应用, 2021, 41(11): 3337-3344.
|
| [12] |
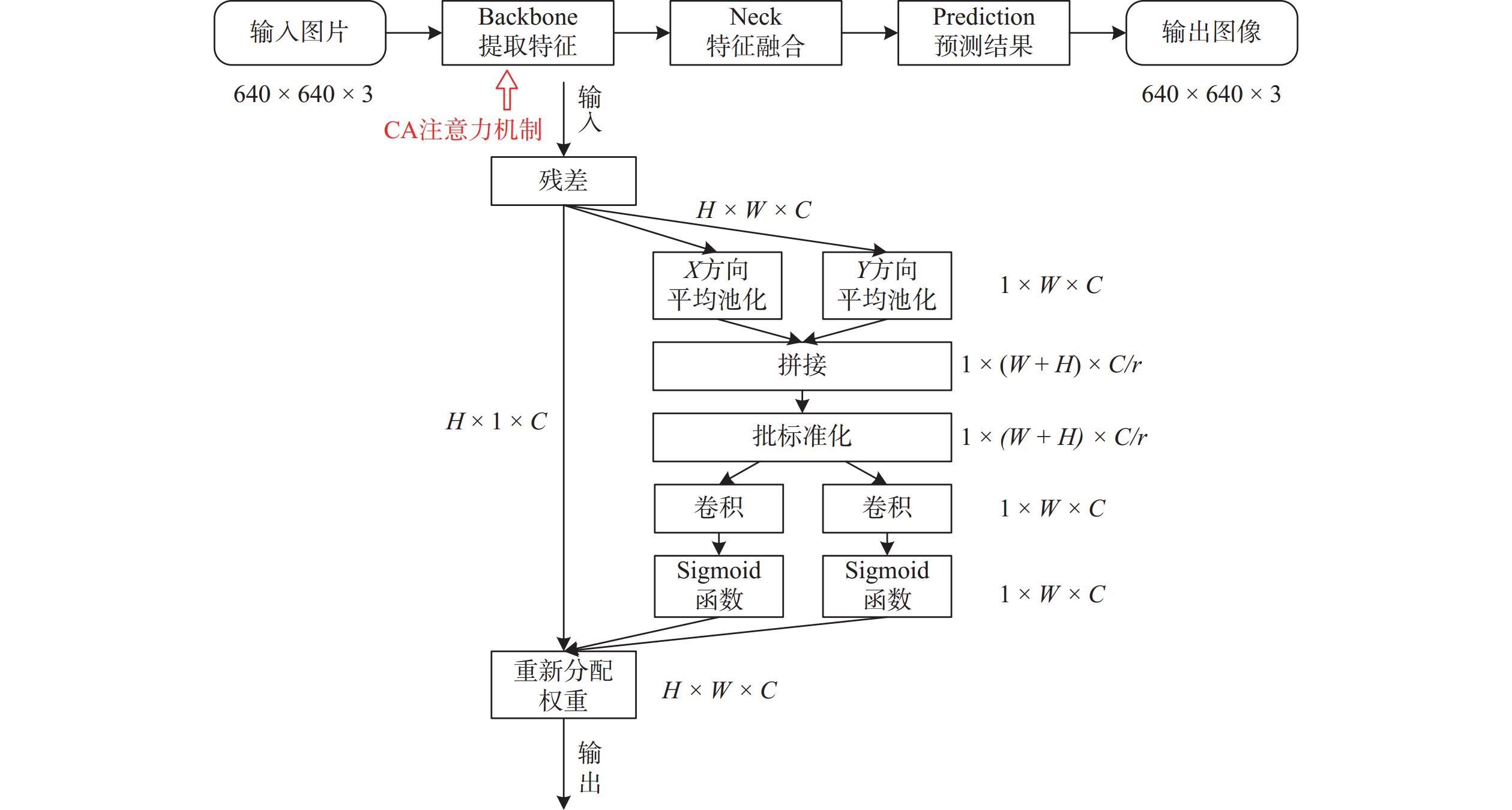
HOU Q, ZHOU D, FENG J. Coordinate attention for efficient mobile network design[C]//The IEEE/CVF conference on computer vision and pattern recognition, 2021: 13713-13722. DOI: 10.1109/CVPR46437.2021.01350
|
| [13] |
STURM J, ENGELHARD N, ENDRES F, et al. A benchmark for the evaluation of RGB-D SLAM systems[C]//The International Conference on Intelligent Robot Systems (IROS), 2012. DOI: 10.1109/IROS.2012.6385773
|
Figures(6) / Tables(4)
Copyright © 2009《 GNSS World of China 》 Editorial Office
Address:84 Jianshe Dong Lu, Muye District, Xinxiang City, Henan Province, ChinaChina Pos:453000Tel:0373-3712411Fax:0373-3052232Email:qqdwxt@126.com
Supported by:
Beijing Renhe Information Technology Co. Ltd



 DownLoad:
DownLoad: