GNSS World of China
GNSS World of China
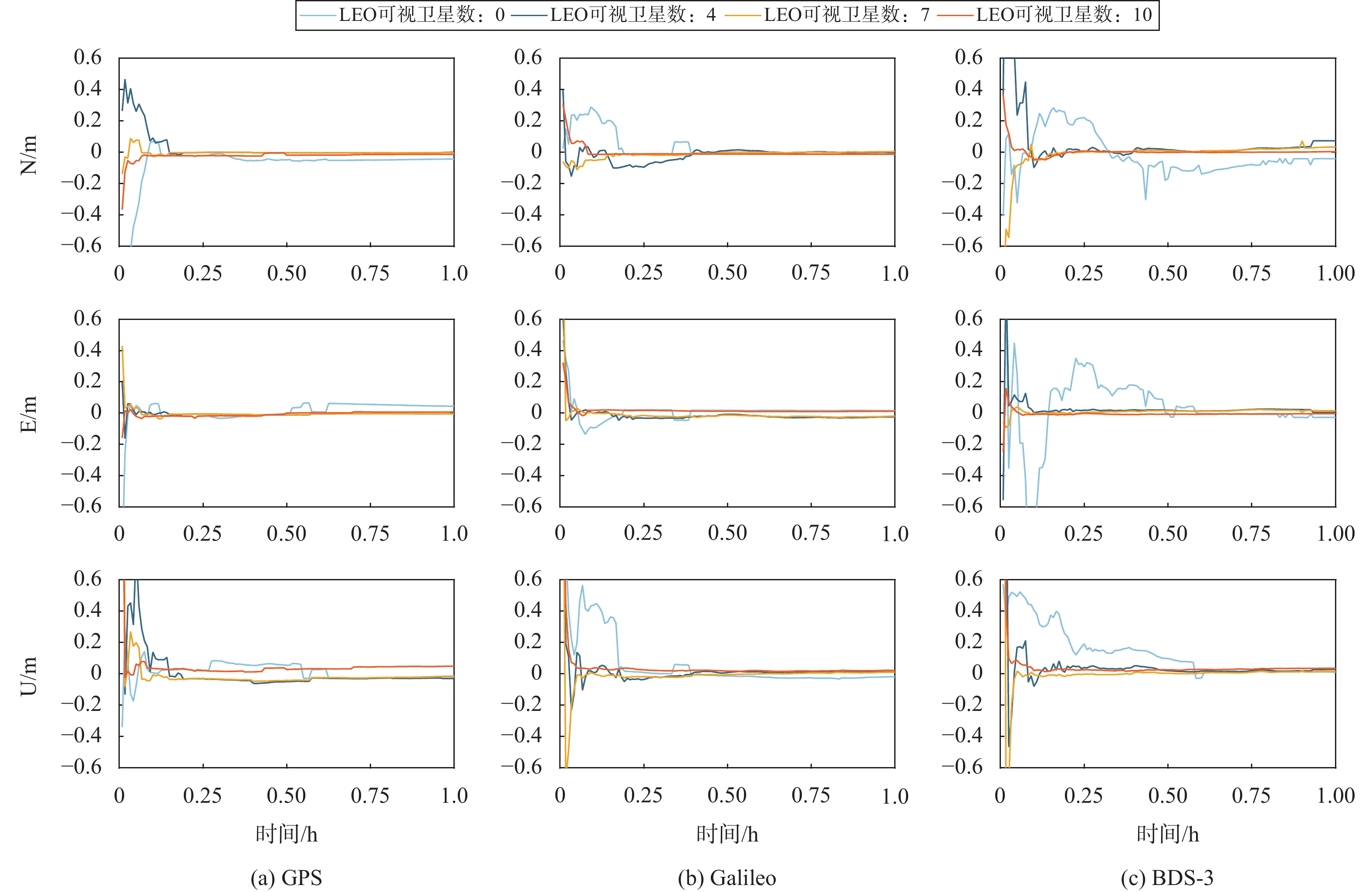
| Citation: | FANG Jing, TU Rui, WANG Peiyuan, TAO Linlin, ZUO Hang. Performance analysis of undifferenced PPP ambiguity resolution with LEO enhanced GPS, Galileo, BDS-3[J]. GNSS World of China, 2023, 48(4): 99-107. doi: 10.12265/j.gnss.2023044

|

| [1] |
KOUBA J, HÉROUX P. Precise point positioning using IGS orbit and clock products[J]. GPS solutions, 2001, 5(2): 12-28. DOI: 10.1007/PL00012883
|
| [2] |
HU J H, ZHANG X H, LI P, et al. Multi-GNSS fractional cycle bias products generation for GNSS ambiguity-fixed PPP at Wuhan University[J]. GPS solutions, 2020, 24(1): 15. DOI: 10.1007/s10291-019-0929-9
|
| [3] |
GABOR M J, NEREM R S. GPS carrier phase ambiguity resolution using satellite-satellite single differences[C]//Proceedings of ION GNSS 12th International Technical Meeting of the Satellite Division, 1999: 1569-1578.
|
| [4] |
GE M R, GENDT G, ROTHACHER M, et al. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations[J]. Journal of geodesy, 2008, 82(7): 389-399. DOI: 10.1007/s00190-007-0187-4
|
| [5] |
COLLINS P, LAHAYE F, HÉROUX P, et al. Precise point positioning with ambiguity resolution using the decoupled clock model[C]//Proceedings of International Technical Meeting of the Satellite Division of the Institute of Navigation, 2008: 16-19.
|
| [6] |
GENG J H, TEFERLE F N, SHI C, et al. Ambiguity resolution in precise point positioning with hourly data[J]. GPS solutions, 2009(13): 263-270. DOI: 10.1007/s10291-009-0119-2
|
| [7] |
LAURICHESSE D, MERCIER F, BERTHIAS J P, et al. Integer ambiguity resolution on undifferenced GPS phase measurements and its application to PPP and satellite precise orbit determination[J]. Navigation, 2009, 56(2): 135-149. DOI: 10.1002/navi.2009.56.issue-2
|
| [8] |
张小红, 李盼, 朱锋. 卫星端宽巷载波相位小数偏差估计方法研究与结果分析[J]. 武汉大学学报(信息科学版), 2012, 37(10): 1177-1180.
|
| [9] |
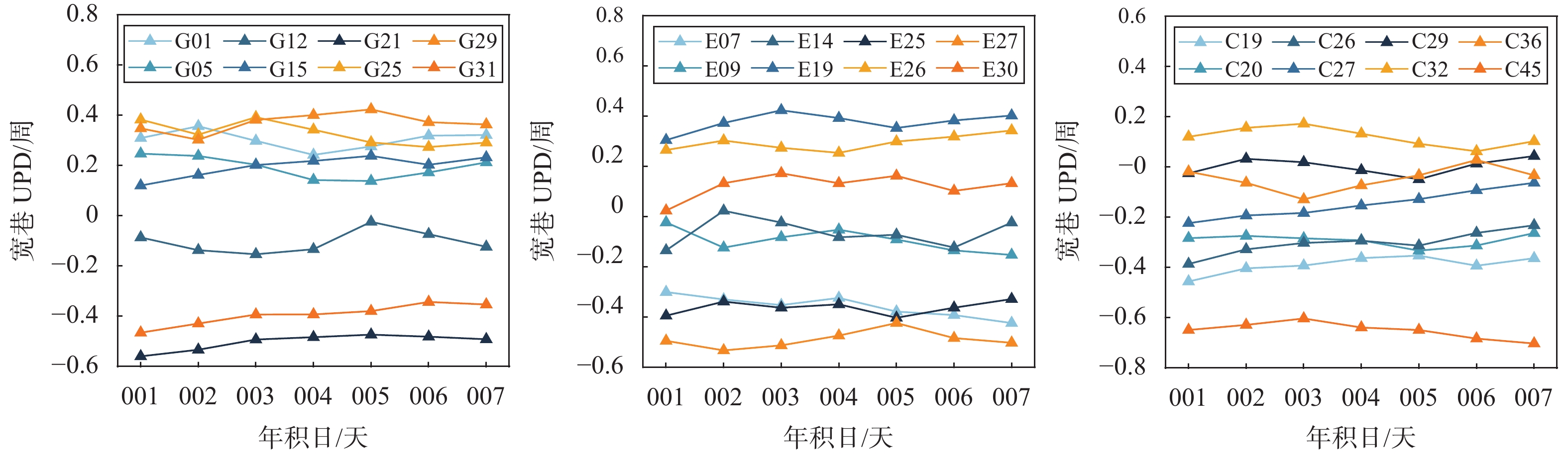
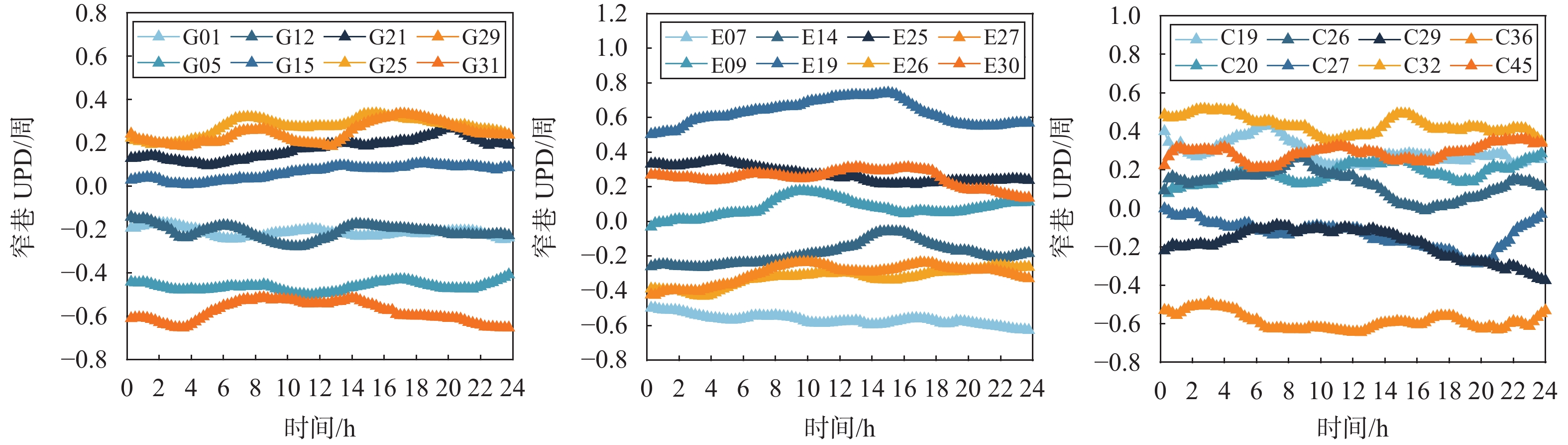
李林阳, 崔阳, 王宇谱, 等. 窄巷FCB估计方法改进及时变特性分析[J]. 测绘学报, 2017, 46(01): 34-43. DOI: 10.11947/j.AGCS.2017.20160222
|
| [10] |
宋保丰, 郝金明, 师一帅, 等. 非差FCB估计及其在PPP模糊度固定中的应用[J]. 全球定位系统, 2019, 44(3): 32-37.
|
| [11] |
ZHAO B, XIONG Y L, XU S G, et al. Using only observation station data for PPP ambiguity resolution by UPD estimation [J]. Advances in space research, 2021, 67(6): 1805-1815. DOI: 10.1016/j.asr.2020.12.033
|
| [12] |
LI B F, GE H B, GE M R, et al. LEO enhanced Global Navigation Satellite System (LeGNSS) for real-time precise positioning services[J]. Advances in space research, 2019, 63(1): 73-93. DOI: 10.1016/j.asr.2018.08.017
|
| [13] |
ZHAO Q, PAN S G, GAO C F, et al. BDS/GPS/LEO triple-frequency uncombined precise point positioning and its performance in harsh environments[J]. Measurement, 2020(151): 107216. DOI: 10.1016/j.measurement.2019.107216
|
| [14] |
KE M X, LV J, CHANG J, et al. Integrating GPS and LEO to accelerate convergence time of precise point positioning[C]//International Conference on Wireless Communications & Signal Processing (WCSP), IEEE, 2015: 1-5. DOI: 10.1109/WCSP.2015.7341230
|
| [15] |
GE H B, LI B F, GE M R, et al. Initial Assessment of precise point positioning with LEO Enhanced Global Navigation Satellite Systems (LeGNSS)[J]. Remote sensing, 2018, 10(7): 984. DOI: 10.3390/rs10070984
|
| [16] |
LI X X, MA F J, LI X, et al. LEO Constellation-augmented multi-GNSS for rapid PPP convergence[J]. Journal of geodesy, 2019, 93(5): 749-764. DOI: 10.1007/s00190-018-1195-2
|
| [17] |
GE H B, LI B F, NIE L W, et al. LEO constellation optimization for LEO Enhanced Global Navigation Satellite System (LeGNSS)[J]. Advances in space research, 2020, 66(3): 520-532. DOI: 10.1016/j.asr.2020.04.031
|
| [18] |
LIU J, HAO J, YANG Y, et al. Design optimization of low earth orbit constellation based on BeiDou Satellite Navigation System precise point positioning[J]. IET radar, sonar & navigation, 2022, 16(8): 1241-1252. DOI: 10.1049/rsn2.12257
|
| [19] |
HONG J, TU R, ZHANG P F, et al. GNSS rapid precise point positioning enhanced by low Earth orbit satellites[J]. Satellite navigation, 2023, 4(1): 1-13. DOI: 10.1186/s43020-023-00100-x
|
| [20] |
张小红, 李盼, 李星星, 等. 宽巷载波相位模糊度小数偏差时变特性分析[J]. 测绘学报, 2013, 42(6): 798-803.
|
Figures(6) / Tables(3)
Copyright © 2009《 GNSS World of China 》 Editorial Office
Address:84 Jianshe Dong Lu, Muye District, Xinxiang City, Henan Province, ChinaChina Pos:453000Tel:0373-3712411Fax:0373-3052232Email:qqdwxt@126.com
Supported by:
Beijing Renhe Information Technology Co. Ltd



 DownLoad:
DownLoad: