GNSS World of China
GNSS World of China
| Citation: | ZHANG Tao, XIA Maodong, ZHANG Jiayu, ZHU Yongyun, TONG Jinwu. Review of underwater navigation and positioning technology[J]. GNSS World of China, 2022, 47(4): 1-16. doi: 10.12265/j.gnss.2022094

|

| [1] |
游亚戈, 李伟, 刘伟民, 等. 海洋能发电技术的发展现状与前景[J]. 电力系统自动化, 2010, 34(14): 1-12.
|
| [2] |
施伟勇, 王传崑, 沈家法. 中国的海洋能资源及其开发前景展望[J]. 太阳能学报, 2011, 32(6): 913-923.
|
| [3] |
郭建科, 董梦如, 郑苗壮, 等. 海洋命运共同体视域下国际海洋资源战略价值评估理论与方法[J]. 自然资源学报, 2022, 37(4): 985-998.
|
| [4] |
马红, 张庆伟. 习近平关于海洋重要论述的哲学意蕴[J]. 西南林业大学学报(社会科学), 2022, 6(2): 38-42.
|
| [5] |
贾宇, 张平. 习近平海洋经济发展重要论述内涵探析[J]. 大连海事大学学报(社会科学版), 2021, 20(6): 1-7.
|
| [6] |
钟宏伟. 国外水下无人航行器装备与技术现状及展望[J]. 水下无人系统学报, 2017, 25(4): 215-225.
|
| [7] |
刘洋, 陈练, 苏强, 等. 水下无人航行器装备技术发展与作战应用研究[J]. 舰船科学技术, 2020, 42(12): 1-7. DOI: 10.3404/j.issn.1672-7649.2020.12.001
|
| [8] |
冯景祥, 姚尧, 潘峰, 等. 国外水下无人装备研究现状及发展趋势[J]. 舰船科学技术, 2021, 43(12): 1-8.
|
| [9] |
梁益丰, 许江宁, 吴苗, 等. AUV 导航技术概述[J]. 舰船科学技术, 2020, 42(15): 152-156,171.
|
| [10] |
PAULL L, SAEEDI S, SETO M, et al. AUV navigation and localization: a review[J]. IEEE journal of oceanic engineering, 2014, 39(1): 131-149. DOI: 10.1109/JOE.2013.2278891
|
| [11] |
黄玉龙, 张勇刚, 赵玉新. 自主水下航行器导航方法综述[J]. 水下无人系统学报, 2019(3): 232-253. DOI: 10.11993/j.issn.2096-3920.2019.03.002
|
| [12] |
SAEED N, CELIK A, AL-NAFFOURI T Y, et al. Underwater optical wireless communications, networking, and localization: a survey[J]. Ad hoc networks, 2019(94): 101935. DOI: 10.1016/j.adhoc.2019.101935
|
| [13] |
韩孟祥. 基于蓝绿激光的高速水下无线通信实验研究[D]. 北京: 北京邮电大学, 2019.
|
| [14] |
尹伟伟, 郭士荦. 非卫星水下导航定位技术综述[J]. 舰船电子工程, 2017, 37(3): 8-11. DOI: 10.3969/j.issn.1672-9730.2017.03.003
|
| [15] |
王轲, 周兴华, 唐秋华, 等. 水下导航定位技术在大洋科考调查中的应用[J]. 海洋测绘, 2021, 41(4): 65-69. DOI: 10.3969/j.issn.1671-3044.2021.04.014
|
| [16] |
严恭敏, 翁浚. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019: 78.
|
| [17] |
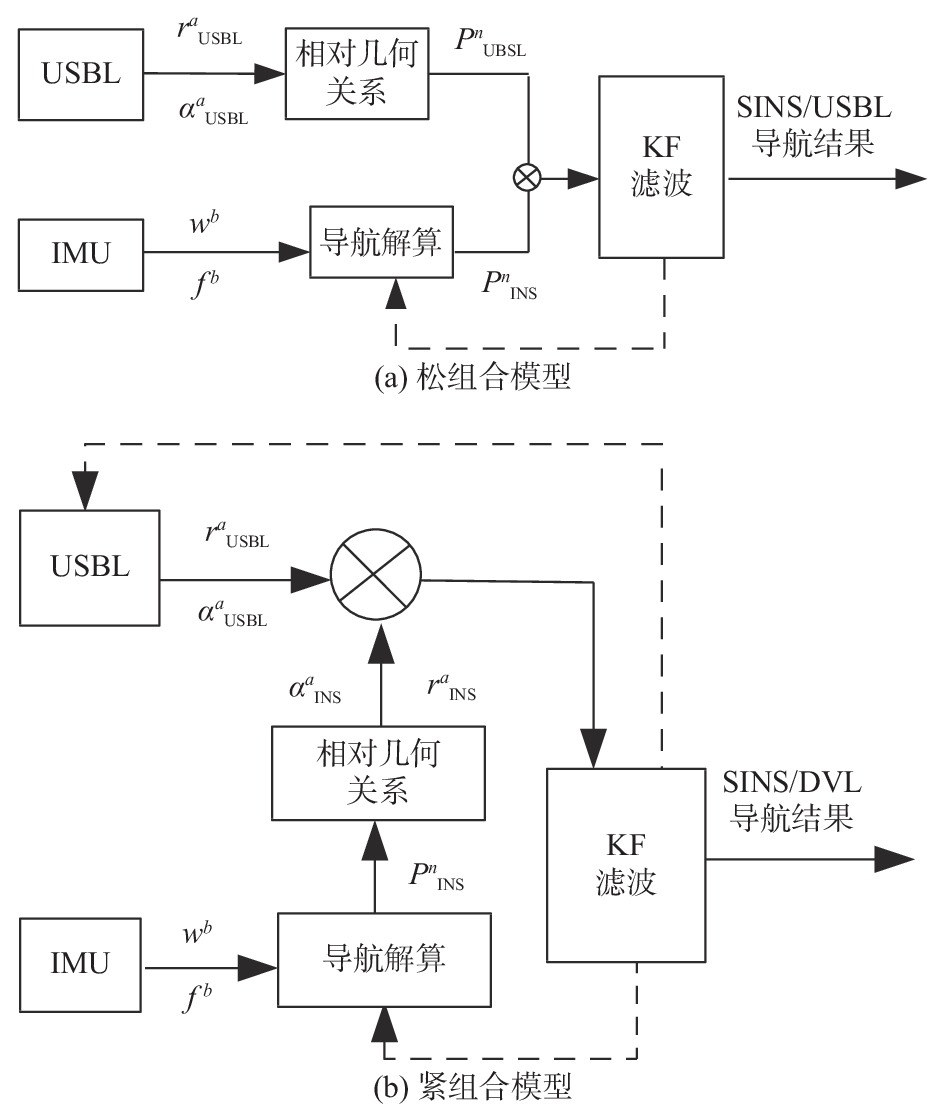
王健, 鲁金瑞, 郑栋, 等. 水下复杂环境下基于SINS/USBL/DVL多源信息融合的组合导航算法[J]. 导航定位与授时, 2022, 9(1): 76-84. DOI: 10.19306/j.cnki.2095-8110.2022.01.009
|
| [18] |
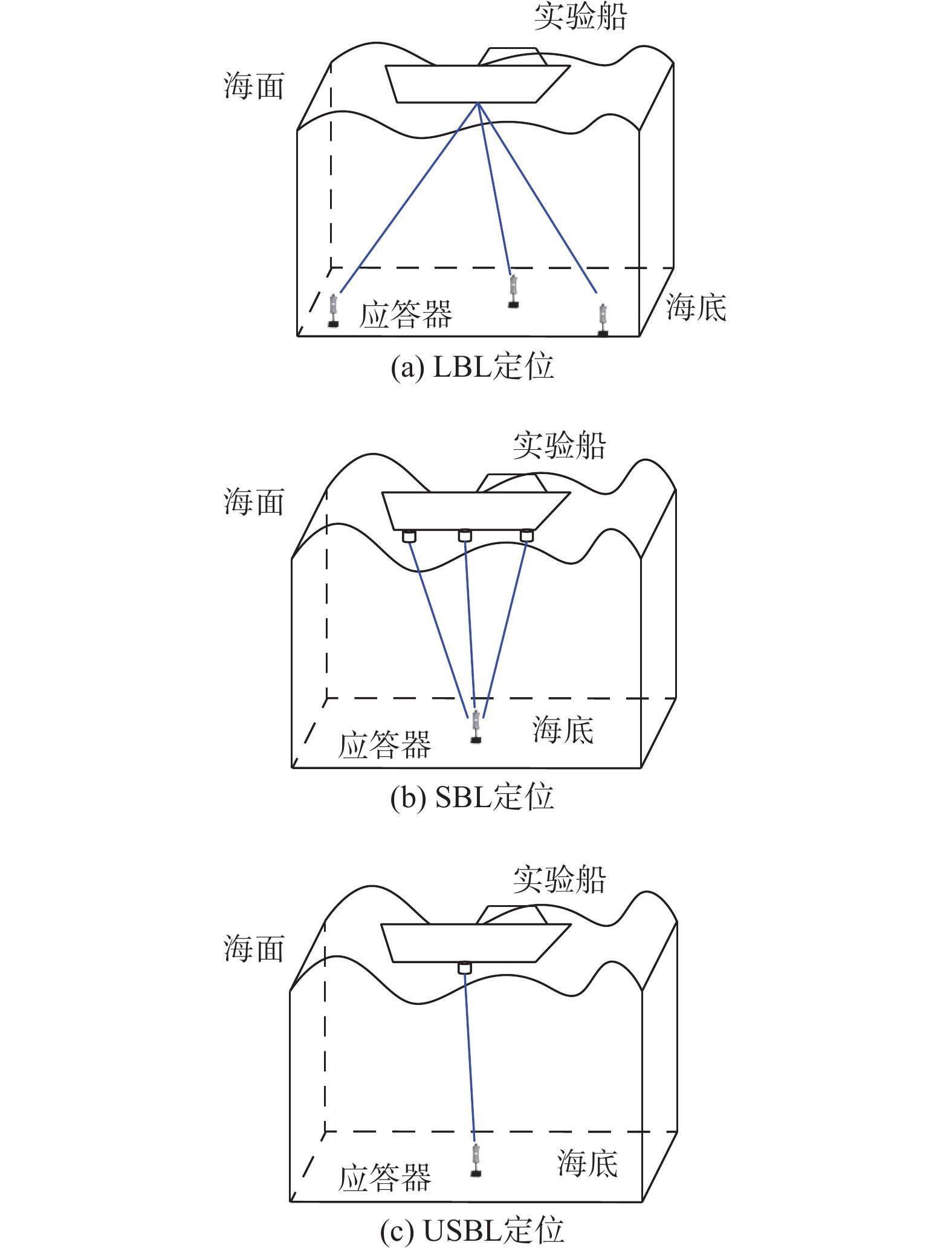
孙大军, 郑翠娥, 张居成, 等. 水声定位导航技术的发展与展望[J]. 中国科学院院刊, 2019, 34(3): 331-338. DOI: 10.3969/j.issn.2095-4999.2022.02.001
|
| [19] |
童金武, 徐晓苏, 张涛, 等. 超短基线安装误差对定位精度影响分析及其标定技术研究[J]. 导航定位与授时, 2020, 7(2): 18-27.
|
| [20] |
张涛, 翁铖铖, 李默涵, 等. 一种SINS/超短基线组合定位系统安装误差标定算法[J]. 中国惯性技术报, 2019, 27(3): 349-356.
|
| [21] |
陆一, 魏东岩, 纪新春, 等. 地磁定位方法综述[J]. 导航定位与授时, 2022, 9(2): 118-130. DOI: 10.19306/j.cnki.2095-8110.2022.02.015
|
| [22] |
王汝鹏. AUV地形匹配导航初始定位研究[D]. 哈尔滨工程大学, 2019.
|
| [23] |
WANG H B, WU L, CHAI H, et al. Technology of gravity aided inertial navigation system and its trial in South China Sea[J]. IET radar, sonar and navigation, 2016, 10(5): 862-869. DOI: 10.1049/iet-rsn.2014.0419
|
| [24] |
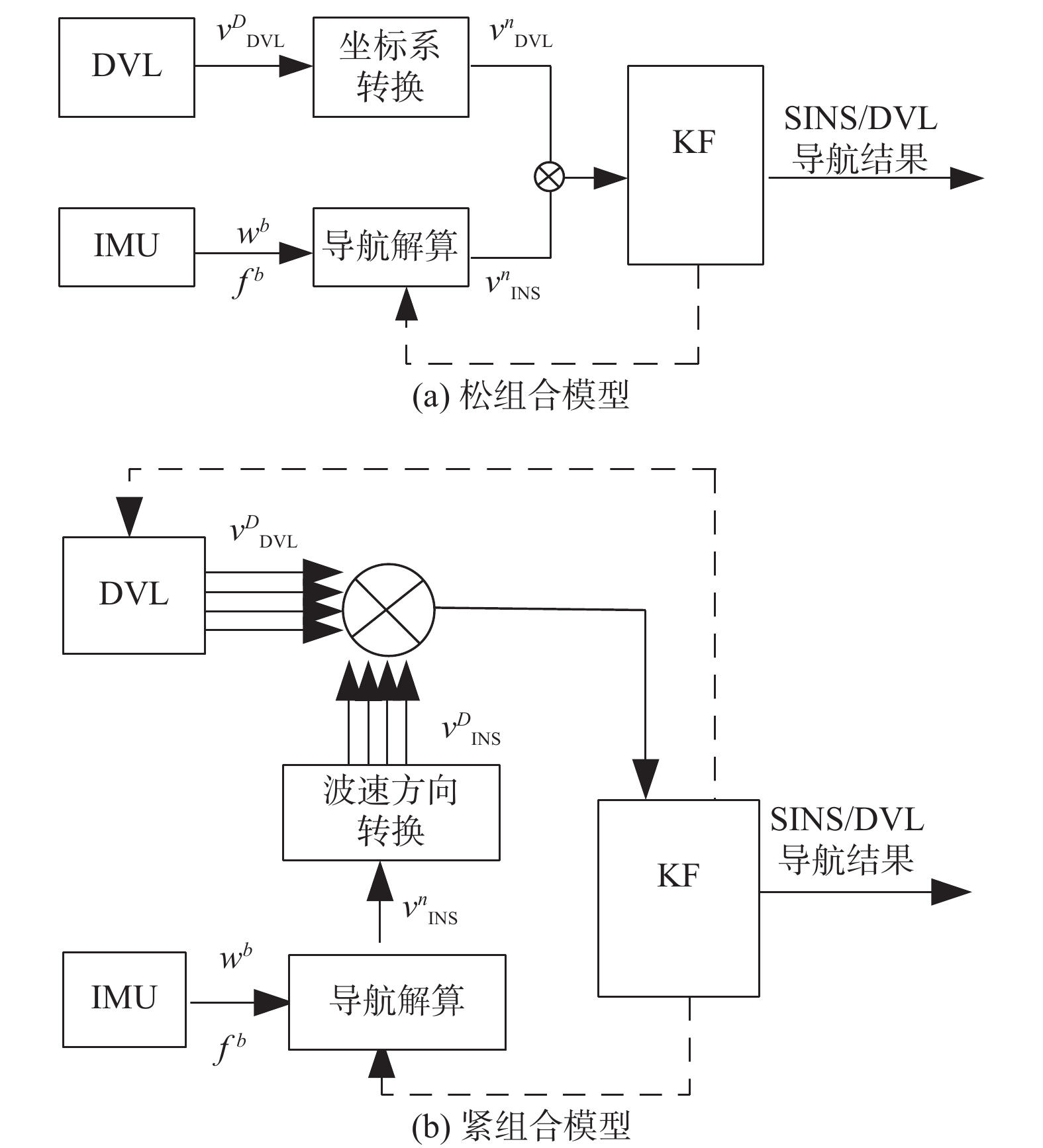
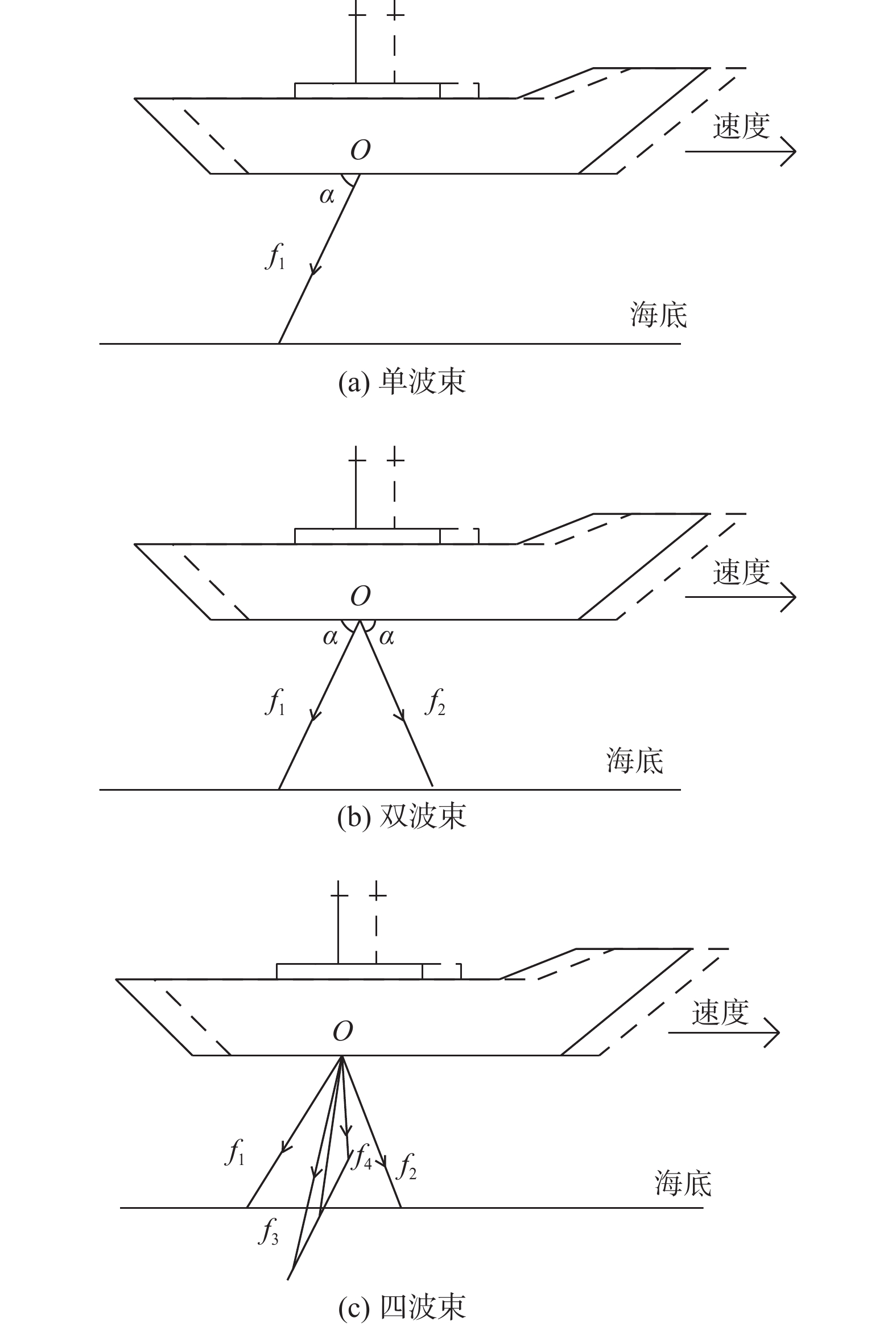
靳凯迪, 柴洪洲, 宿楚涵, 等. DVL/SINS组合导航技术发展现状及趋势[J]. 导航定位学报, 2022, 10(2): 1-12,92.
|
| [25] |
王博, 刘泾洋, 刘沛佳. SINS/DVL组合导航技术综述[J]. 导航定位学报, 2020, 8(3): 1-6,22. DOI: 10.3969/j.issn.2095-4999.2020.03.001
|
| [26] |
CHANG L B, LI Y, XUE B Y. Initial alignment for a doppler velocity log-aided strapdown inertial navigation system with limited information[J]. IEEE/ASME transactions on mechatronics, 2017, 22(1): 329-338. DOI: 10.1109/TMECH.2016.2616412
|
| [27] |
LI W L, LING Y, ZHANG L D, et al. A robust method for alignment calibration of an inertial measurement unit(imu) and doppler sensors[J]. Lasers in engineering, 2016, 34(1): 93-106.
|
| [28] |
LI W L, WU W Q, WANG J L, 等. A novel backtracking navigation scheme for autonomous underwater vehicles[J]. Measurement, 2014 (47): 496-504. DOI: 10.1016/j.measurement.2013.09.022
LI W L, WU W Q, WANG J L, et al. A novel backtracking navigation scheme for autonomous underwater vehicles[J]. Measurement, 2014(47): 496-504. DOI: 10.1016/j.measurement.2013.09.022
|
| [29] |
LI K, LING Y Y, KAICHEN S. A fast in-motion alignment algorithm for DVL aided SINS[J]. Mathematical problems in engineering, 2014: 1-12. DOI: 10.1155/2014/593692
|
| [30] |
CHANG L B, HU B Q. Robust initial attitude alignment for SINS/DVL[J]. IEEE/ASME transactions on mechatronics, 2018, 23(4): 2016-2021. DOI: 10.1109/TMECH.2018.2834917
|
| [31] |
XU X, GUI J, SUN Y F, et al. A robust in-motion alignment method with inertial sensors and doppler velocity log[J]. IEEE transactions on instrumentation and measurement, 2021(99): 1-1. DOI: 10.1109/TIM.2020.3011873
|
| [32] |
YAO Y Y, XU X S, ZHU Y Y, et al. In-motion coarse alignment method for SINS/DVL with the attitude dynamics[J]. ISA transactions, 2020, 105(6): 377-386. DOI: 10.1016/j.isatra.2020.05.033
|
| [33] |
JOYCE T M. In situ calibration of shipboard ADCPs[J]. Journal of atmospheric and oceanographic technology, 1989, 6(1): 169-172. DOI: 10.1175/1520-0426(1989)006<0169:OISOSA>2.0.CO;2
|
| [34] |
MÜNCHOW A, COUGHRAN C S, HENDERSHOTT M C, et al. Performance and calibration of an acoustic doppler current profiler towed below the surface[J]. Journal of atmospheric and oceanic technology, 1995, 12(5): 435-444. DOI: 10.1175/1520-0426(1995)012<0435:PACOAA>2.0.CO;2
|
| [35] |
KINSEY J C, WHITCOMB L L. Adaptive identification on the group of rigid-body rotations and its application to underwater vehicle navigation[J]. IEEE transactions on robotics, 2007, 23(1): 124-136. DOI: 10.1109/TRO.2006.886829
|
| [36] |
KINSEY J C, WHITCOMB L L. In situ alignment calibration of attitude and doppler sensors for precision underwater vehicle navigation: theory and experiment[J]. IEEE journal of oceanic engineering, 2007, 32(2): 286-299. DOI: 10.1109/JOE.2007.893686
|
| [37] |
KINSEY J C, WHITCOMB L L. Towards in-situ calibration of gyro and Doppler navigation sensors for precision underwater vehicle navigation[C]//IEEE International Conference on Robotics and Automation, 2002. DOI: 10.1109/ROBOT.2002.1014364
|
| [38] |
TANG K H, WANG J L, LI W, et al. A novel INS and doppler sensors calibration method for long range underwater vehicle navigation[J]. Sensors, 2013, 13(11): 14583-14600. DOI: 10.3390/s131114583
|
| [39] |
WANG D, XU X S, YANG Y, et al. A quasi-newton quaternions calibration method for DVL error aided GNSS[J]. IEEE transactions on vehicular technology, 2021, 70(3): 2465-2477. DOI: 10.1109/TVT.2021.3059755
|
| [40] |
朱春云, 庄广琛, 宋雅兰, 等. DVL安装误差角估计方法在水下组合导航系统中的应用[J]. 中国惯性技术学报, 2011, 19(1): 75-78.
|
| [41] |
XU B, WANG L Z, LI S X, et al. A novel calibration method of SINS/DVL integration navigation system based on quaternion[J]. IEEE sensors journal, 2020, 20(16): 9567-9580. DOI: 10.1109/JSEN.2020.2988500
|
| [42] |
TAL A, KLEIN I, KATZ R. Inertial navigation system/doppler velocity log (INS/DVL) fusion with partial DVL measurements[J]. Sensors, 2017, 17(2): 415. DOI: 10.3390/s17020415
|
| [43] |
KARIMI M, BOZORG M, KHAYATIAN A R. A comparison of DVL/INS fusion by UKF and EKF to localize an autonomous underwater vehicle[C]//International Conference on Robotics and Mechatronics, 2013. DOI: 10.1109/ICRoM.2013.6510082
|
| [44] |
GUO Y, WU M P, TANG K H, et al. Square-root unscented information filter and its application in SINS/DVL integrated navigation[J]. Sensors, 2018, 18(7): 1-19. DOI: 10.3390/s18072069
|
| [45] |
GAO W, LI J C, ZHOU G T, et al. Adaptive Kalman filtering with recursive noise estimator for integrated SINS/DVL systems[J]. The journal of navigation, 2015, 68(1): 142-161. DOI: 10.1017/S0373463314000484
|
| [46] |
王宏健, 李村, 么洪飞, 等. 基于高斯混合容积卡尔曼滤波的UUV自主导航定位算法[J]. 仪器仪表学报, 2015, 36(2): 254-261. DOI: 10.19650/j.cnki.cjsi.2015.02.002
|
| [47] |
DAVARI N, GHOLAMI A. An asynchronous adaptive direct Kalman filter algorithm to improve underwater navigation system performance[J]. IEEE sensors journal, 2017, 17(4): 1061-1068. DOI: 10.1109/JSEN.2016.2637402
|
| [48] |
YAO Y Y, XU X S, LI Y, et al. A hybrid IMM based INS/DVL integration solution for underwater vehicles[J]. IEEE transactions on vehicular technology, 2019, 68(6): 5459-5470. DOI: 10.1109/TVT.2019.2910397
|
| [49] |
HOU L H, XU X S, YAO Y Q, et al. An M-estimation-based improved interacting multiple model for INS/DVL navigation method[J]. IEEE sensors journal, 2022, 22(13): 13375-13386. DOI: 10.1109/JSEN.2022.3143316
|
| [50] |
ZHU Y X, CHENG X H, WANG L. A novel fault detection method for an integrated navigation system using gaussian process regression[J]. The journal of navigation, 2016, 1(4): 1-15. DOI: 10.1017/S0373463315001034
|
| [51] |
WANG D, XU X S, YAO Y Y, et al. A novel SINS/DVL tightly integrated navigation method for complex environment[J]. IEEE transactions on instrumentation and measurement, 2020, 69(7): 5183-5196. DOI: 10.1109/TIM.2019.2955187
|
| [52] |
ZHU Y, CHENG X H, HU J, et al. A novel hybrid approach to deal with DVL malfunctions for underwater integrated navigation systems[J]. Applied sciences, 2017, 7(8): 759. DOI: 10.3390/app7080759
|
| [53] |
KANG Y Y, ZHAO L, CHENG J H, et al. A novel grid SINS/DVL integrated navigation algorithm for marine application[J]. Sensors, 2018, 18(2): 364. DOI: 10.3390/s18020364
|
| [54] |
LIU P J, WANG B, DENG Z H, et al. INS/DVL/PS tightly coupled underwater navigation method with limited DVL measurements[J]. IEEE sensors journal, 2018, 18(7): 2994-3002. DOI: 10.1109/JSEN.2018.2800165
|
| [55] |
孙大军, 郑翠娥, 钱洪宝, 等. 水声定位系统在海洋工程中的应用[J]. 声学技术, 2012, 31(2): 125-132. DOI: 10.3969/j.issn1000-3630.2012.02.003
|
| [56] |
金博楠, 徐晓苏, 张涛, 等. 超短基线定位技术及在海洋工程中的应用[J]. 导航定位与授时, 2018, 5(4): 8-20.
|
| [57] |
唐秋华, 吴永亭, 丁继胜, 等. 超短基线声学定位系统的校准技术研究[J]. 声学技术, 2006, 25(4): 281-287. DOI: 10.3969/j.issn.1000-3630.2006.04.003
|
| [58] |
郑翠娥, 孙大军, 张殿伦, 等. 超短基线定位系统安装误差校准技术研究[J]. 计算机工程与应用, 2007, 43(8): 171-173. DOI: 10.3321/j.issn:1002-8331.2007.08.054
|
| [59] |
郑翠娥, 孙大军, 张殿伦, 等. 超短基线声学定位系统安装误差精确校准[J]. 哈尔滨工程大学学报, 2007, 28(8): 894-898. DOI: 10.3969/j.issn.1006-7043.2007.08.012
|
| [60] |
CHEN H H. In-situ alignment calibration of attitude and ultrashort baseline sensors for precision underwater positioning[J]. Ocean engineering, 2008, 35(14): 1448-1462. DOI: 10.1016/j.oceaneng.2008.06.013
|
| [61] |
CHEN H H. The estimation of angular misalignments for ultra short baseline navigation systems. part I: numerical simulations[J]. Journal of navigation, 2013, 66(4): 561-578. DOI: 10.1017/S0373463313000222
|
| [62] |
CHEN H H. The estimation of angular misalignments for ultra short baseline navigation systems. part II: experimental results[J]. Journal of navigation, 2013, 66(5): 773-787. DOI: 10.1017/S0373463313000234
|
| [63] |
TONG J W, XU X X, ZHANG T. Study on installation error analysis and calibration of acoustic transceiver array based on SINS/USBL integrated system[J]. IEEE access, 2018(6): 66923-66939. DOI: 10.1109/ACCESS.2018.2878756
|
| [64] |
ZHU Y Y, ZHANG T, XU S Q, et al. A calibration method of USBL installation error based on attitude determination[J]. IEEE transactions on vehicular technology, 2020, 69(8): 8317-8328. DOI: 10.1109/TVT.2020.2995599
|
| [65] |
ZHANG L, ZHANG T, TONG J W, et al. A calibration method of ultrashort baseline installation error with large misalignment based on variational bayesian unscented Kalman filter[J]. Review of scientific instruments, 2020, 90(5): 055003. DOI: 10.1063/1.5088688
|
| [66] |
ZHAO L, KANG Y Y, CHENG J H, et al. A fault-tolerant polar grid SINS/DVL/USBL integrated navigation algorithm based on the centralized filter and relative position measurement[J]. Sensors, 2019, 19(18): 3899. DOI: 10.3390/s19183899
|
| [67] |
LEE P M, JUN B H, KIM K H, et al. Simulation of an inertial acoustic navigation system with range aiding for an autonomous underwater vehicle[J]. IEEE journal of oceanic engineering, 2007, 32(2): 327-345. DOI: 10.1109/JOE.2006.880585
|
| [68] |
李守军, 陶春辉, 包更生. 基于卡尔曼滤波的INS/USBL水下导航系统模型研究[J]. 海洋技术, 2008, 27(3): 47-50. DOI: 10.3969/j.issn.1003-2029.2008.03.013
|
| [69] |
GENG Y R, SOUSA J B D. Hybrid derivative-free EKF for USBL/INS tightly-coupled integration in AUV[C]//International Conference on Autonomous and Intelligent Systems, 2010. DOI: 10.1109/AIS.2010.5547035
|
| [70] |
MORGADO M, OLIVEIRA P, SILVESTRE C. Tightly coupled ultrashort baseline and inertial navigation system for underwater vehicles: an experimental validation[J]. Journal of field robotics, 2013, 30(1): 142-170. DOI: 10.1002/rob.21442
|
| [71] |
MORGADO M, OLIVERIA P, SILVESTRE C, et al. USBL/INS tightly-coupled integration technique for underwater vehicles[C]// International Conference on Information Fusion, 2006. DOI: 10.1109/ICIF.2006.301607
|
| [72] |
MORGADO M, OLIVEIRA P, SILVESTRE C, et al. Embedded vehicle dynamics aiding for USBL/INS underwater navigation system[J]. IEEE transactions on control systems technology, 2013, 22(1): 322-330. DOI: 10.1109/TCST.2013.2245133
|
| [73] |
ZHANG L, ZHANG T, WEI H Y. A novel robust inertial and ultra-short baseline integrated navigation strategy under the influence of motion effect[C]//IEEE Transactions on Intelligent Transportation Systems, 2022: 1-12. DOI: 10.1109/TITS.2022.3168442
|
| [74] |
陈磊. 复杂海洋噪声环境下近场源定位算法的仿真分析[D]. 长春: 吉林大学, 2015.
|
| [75] |
车永刚, 张宁川, 赵宝庆. 几种经典海洋环境噪声谱分析[J]. 海洋测绘, 2014, 34(5): 46-49. DOI: 10.3969/j.issn.1671-3044.2014.05.012
|
| [76] |
XIA M D, ZHANG T, WANG J, et al, The fine calibration of the ultra-short baseline system with inaccurate measurement noise covariance matrix[C]// IEEE Transactions on Instrumentation and Measurement, 2022. DOI: 10.1109/TIM.2021.3132351
|
| [77] |
XU B, ZHANG J, RAZZAQI A A. A novel robust filter for outliers and time-varying delay on an SINS/USBL integrated navigation model[J]. Measurement science and technology, 2021, 32(1): 1-15. DOI: 10.1088/1361-6501/abaae9
|
| [78] |
WANG J, ZHANG T, JIN B N, et al. Student's t-Based robust Kalman filter for a SINS/USBL integration navigation strategy[J]. IEEE sensors journal, 2020, 20(10): 5540-5553. DOI: 10.1109/JSEN.2020.2970766
|
| [79] |
ZHANG T, WANG J, ZHANG L, et al. Student's t-based measurement uncertainty filter for SINS/USBL tightly integration navigation system[J]. IEEE transactions on vehicular technology, 2021, 70(9): 8627-8638. DOI: 10.1109/TVT.2021.3102085
|
| [80] |
GAO W, ZHAO B, G. ZHOU G T, et al. Improved artificial bee colony algorithm based gravity matching navigation method[J]. Sensors, 2014, 14(7): 12968-12989. DOI: 10.3390/s140712968
|
| [81] |
SANDELL D T, MULLER R D, SMITH W H F, et al. New global marine gravity model from CryoSat-2 and Jason-1 reveals buried tectonic structure[J]. Science, 2014, 346(6205): 65-67. DOI: 10.1126/science.1258213
|
| [82] |
HARLAN R B. Eotvoes corrections for airborne gravimetry[J]. Marine geophysical research, 1968, 73(14): 4675-4769. DOI: 10.1029/JB073i014p04675
|
| [83] |
SMOLLER Y L, YURIST S S, GOLOVAN A A, et al. Using a multi antenna GPS receiver in the airborne gravimeter GT-2a for surveys in polar areas[J]. Gyroscopy navigation, 2015, 6(4): 299-304. DOI: 10.1134/S2075108715040100
|
| [84] |
OUYANG Y Z, DENG K L, LU X P, et al. Tests of multi-type airborne gravimeters and data analysis[J] Hydrographic surveying charting, 2013, 33(4): 6-11. DOI: 10.1002/adma.201301232
|
| [85] |
WAN X Y, RAN J J, JIN S G. Sensitivity analysis of gravity anomalies and vertical gravity gradient data for bathymetry inversion[J]. Marine geophysical research, 2019, 40(1): 87-96. DOI: 10.1007/s11001-018-9361-8
|
| [86] |
WAN X Y, YU J H, LIANG L, et al. Analysis of limitations on recovery of gravity field based on satellite gravity gradient data[J]. Geodesy and geodynamics, 2021, 12(1): 31-42. DOI: 10.1016/j.geog.2020.11.005
|
| [87] |
YUAN Y, GAO J Y, WU Z C, et al. Performance estimate of some prototypes of inertial platform and strapdown marine gravimeters[J]. Earth planets and space, 2020, 72(1): 72: 89. DOI: 10.1186/s40623-020-01219-w
|
| [88] |
张京娟, 刘繁明, 郝燕玲. 重力场的克立格估值研究[J]. 哈尔滨工程大学学报, 2003, 24(3): 249-252. DOI: 10.3969/j.issn.1006-7043.2003.03.004
|
| [89] |
徐遵义, 姜玉祥, 赵亮, 等. 改进的 Shepard 算法及其在重力异常插值中的应用[J]. 武汉大学学报(信息科学版), 2010, 35(4): 477-480.
|
| [90] |
王博, 周明龙. 水下重力辅助导航适配区选取的研究进展[J]. 导航定位学报, 2020, 8(3): 32-39. DOI: 10.3969/j.issn.2095-4999.2020.03.005
|
| [91] |
张驰, 李姗姗, 邢志斌, 等. 多特征值分析的重力辅助导航适配区选择方法[J]. 测绘科学技术学报, 2019, 36(1): 28-33.
|
| [92] |
张璐, 武凛, 柴华, 等. 一种新的基于特征值融合的重力辅助导航适配区选择方法[J]. 导航与控制, 2018, 17(2): 32-40. DOI: 10.3969/j.issn.1674-5558.2018.02.005
|
| [93] |
WANG B, ZHU Y W, DENG Z H, et al. The Gravity matching area selection criteria for underwater gravity-aided navigation application based on the comprehensive characteristic parameter[J]. IEEE/ASME transactions on mechatronics, 2016, 21(6): 2935-2943. DOI: 10.1109/TMECH.2016.2587804
|
| [94] |
马越原, 欧阳永忠, 曲政豪, 等. 基于模糊决策理论的重力辅助导航区域选择方法[J]. 海洋测绘, 2016, 36(6): 7-10. DOI: 10.3969/j.issn.1671-3044.2016.06.002
|
| [95] |
文超斌, 王跃钢, 郭志斌, 等. 基于重力辅助导航误差分析的自适应介入匹配算法[J]. 中国惯性技术学报, 2014, 22(4): 514-518.
|
| [96] |
宫京, 张崇猛, 周贤高, 等. 一种基于因子分析的重力适配区域选取方法[J]. 中国惯性技术学报, 2019, 27(6): 732-737.
|
| [97] |
WANG B, ZHOU M L, DENG Z H, et al. Sum vector-difference-based matching area selection method for underwater gravity-aided navigation[J]. IEEE access, 2019(7): 123616-123624. DOI: 10.1109/ACCESS.2019.2938413
|
| [98] |
WANG C L, WANG B, DENG Z H, et al. A delaunay triangulation-based matching area selection algorithm for underwater gravity-aided inertial navigation[J]. IEEE/ASME transactions on mechatronics, 2020, 26(2): 908-917. DOI: 10.1109/TMECH.2020.3012499
|
| [99] |
周凌. 基于相关序列匹配的重力辅助导航算法精度研究[D]. 北京: 中国地质大学, 2021.
|
| [100] |
HAN Y R, WANG B, DENG Z H, et al. A combined matching algorithm for underwater gravity-aided navigation[J]. IEEE/ASME transactions on mechatronics, 2018, 23(1): 233-241. DOI: 10.1109/TMECH.2017.2774296
|
| [101] |
张静远, 徐振烊, 王新鹏. 基于TERCOM算法的水下地形辅助导航误差研究[J]. 海军工程大学学报, 2020, 32(5): 44-49.
|
| [102] |
ZHAO L, GAO N, HUANG B Q, et al. A novel terrain-aided navigation algorithm combined with the TERCOM algorithm and particle filter[J]. IEEE sensors journal, 2014, 15(2): 1124-1131. DOI: 10.1109/JSEN.2014.2360916
|
| [103] |
HAN Y, WANG B, DENG Z H, et al. An improved TERCOM-based algorithm for gravity-aided navigation[J]. IEEE sensors journal, 2016, 16(8): 2537-2544. DOI: 10.1109/JSEN.2016.2518686
|
| [104] |
LIU M Q, WANG B, DENG Z H, et al. Improved ICCP algorithm and its application in gravity matching aided inertial navigation system[C]//The 33rd Chinese Control Conference, 2014. DOI: 10.1109/ChiCC.2014.6896685
|
| [105] |
DENG Z H, LI C, YIN L J, et al. An adaptive robust unscented Kalman filter based matching algorithm for underwater gravity aided navigation[C]// IEEE CSAA Guidance, Navigation and Control Conference(CGNCC), 2018. DOI: 10.1109/GNCC42960.2018.9018670
|
| [106] |
欧阳明达, 孙艺轩, 邝英才, 等. 应用抗差估计SITAN算法的水下重力匹配导航方法[J]. 中国惯性技术学报, 2021, 29(2): 214-220. DOI: 10.13695/j.cnki.12-1222/o3.2021.02.011
|
| [107] |
WANG Z, HUANG Y L, WANG M S, et al. A computationally efficient outlier-robust cubature kalman filter for underwater gravity matching navigation[J]. IEEE transactions on instrumentation and measurement, 2022(71): 1-18. DOI: 10.1109/TIM.2022.3141153
|
| [108] |
WANG B, ZHU J W, MA Z X, et al. Improved particle filter-based matching method with gravity sample vector for underwater gravity-aided navigation[J]. IEEE transactions on industrial electronics, 2021, 68(6): 5206-5216. DOI: 10.1109/TIE.2020.2988227
|
| [109] |
李鑫. 地磁辅助匹配定位关键技术研究[D]. 长春: 吉林大学, 2018.
|
| [110] |
吴志添. 面向水下地磁导航的地磁测量误差补偿方法研究[D]. 长沙: 国防科学技术大学, 2013.
|
| [111] |
杨云涛, 石志勇, 关贞珍, 等. 地磁场在导航定位系统中的应用[J]. 中国惯性技术学报, 2007, 15(6): 686-692. DOI: 10.3969/j.issn.1005-6734.2007.06.012
|
| [112] |
周军, 葛致磊, 施桂国. 地磁导航发展与关键技术[J]. 宇航学报, 2008, 29(5): 1467-1471. DOI: 10.3873/j.issn.1000-1328.2008.05.001
|
| [113] |
GEBRE-EGZIABHER D, ELKAIM G H, POWELL J D, et al. A non-linear two-step estimation algorithm for calibrating solid-state strapdown magnetometers[C]//The 8th International St. Petersburg Conference on Navigation Systems, 2001: 290-297.
|
| [114] |
ALONSO R, SHUSTER M D. Attitude-independent magnetometer -bias determination: a survey[J]. The journal of the astronautical sciences, 2002, 50(4): 453-475. DOI: 10.1007/BF03546248
|
| [115] |
CRASSIDIS J L, LAI K-L, HARMAN R R. Real-Time attitude-independent three-axis magnetometer calibration[J]. Journal of guidance control and dynamics, 2012, 28(1): 115-120. DOI: 10.2514/1.6278
|
| [116] |
GEBRE-EGZIABHER D. Magnetometer autocalibration leveraging measurement locus constraints[J]. Journal of aircraft, 2007, 44(4): 1361-1368. DOI: 10.2514/1.27118
|
| [117] |
李青竹, 李志宁, 张英堂, 等. 基于椭球拟合的磁梯度张量系统集成校正[J]. 中国惯性技术学报, 2018, 26(2): 187-195.
|
| [118] |
于向前, 刘斯, 肖池阶. 基于椭球拟合的三轴磁强计两步校准法[J]. 仪表技术与传感器, 2021(4): 52-56. DOI: 10.3969/j.issn.1002-1841.2021.04.011
|
| [119] |
迟铖, 王丹, 吕俊伟, 等. 基于粒子群遗传算法的三轴磁通门误差校正[J]. 探测与控制学报, 2021, 43(3): 98-102.
|
| [120] |
罗建刚, 张峰, 刘静晓, 等. 基于遗传算法的矢量磁测量非对准误差校正[J]. 探测与控制学报, 2021, 43(4): 51-57.
|
| [121] |
周贤高, 李士心, 杨建林, 等. 地磁匹配导航中的特征区域选取[J]. 中国惯性技术学报, 2008, 16(6): 694-698.
|
| [122] |
王哲, 王仕成, 张金生, 等. 一种基于层次分析法的地磁匹配制导适配性评价方法[J]. 宇航学报, 2009, 30(5): 1871-1878. DOI: 10.3873/j.issn.1000-1328.2009.05.021
|
| [123] |
吕云霄, 吴美平, 胡小平. 基于支持向量机的地磁辅助导航匹配区域选取准则[J]. 兵工自动化, 2011, 30(1): 49-52. DOI: 10.3969/j.issn.1006-1576.2011.01.016
|
| [124] |
朱占龙, 李晶. WPM方法分析地磁图指标权重灵敏度[J]. 计算机工程与应用, 2017, 53(13): 60-65. DOI: 10.3778/j.issn.1002-8331.1702-0027
|
| [125] |
王鹏, 吴美平, 阮晴, 等. 多属性决策方法在地磁图适配性分析中的应用[J]. 兵工自动化, 2011, 30(8): 65-68. DOI: 10.3969/j.issn.1006-1576.2011.08.019
|
| [126] |
陈有荣, 袁建平. 基于分形维数的地磁图适配性研究[J]. 飞行力学, 2009, 27(6): 76-79.
|
| [127] |
赵建虎, 王胜平, 王爱学. 基于地磁共生矩阵的水下地磁导航适配区选择[J]. 武汉大学学报(信息科学版), 2011, 36(4): 446-449.
|
| [128] |
张凯, 赵建虎, 王锲. 基于支持向量机的水下地形匹配导航中适配区划分方法研究[J]. 大地测量与地球动学, 2013, 33(6): 72-77.
|
| [129] |
肖晶, 齐晓慧, 段修生, 等. 基于深度卷积神经网络的地磁导航方向适配性分析[J]. 工程科学学报, 2017, 39(10): 1584-1590.
|
| [130] |
种洋, 柴洪洲, 常宜峰, 等. 自组织优化分类的AUV地磁导航适配区选取[J]. 武汉大学学报(信息科学版), 2022, 47(5): 722-730.
|
| [131] |
孙晓洁, 寇军, 张笑楠, 等. 地磁导航技术研究进展[J]. 导航与控制, 2016, 15(6): 1-6. DOI: 10.3969/j.issn.1674-5558.2016.06.001
|
| [132] |
谢仕民, 李邦清, 李文耀, 等. 地磁匹配技术及其基本匹配算法仿真研究[J]. 航天控制, 2008, 26(5): 55-59.
|
| [133] |
GUO C F, CAI H, HEIJDEN G H M. Feature extraction and geomagnetic matching[J]. Journal of navigation, 2013, 66(6): 799-811. DOI: 10.1017/S0373463313000490
|
| [134] |
LIN Y, YAN L, TONG Q X. Underwater geomagnetic navigation based on ICP algorithm[C]//IEEE International Conference on Robotics and Biomimetics, 2007. DOI: 10.1109/ROBIO.2007.4522496
|
| [135] |
LI M, LIU Y, XIAO L P. Performance of the ICCP algorithm for underwater navigation[C]//International Conference on Mechatronics and Control, 2014. DOI: 10.1109/ICMC.2014.7231579
|
| [136] |
SONG Z G, ZHANG J S, ZHU W Q, et al. The vector matching method in geomagnetic aiding navigation[J]. Sensors, 2016, 16(7): 1120-1132. DOI: 10.3390/s16071120
|
| [137] |
WANG H B, XU X S, ZHANG T. Multipath parallel ICCP underwater terrain matching algorithm based on multibeam bathymetric data[J]. IEEE access, 2018(6): 48708-48715. DOI: 10.1109/ACCESS.2018.2866687
|
| [138] |
HAGEN O K, ÅNONSEN K B. Using terrain navigation to improve marine vessel navigation systems[J]. Marine technology society journal, 2014, 48(2): 45-58. DOI: 10.4031/MTSJ.48.2.6
|
| [139] |
CARLSTROM J, NYGREN I. Terrain navigation of the swedish AUV62F vehicle[C]//International Symposium Unmanned Untethered Submersible Technol, 2005: 1-10. DOI: ConferenceArticle/5aeqa3f8c095d712542967b5
|
| [140] |
NYGREN I. Robust and efficient terrain navigation of underwater vehicles[C]//Position, Location and Navigation Symposium, 2008. DOI: 10.1109/PLANS.2008.4570034
|
| [141] |
CARRENO S, WILSON P, RIDAO P, et al. A survey on terrain based navigation for AUVs[C]. Oceans 2010 MTS/IEEE Seattle, 2010. DOI: 10.1109/OCEANS.2010.5664372
|
| [142] |
NAKATANI T, URA T, ITO Y, et al. AUV “TUNA-SAND” and its exploration of hydrothermal vents at Kagoshima Bay[C]//Oceans 2008 MTS/IEEE Kobe Techno-Ocean, 2008. DOI: 10.1109/OCEANSKOBE.2008.4531099
|
| [143] |
MEDUNA D K, ROCK S M, MCEWEN R S. Closed-loop terrain relative navigation for AUVs with non-inertial grade navigation sensors[C]//Autonomous Underwater Vehicles, 2011. DOI: 10.1109/AUV.2010.5779659
|
| [144] |
张静远, 谌剑, 李恒, 等. 水下地形辅助导航技术的研究与应用进展[J]. 国防科技大学学报, 2015, 37(3): 128-135. DOI: 10.11887/j.cn.201503021
|
| [145] |
宋帅, 周勇, 张坤鹏, 等. 高精度和高分辨率水下地形地貌探测技术综述[J]. 海洋开发与管理, 2019, 36(6): 74-79. DOI: 10.3969/j.issn.1005-9857.2019.06.017
|
| [146] |
李海森, 魏波, 杜伟东. 多波束合成孔径声呐技术研究进展[J]. 测绘学报, 2017, 46(10): 1760-1769. DOI: 10.11947/j.AGCS.2017.20170410
|
| [147] |
李海森, 周天, 徐超. 多波束测深声纳技术研究新进展[J]. 声学技术, 2013, 32(2): 73-80.
|
| [148] |
冯晓晨, 葛彤, 王小丹. 基于神经网络的水下对接引导算法[J]. 舰船科学技术, 2021, 43(17): 102-107.
|
| [149] |
DUNÍK J, SOTÁK M, VESELÝ M, et al. Design of RAO-blackwellized point-mass filter with application in terrain aided navigation[J]. IEEE transactions on aerospace and electronic systems, 2019, 55(1): 251-272. DOI: 10.1109/TAES.2018.2850210
|
| [150] |
SALAVASIDIS G, MUNAFÒ A, HARRIS C, et al. Terrain-aided navigation for long-endurance and deep-rated autonomous underwater vehicles[J]. Journal of field robotics, 2018, 36(2): 447-474. DOI: 10.1002/rob.21832
|
| [151] |
ZHOU T, PENG D D, XU C, et al. Adaptive particle filter based on kullback-leibler distance for underwater terrain aided navigation with multi-beam sonar[J]. IET radar, sonar & navigation, 2018, 12(4): 433-441. DOI: 10.1049/iet-rsn.2017.0239
|
| [152] |
马腾, 丁硕硕, 范佳佳, 等. 海底地形匹配高效质点滤波导航方法[J]. 数字海洋与水下攻防, 2021, 4(6): 439-445.
|
| [153] |
PENG D D, ZHOU T, FOLKESSON J, et al. Robust particle filter based on Huber function for underwater terrain-aided navigation[J]. IET radar, sonar & navigation, 2019, 13(1): 1867-1875. DOI: 10.1049/iet-rsn.2019.0123
|
Figures(5) / Tables(6)
Copyright © 2009《 GNSS World of China 》 Editorial Office
Address:84 Jianshe Dong Lu, Muye District, Xinxiang City, Henan Province, ChinaChina Pos:453000Tel:0373-3712411Fax:0373-3052232Email:qqdwxt@126.com
Supported by:
Beijing Renhe Information Technology Co. Ltd



 DownLoad:
DownLoad: