GNSS World of China
GNSS World of China
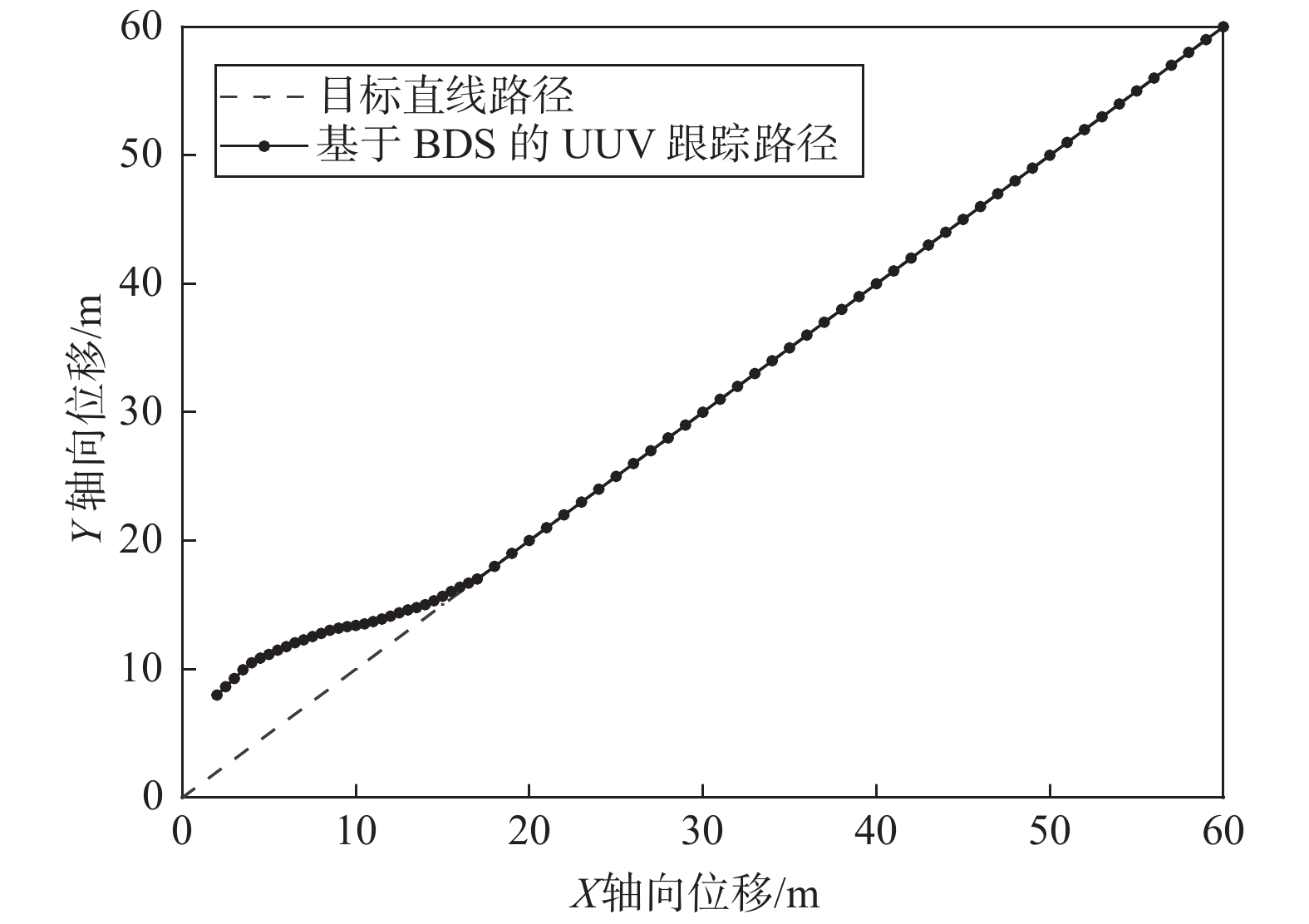
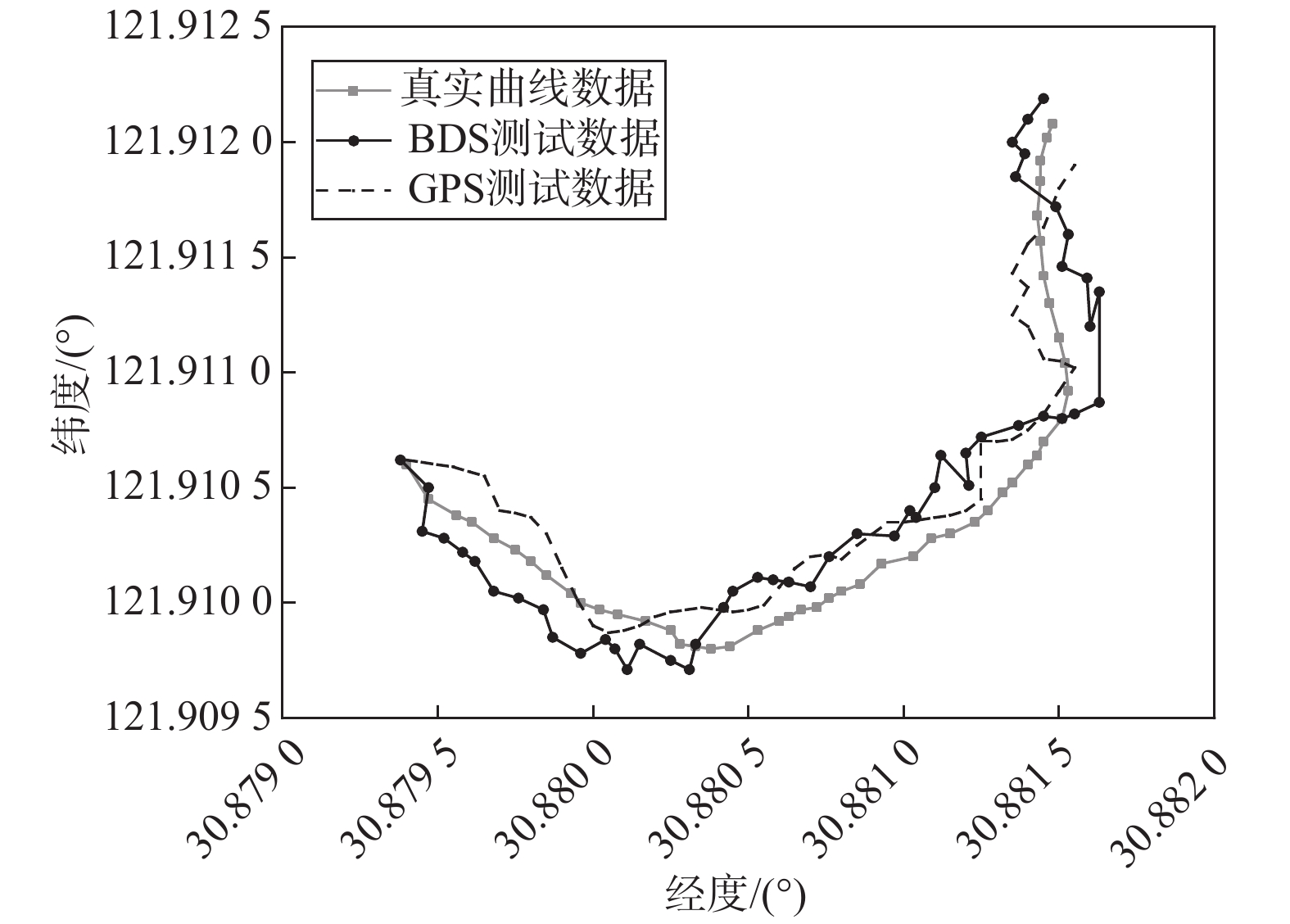
| Citation: | WU Ziyue, LI Eryang, WANG Ru. BDS application of offshore UUV path tracking[J]. GNSS World of China, 2021, 46(2): 98-103. doi: 10.12265/j.gnss.2020112704

|

| [1] |
吴志峰, 吴子岳. 基于GPS/MATLAB的AUV路径优化分析[J]. 计量学报, 2020, 41(8): 927-930.
|
| [2] |
张慧莎. 高动态北斗导航自适应抗干扰技术研究[D]. 南京: 南京理工大学, 2018.
|
| [3] |
王永鼎, 程湘裕. 基于BDS的混合动力船舶节能研究[J]. 全球定位系统, 2020, 45(2): 112-118.
|
| [4] |
姜少杰, 王宪, 刘海敌, 等. 基于GPS/BDS组合的浅海AUV定位性能分析[J]. 全球定位系统, 2018, 43(3): 124-128.
|
| [5] |
崔秀芳, 蔡陈玉, 李志刚. 基于北斗卫星的渔船监控系统设计[J]. 全球定位系统, 2018, 43(3): 119-121.
|
| [6] |
王永鼎, 李华南, 钱莹娟. 北斗卫星导航系统在AUV中的应用[J]. 全球定位系统, 2018, 43(1): 98-99.
|
| [7] |
石祥, 许哲, 何青义. 基于PCI8602的无人水面艇控制系统设计[J]. 测控技术, 2014, 33(12): 77-80, 84. DOI: 10.3969/j.issn.1000-8829.2014.12.021
|
| [8] |
吴子岳, 宋彦良, 吴志峰, 等. 基于GNSS的自主巡航四足机器人及远程监测系统设计[J]. 全球定位系统, 2018, 43(5): 113-115.
|
| [9] |
彭勇, 陈俞强. 基于改进卡尔曼滤波的北斗GPS联合定位算法[J]. 计算技术与自动化, 2018, 37(2): 59-62.
|
| [10] |
杜涓, 陈家林. 基于STM32的移动机器人自适应跟踪系统设计[J]. 自动化与仪表, 2020, 35(11): 44-48.
|
| [11] |
陈钊, 黄凤辰, 花再军. 北斗卫星通信在远程自动气象站中的应用[J]. 工业控制计算机, 2016, 29(10): 60-61. DOI: 10.3969/j.issn.1001-182X.2016.10.027
|
| [12] |
刘飞, 林琳, 徐文江. 基于北斗RDSS的监视数据传输技术研究[J]. 信息技术, 2020, 44(01): 15-19.
|

Figures(7) / Tables(2)
Copyright © 2009《 GNSS World of China 》 Editorial Office
Address:84 Jianshe Dong Lu, Muye District, Xinxiang City, Henan Province, ChinaChina Pos:453000Tel:0373-3712411Fax:0373-3052232Email:qqdwxt@126.com
Supported by:
Beijing Renhe Information Technology Co. Ltd



 DownLoad:
DownLoad: