

Real-time orbit determination of Beidou satellite based on square root information filtering
-
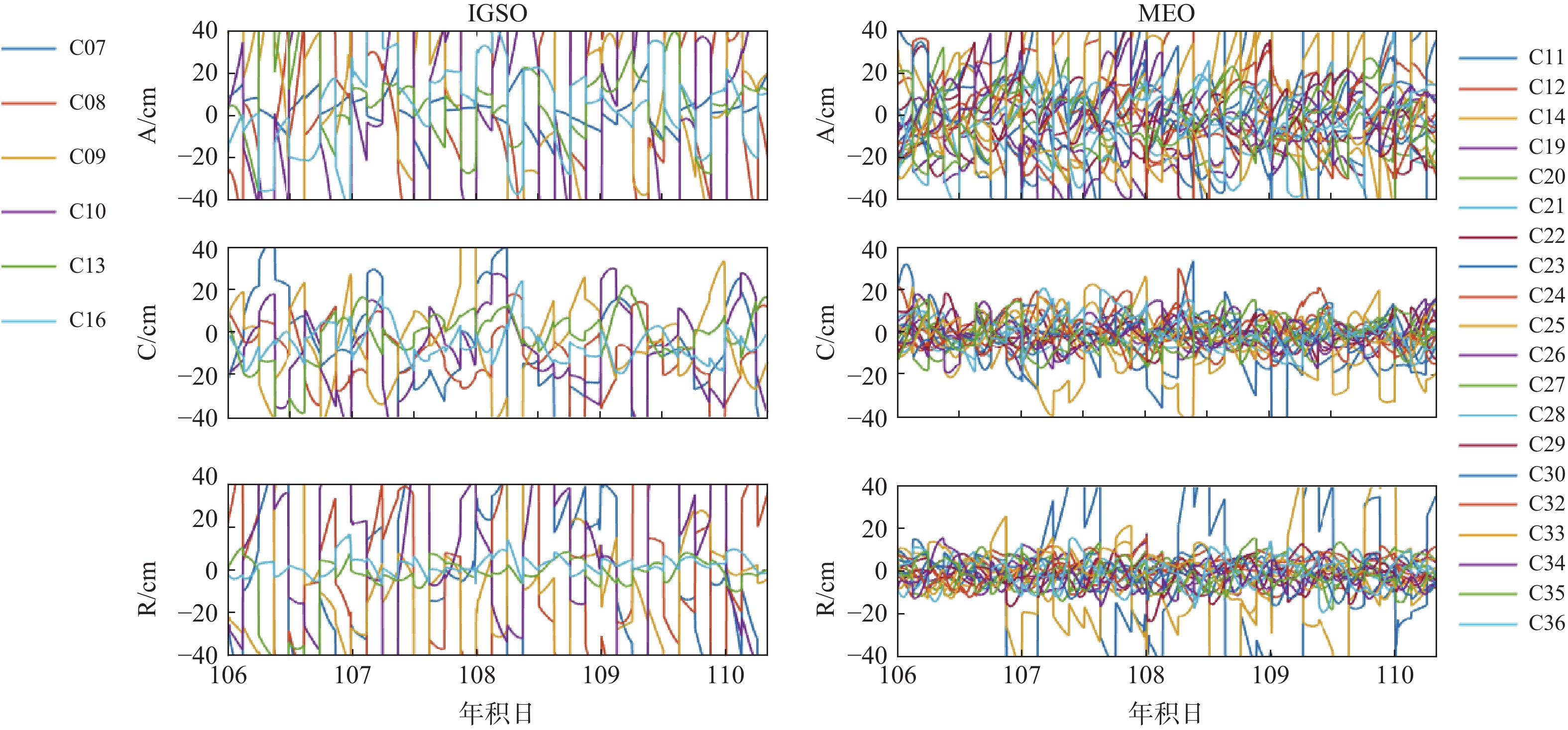
摘要: 连续、稳定、高精度的实时卫星轨道产品是北斗国际化、规模化、智能化应用的重要前提. 当前,北斗卫星导航系统(BDS)的实时精密轨道产品多基于“批处理解算+轨道预报”的超快速模式获得,存在连续性较差、稳定性较低、精度不高等问题. 为此,本文采用平方根信息滤波(SRIF)方法对北斗卫星精密轨道进行实时逐历元解算. 实验结果表明:相比于超快速定轨模式,基于实时滤波方法的轨道产品能够有效避免边界跳变,具有更好的连续性和稳定性;同时,实时滤波定轨方法能够显著提高BDS的轨道精度,其中中轨道地球卫星(MEO)和倾斜地球同步轨道卫星(IGSO)的三维轨道误差分别减小了46%和68%,卫星激光测距(SLR)检核精度也普遍优于预报轨道.
-
关键词:
- 实时精密定轨 /
- 北斗卫星导航系统(BDS) /
- 平方根信息滤波 /
- 轨道精度 /
- 卫星激光测距(SLR)检核
Abstract: Continuous, stable and high-precision real-time satellite orbit products are essential for the international, scale and intelligent application of the BeiDou system. Current BDS real-time precise orbit products, which rely on “batch processing solution + orbit prediction”, suffer from poor continuity, low stability and low accuracy. Therefore, we introduce the square root information filtering method to perform real-time epoch-by-epoch solutions for the precise orbit of BeiDou satellites. Experimental results demonstrate that the BDS orbits generated by real-time filtering method outperform the ultra-rapid orbit products by effectively avoiding boundary jumps, improving continuity and stability. Moreover, the real-time filtering precise orbit determination method can significantly improve the orbit accuracy of BeiDou satellites, reducing the 3D orbit errors of MEO and IGSO satellites by 46% and 68%, respectively. Also, the validation by satellite laser ranging shows that the orbit accuracy of real-time filtering method is generally better than that of the predicted orbit. -
表 1 实时滤波轨道解算时的处理策略
相关内容 处理策略 观测值 MGEX观测数据;伪距和相位;非差IF组合 观测频率选用 B1I+B3I 观测处理间隔 300 s 截止高度角 7° 观测先验 伪距0.6 m;相位0.02周 对流层干延迟 采用Saastamonien模型和GMF的投影函数 电离层延迟 采用IF组合消除,不考虑高阶延迟 天线相位中心改正 采用igs14.atx天线文件改正 卫星天线相位缠绕 模型改正 地球潮汐影响 对其中固体潮汐,海洋潮汐和极移潮汐进行改正 相对论效应 模型改正 地球重力场 采用了12×12阶次的EGM08模型 N体引力 考虑月亮及太阳系内行星的影响;采用JPL DE405计算星体位置 地球潮汐 采用IERS2010模型和FES2004模型计算 相对论效应 采用IERS2010模型计算 太阳光压模型 采用ECOM2模型 卫星位置/速度参数 采用随机游走模型估计;模型噪声为10−12 卫星太阳光压参数 采用随机游走模型估计;模型噪声为10−12 测站坐标参数 采用IGS的SNX文件进行强约束 测站钟差/卫星钟差参数 采用白噪声模型估计 模糊度固定参数 采用常数模型进行估计 对流层参数 采用分段常数模型估计;时段间隔为2 h 系统间偏差参数 采用分段常数模型估计;时间间隔为24 h 地球自转定向参数 采用分段线性模型估计;时段间隔为24 h 模糊度固定策略 松约束固定所有双差基线 最短卫星共视时长 900 s 宽巷模糊度平滑处理时间间隔 30 s 双差基线长度阈值 3500 km  下载: 导出CSV
下载: 导出CSV
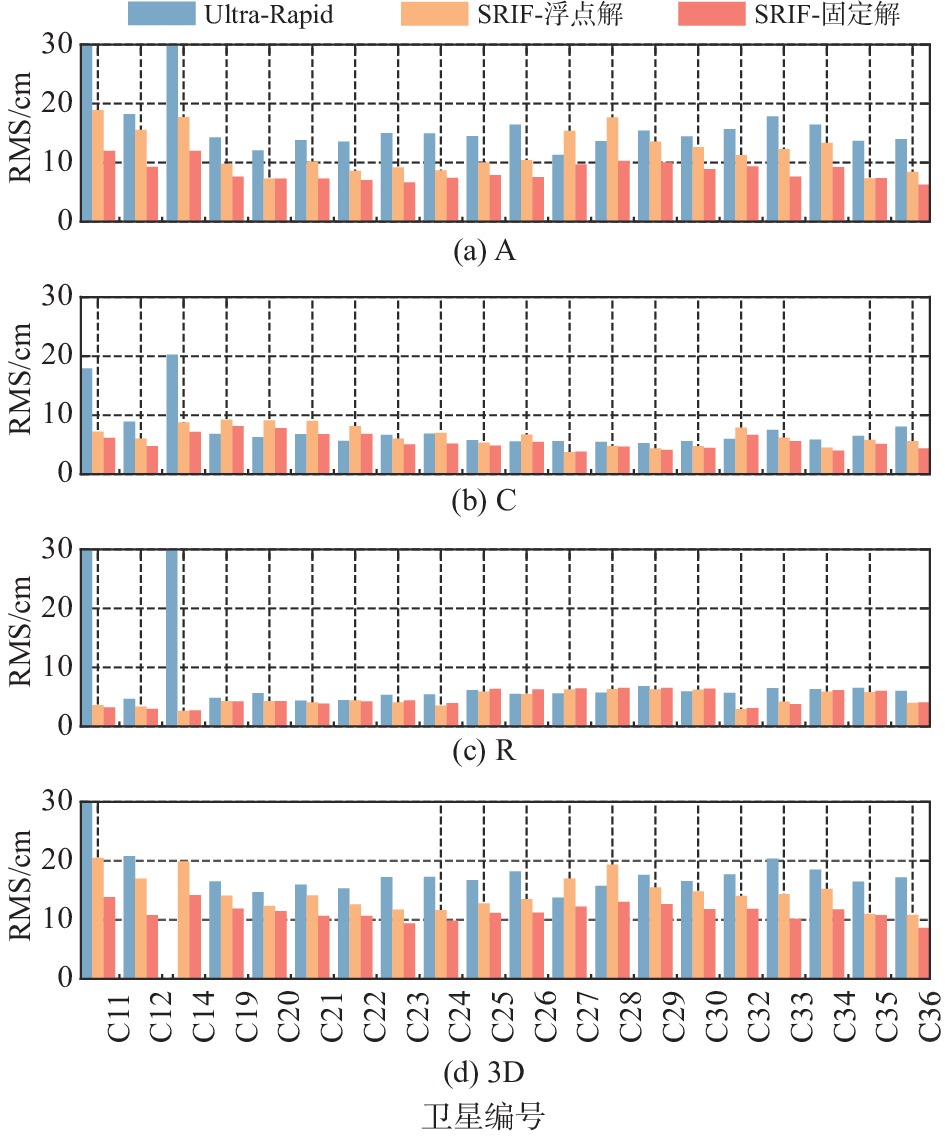
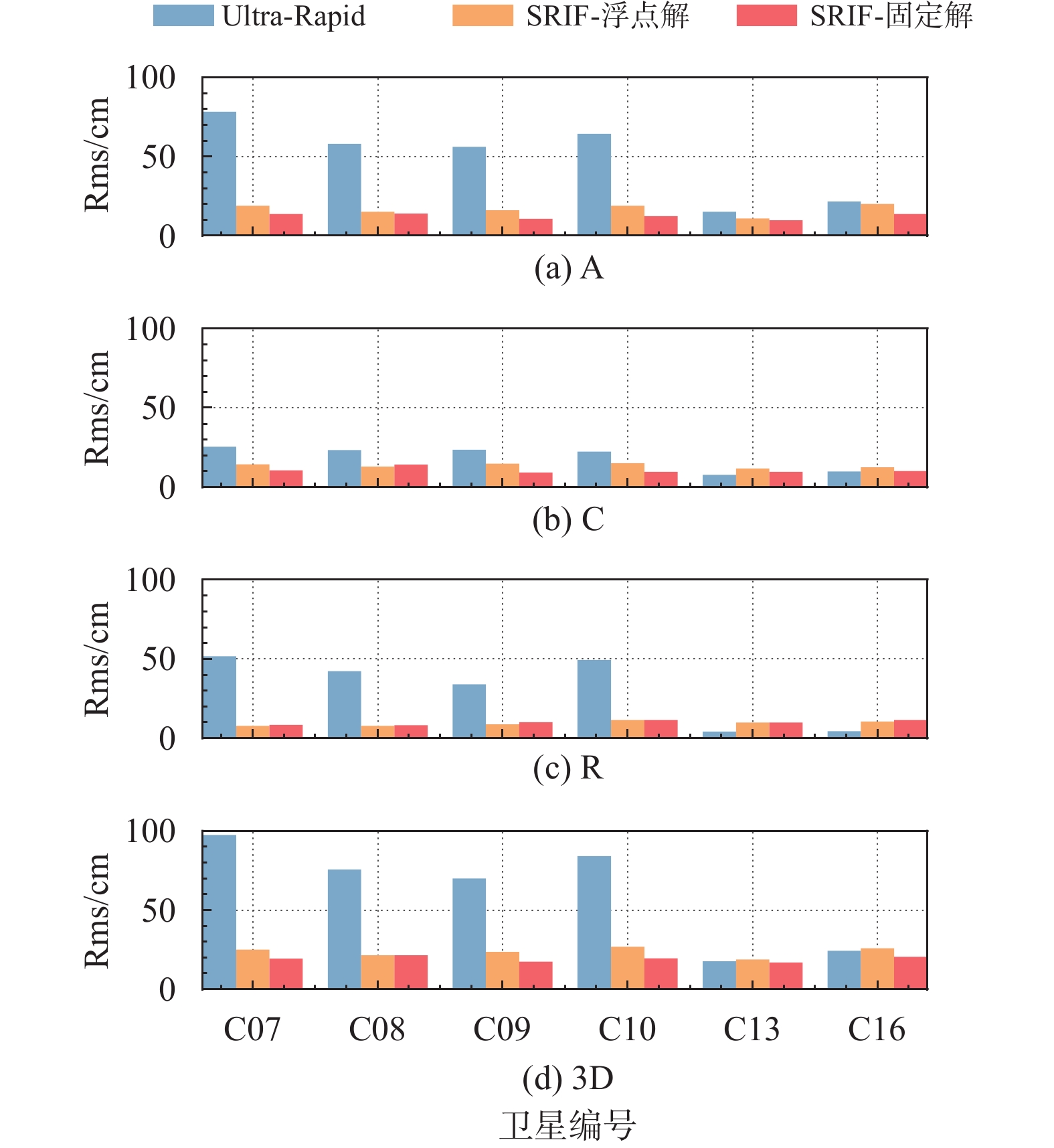
表 3 北斗超快速轨道产品以及实时滤波轨道浮点解和固定解与WUM产品轨道比较RMS均值统计结果
cm 卫星
类型Ultra-rapid SRIF-浮点解 SRIF-固定解 A C R 3D A C R 3D A C R 3D MEO 17.9 7.6 8.3 21.3 11.9 6.5 4.7 14.4 8.5 5.5 4.8 11.4 IGSO 49.0 18.7 31.0 61.4 16.8 13.6 9.3 23.5 12.4 10.5 9.9 19.2
下载: 导出CSV
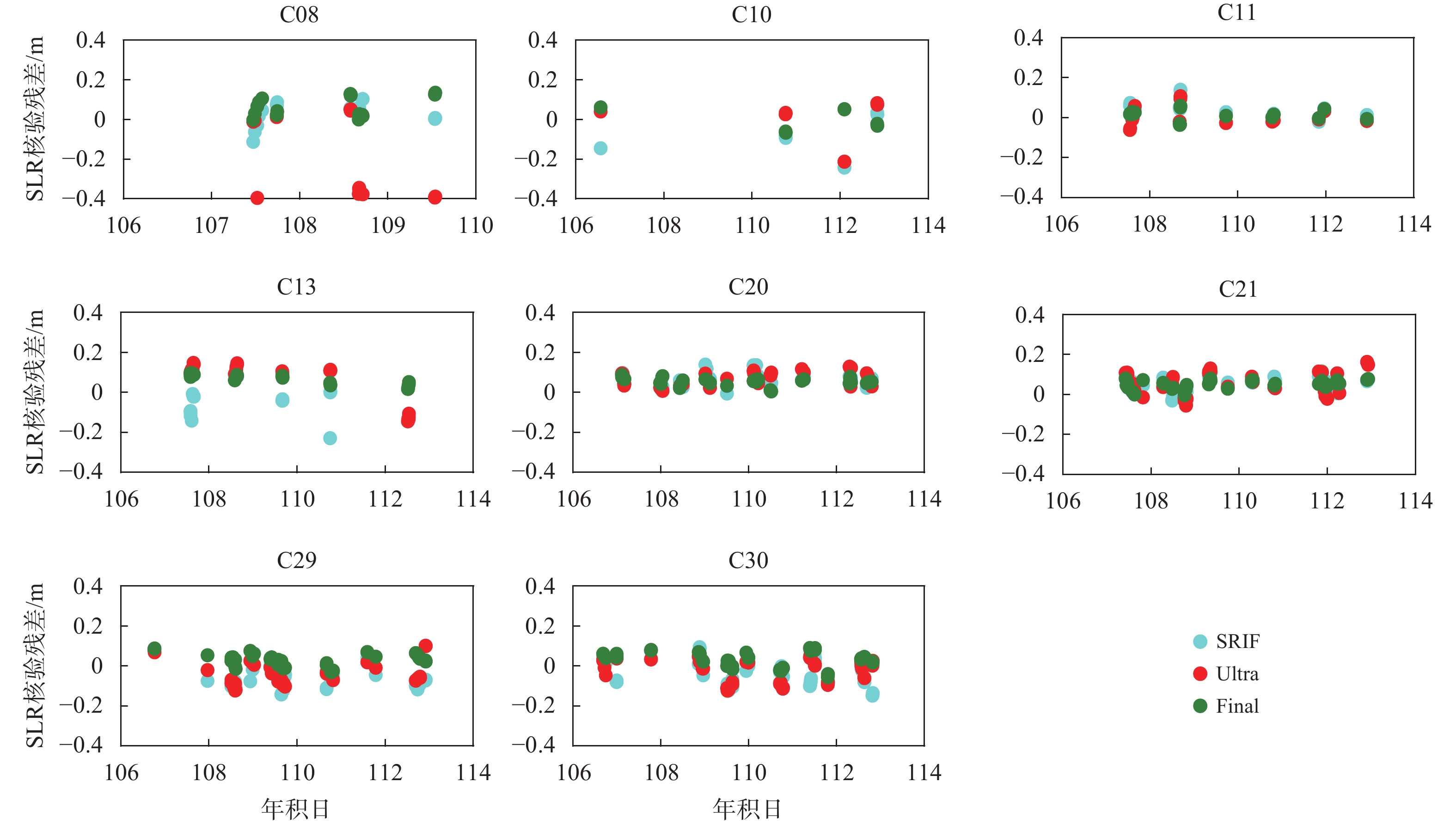
表 4 北斗卫星轨道SLR检核统计结果
cm 卫星编号 轨道类型 实时滤波轨道 超快速轨道 WUM产品 均值 标准差 RMSE 均值 标准差 RMSE 均值 标准差 RMSE C08 IGSO 3.2 5.4 6.3 −21.5 20.6 29.8 6.5 5.0 8.2 C10 IGSO −1.7 11.5 11.6 −10.4 9.8 14.3 −1.0 5.2 5.3 C13 IGSO 6.0 10.1 11.7 −18.3 19.2 26.5 6.6 2.5 7.1 C11 MEO 0.1 4.0 4.0 3.8 3.5 5.2 1.1 2.5 2.7 C20 MEO 6.5 3.4 7.3 6.8 3.0 7.4 5.4 1.8 5.7 C21 MEO 5.4 5.5 7.7 5.6 3.6 6.6 4.8 2.1 5.3 C29 MEO −4.6 5.7 7.3 −5.9 5.3 8.0 2.7 3.0 4.0 C30 MEO −1.8 5.9 6.1 −3.5 6.0 7.0 3.6 3.8 5.2
下载: 导出CSV
-
[1] 陈俊勇. 全球导航卫星系统进展及其对导航定位的改善[J]. 大地测量与地球动力学, 2009, 29(2): 1-3. DOI: 10.3969/j.issn.1671-5942.2009.02.001 [2] 杨元喜. 北斗卫星导航系统的进展, 贡献与挑战[J]. 测绘学报, 2010, 39(1): 1-6. [3] 李冬航. “北斗+”融合创新与“+北斗”时空应用[J]. 卫星应用, 2020(103): 32-36. [4] 徐黎, 袁运斌. 不同分析中心GNSS实时SSR产品研究与分析[J]. 导航定位学报, 2020(6): 71-81. DOI: 10.3969/j.issn.2095-4999.2020.06.011 [5] ZHANG Q, MOORE P, HANLEY J, et al. Auto-BAHN: Software for near real-time GPS orbit and clock computations[J]. Advances in space research, 2007, 39(10): 1531-1538. DOI: 10.1016/j.asr.2007.02.062 [6] LAURICHESSE D, CERRI L, BERTHIAS J-P, et al. Real time precise GPS constellation and clocks estimation by means of a Kalman filter[C]//Proceedings of the 26th International Technical Meeting of the Aatellite Division of the Institute of Navigation (ION GNSS+ 2013), 2013: 1155-1163. [7] DAI X L, LOU Y D, DAI Z Q, et al. Real-time precise orbit determination for BDS satellites using the square root information filter[J]. GPS solutions, 2019, 23(2): 1-14. DOI: 10.1007/s10291-019-0827-1 [8] 匡开发. GNSS卫星实时精密定轨技术研究[D]. 武汉: 武汉大学, 2019. [9] MONTEBRUCK O, HUGENTOBLER U, DACH R, et al. Apparent clock variations of the Block IIF-1 (SVN62) GPS satellite[J]. GPS solutions, 2012, 16(3): 303-313. DOI: 10.1007/s10291-011-0232-x [10] SAASTAMOINEN J. Contribution to the theory of atmospheric refraction[J]. Bull geodesique, 1972, 105(1): 279-298. DOI: 10.1007/BF02522083 [11] 赵齐乐. GPS导航星座及低轨卫星的精密定轨理论和软件研究[D]. 武汉: 武汉大学, 2004. [12] 刘林. 人造地球卫星轨道力学[M]. 北京: 高等教育出版社, 1992. [13] BIERMAN G J. The treatment of bias in the square-root information filter/smoother[J]. Journal of optimization theory and applications, 1975, 16(1): 165-178. DOI: 10.1007/BF00935630 [14] LI X X, HAN X J, LI X, et al. GREAT-UPD: An open-source software for uncalibrated phase delay estimation based on multi-GNSS and multi-frequency observations[J]. GPS solutions, 2021, 25(2): 1-9. DOI: 10.1007/s10291-020-01070-2 [15] BERTIGER W, DESAI S D, HAINES B, et al. Single receiver phase ambiguity resolution with GPS data[J]. Journal of geodesy, 2010, 84(5): 327-337. DOI: 10.1007/s00190-010-0371-9 [16] GE M, GENDT G, DICK G, et al. Improving carrier-phase ambiguity resolution in global GPS network solutions[J]. Journal of geodesy, 2005, 79(1): 103-110. DOI: 10.1007/s00190-005-0447-0 [17] 戴小蕾. 基于平方根信息滤波的GNSS导航卫星实时精密定轨理论与方法[D]. 武汉: 武汉大学, 2016. [18] ZHANG H F, LONG M L, YANG H F, et al. Overview of Satellite Laser Ranging for BeiDou Navigation Satellite System[J]. Aerospace china, 2020, 21(04): 31-41. DOI: 10.3969/j.issn.1671-0940.2020.04.004 -



 点击查看大图
点击查看大图
图(7) / 表(4)
计量
- 文章访问数: 254
- HTML全文浏览量: 256
- PDF下载量: 49
- 被引次数: 0
