

GNSS/INS loose combined navigation based on factor graph optimization PPP
-
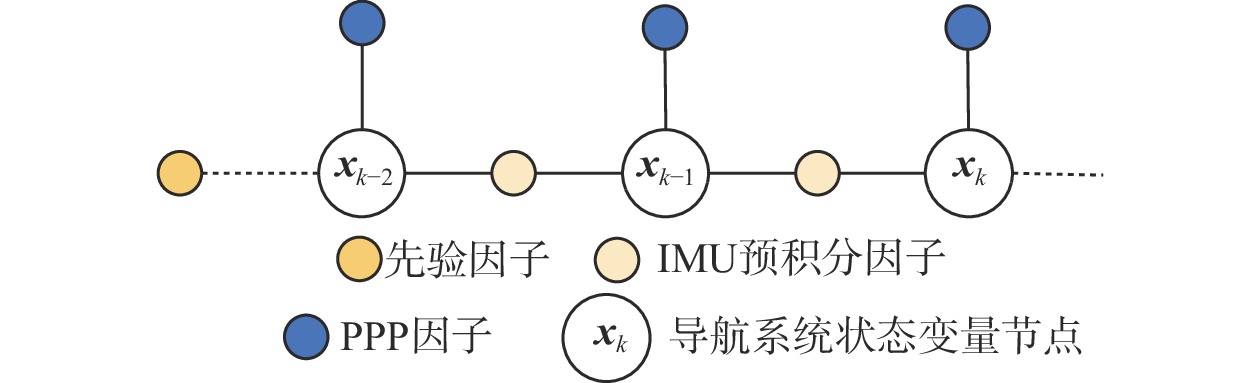
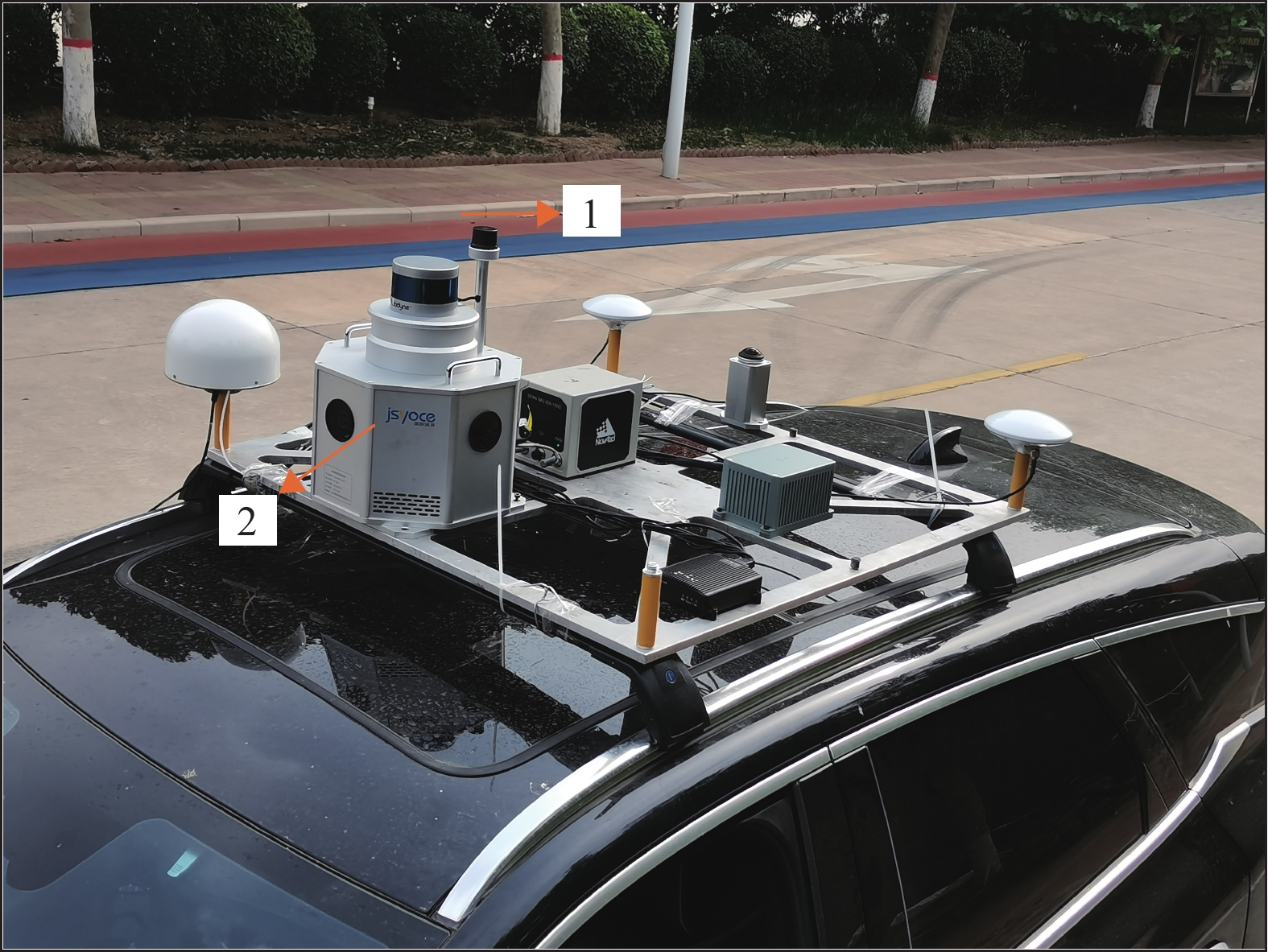
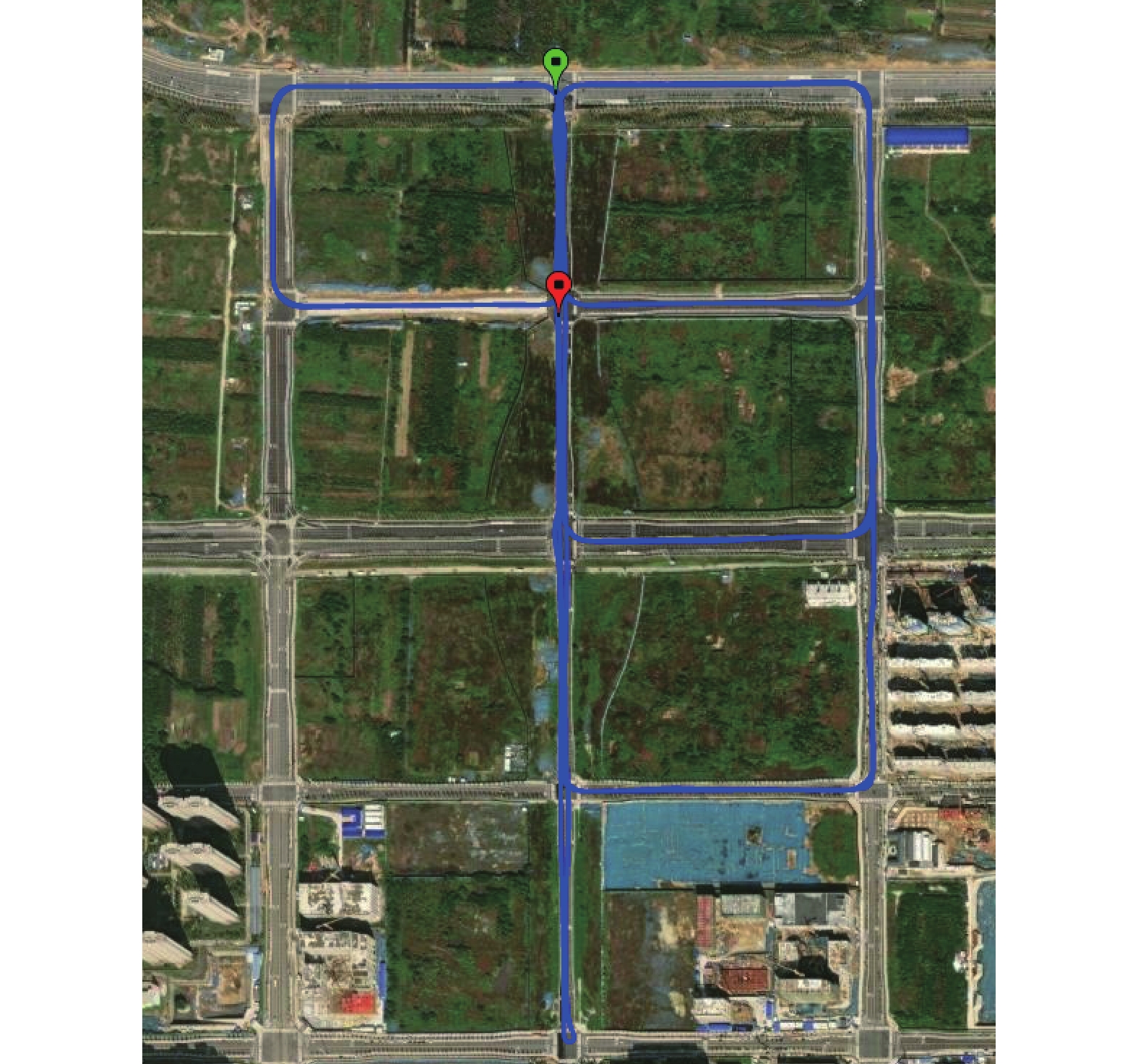
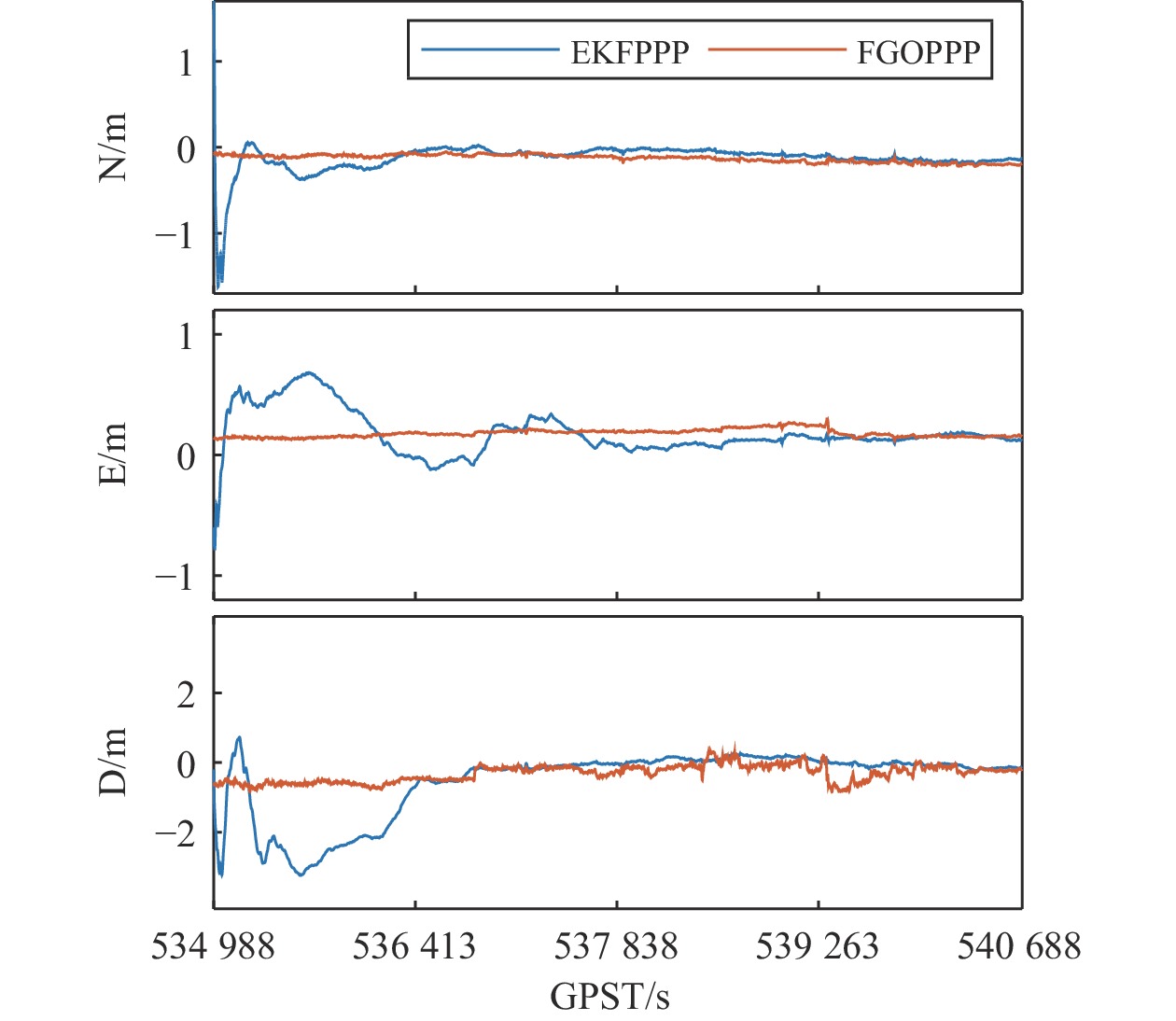
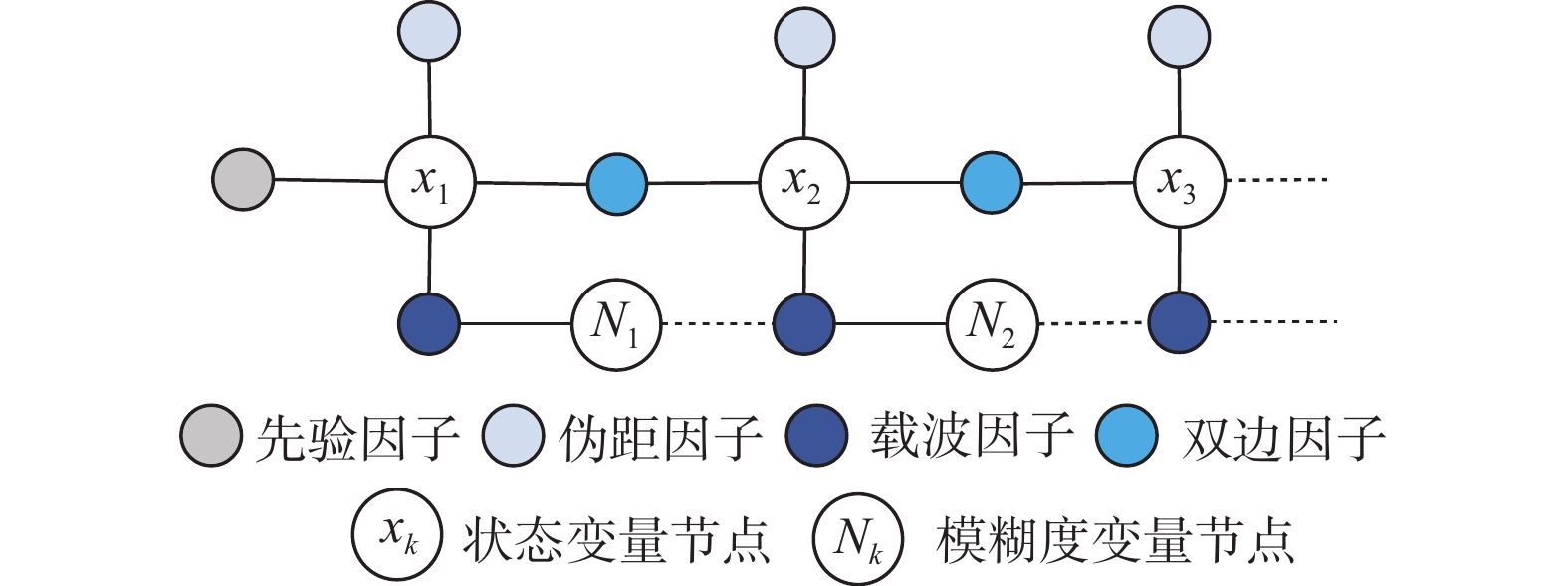
摘要: 针对全球卫星导航系统(GNSS)容易因建筑物遮挡、多路径效应以及卫星可见数不足导致的GNSS信号失锁问题,提出了一种基于因子图优化(FGO)的精密单点定位(PPP)算法进行GNSS和惯性导航系统(INS)的融合定位方法.首先参照经典PPP双频无电离层模型,构建伪距、载波因子,根据非线性优化理论求解非线性最小二乘问题;再将优化后的PPP位置信息作为PPP因子,与地球自转的精化预积分因子一同构建到GNSS/INS松组合FGO框架中,实现组合导航信息非线性优化. 车载实测结果表明:针对PPP,所提算法的定位精度相比扩展卡尔曼滤波(EKF)算法在北(N)方向、东(E)方向、地(D)方向上分别提升37.09%、28.79%、64.59%;针对GNSS/INS组合导航,该算法的定位精度相比EKF算法在三个方向上分别提升了49.08%、41.22%、71.86%.
-
关键词:
- 因子图优化(FGO) /
- 扩展卡尔曼滤波(EKF) /
- 精化预积分 /
- 精密单点定位(PPP) /
- 组合导航
Abstract: Aiming at the problem of global navigation satellite system signal loss caused by building occlusion, multipath effect and insufficient satellite visibility, a precise point positioning (PPP) algorithm based on factor graph optimization is proposed for the integrated positioning of GNSS and INS. First, with reference to the classical PPP dual-frequency lonosphere-free model, the pseudo-range and carrier factors are constructed, and the nonlinear least-squares problem is solved according to the nonlinear optimization theory. Then, the optimized PPP location information is used as the GNSS PPP factor, and the refined pre-integration factor considering the rotation of the earth is constructed into the GNSS/INS loose combination factor graph frame, to realize the nonlinear optimization of integrated navigation information. The results of on-board real measurement show that the positioning accuracy of the proposed algorithm is 37.09%, 28.79% and 64.59% higher than that of the extended Kalman filter algorithm in the north, east, and down directions respectively for PPP; For GNSS/INS integrated navigation, the positioning accuracy of the algorithm is 49.08%, 41.22% and 71.86% higher than that of the extended Kalman filter algorithm in three directions. -
表 1 惯性导航元件标定参数及空间杠杆杆臂
设备名 陀螺仪 加速度计 北东地坐标系中空间杠杆杆臂/m 零偏
稳定性
/(deg·h−1)角度随机
游走
/deg·
sqrt(h)−1零偏
稳定性
/(mGal)速度随机
游走
/m·s−1,
sqrt(h)−1HGuidei300 3 0.15 0.02 0.02 0,0.114,
−0.120 下载: 导出CSV
下载: 导出CSV
表 2 基于EKF和FGO的PPP的三维位置RMSE
m IMU EKF PPP FGO PPP N E D N E D HGuidei300 0.213 0.257 1.124 0.134 0.183 0.398
下载: 导出CSV
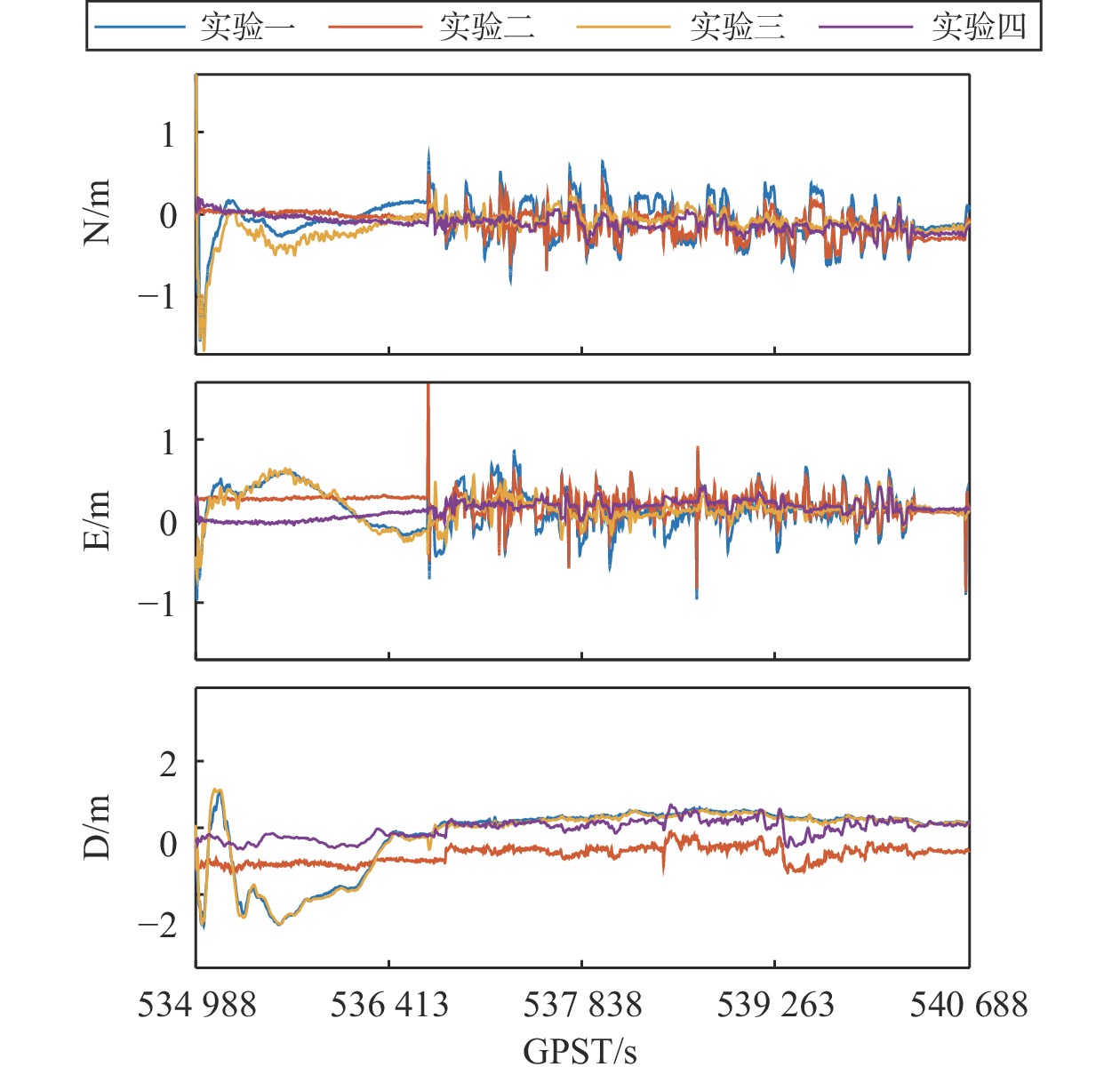
表 3 GNSS/INS三维位置RMSE
m 模型类别 N E D 实验一(EKF PPP-EKF) 0.273 0.296 1.002 实验二(FGO PPP-EKF) 0.185 0.259 0.844 实验三(EKF PPP-FGO) 0.233 0.243 1.015 实验四(FGO PPP-FGO) 0.139 0.174 0.282
下载: 导出CSV
-
[1] 金东阳, 刘党辉, 夏长峰. GNSS/INS深组合导航技术研究进展[J]. 全球定位系统, 2014, 39(3): 24-28, 32. [2] 高周正. 多模GNSS PPP/INS组合系统算法与应用研究[D]. 武汉: 武汉大学, 2016. [3] 王富, 韩保民, 胡亮亮, 等. 城市复杂环境下GNSS/INS组合导航算法研究[J]. 大地测量与地球动力学, 2022, 42(1): 15-20. [4] 蒋晨. GNSS/INS组合导航滤波算法及可靠性分析[J]. 测绘学报, 2020, 49(10): 1376. [5] 周雅婧, 曾庆化, 刘建业,等. 因子图发展及其在定位与导航的应用技术[J]. 全球定位系统, 2020, 45(1): 1-11. [6] 韩勇强, 于潇颖, 纪泽源, 等. 面向城市复杂环境的GNSS/INS高精度图优化算法[J]. 中国惯性技术学报, 2022, 30(5): 582-588. [7] 闵涛, 罗小勇, 高峰, 等. 基于位姿图优化的MEMS-INS/GNSS行人融合定位方法[J]. 中国惯性技术学报, 2021, 29(1): 40-47. [8] 王运明, 程相, 李卫东, 等. 基于因子图的BDS/IMU列车定位信息融合模型[J]. 铁道科学与工程学报, 2023(3): 1077-1084. [9] WEN W S, PFEIFER T, BAI X W, et al. It is time for factor graph optimization for GNSS/INS integration: comparison between FGO and EKF[C]// International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2019), 2019. [10] TANG H L, NIU X J, ZHANG T S, et al. Exploring the accuracy potential of IMU preintegration in factor graph pptimization[J]. arXiv, 2021. DOI: 10.48550/arXiv.210903010 [11] TA D-N, KOBILAROV M, DELLAERT F. A factor graph approach to estimation and model predictive control on unmanned aerial vehicles[C]//International Conference on Unmanned Aircraft Systems (ICUAS), 2014. [12] LOELIGER H-A, DAUWELS J, HU J, et al. The factor graph approach to model-based signal processing[J]. Proceedings of the IEEE, 2007, 95(6): 1295-1322. DOI: 10.1109/JPROC.2007.896497 [13] 杨元喜, 郭海荣, 何海波. 卫星导航定位原理[M]. 北京: 国防工业出版社, 2021. [14] KOUBA J, HEROUX P. Precise point positioning using IGS orbit and clock products[J]. GPS solutions, 2001, 5(2): 12-28. DOI: 10.1007/PL00012883 [15] 贾晓雪, 赵冬青, 肖国锐, 等. 基于精化预积分的GNSS/IMU/视觉多源融合定位方法[J/OL]. (2022-09-25)[2023-03-15]. 北京航空航天大学学报: 1-10. https://www.cnki.com.cn/Article/CJFDTotal-BJHK20220925002.htm [16] KAESS M, JOHANNSSON H, ROBERTS R, et al. iSAM2: Incremental smoothing and mapping with fluid relinearization and incremental variable reordering[C]// IEEE International Conference on Robotics and Automation, 2011. [17] 潘军道, 韦照川, 杨柯. 基于RTKLIB的精密单点定位及结果分析[J]. 全球定位系统, 2017, 42(1): 95-99. [18] DELLAERT F, KAESS M. Factor graphs for robot perception[J]. Foundations & trends in robotics, 2017: 154. DOI: 10.1561/2300000043 [19] 王炳清. 基于高精度惯性器件的因子图组合导航方法研究[D]. 南京: 南京航空航天大学, 2021. [20] 白师宇, 赖际舟, 吕品等. 基于IMU/ODO预积分的多传感器即插即用因子图融合方法[J]. 中国惯性技术学报, 2020, 28(5): 624-628,637. [21] 王晨曦. 基于IMU与单目视觉融合的位姿估计方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2019. [22] 严恭敏, 翁浚. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019. -

 点击查看大图
点击查看大图
图(6) / 表(3)
计量
- 文章访问数: 818
- HTML全文浏览量: 323
- PDF下载量: 118
- 被引次数: 0
