

Navigation accuracy and applicability analysis of GNSS technology in GEO and IGSO spacecraft
-
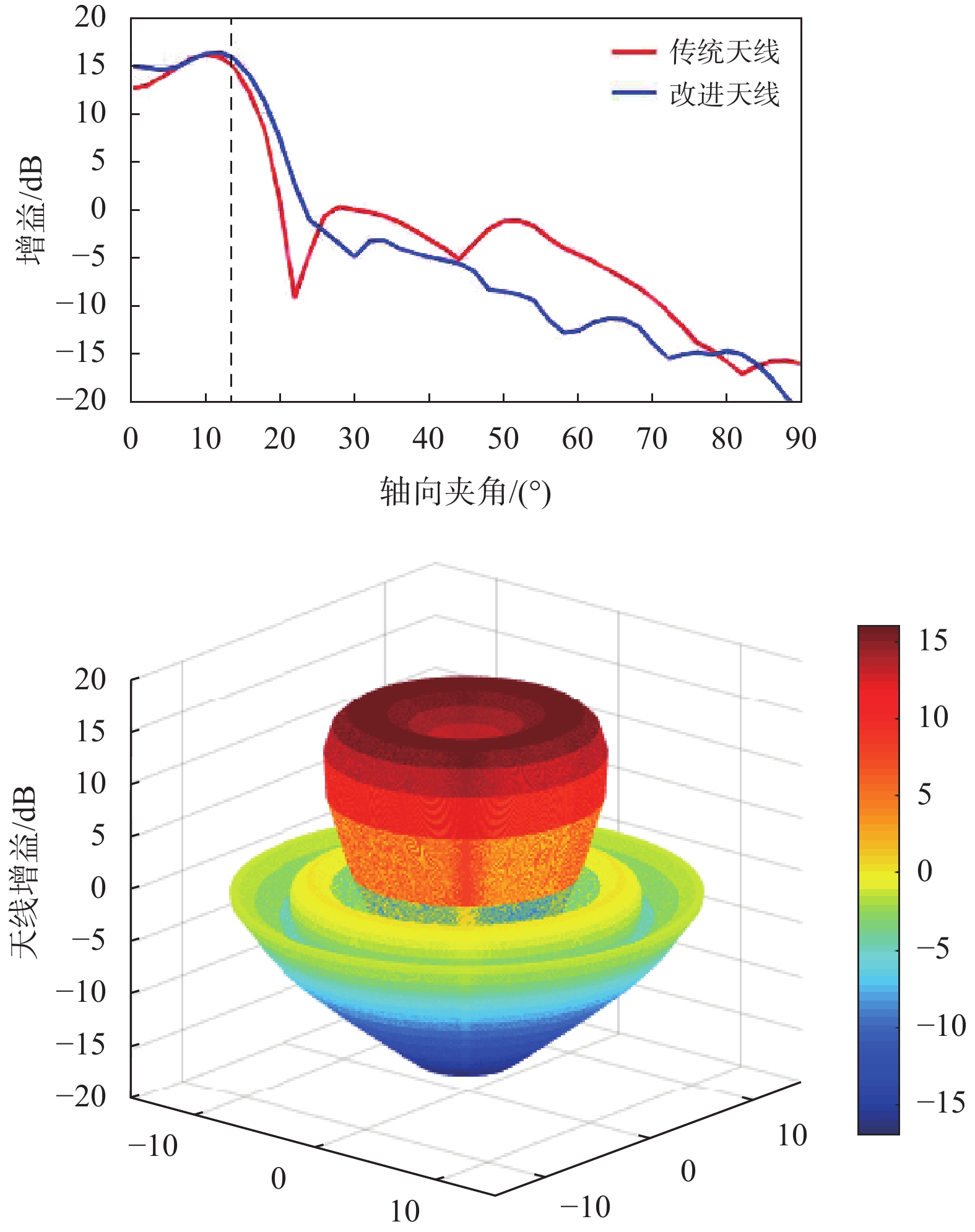
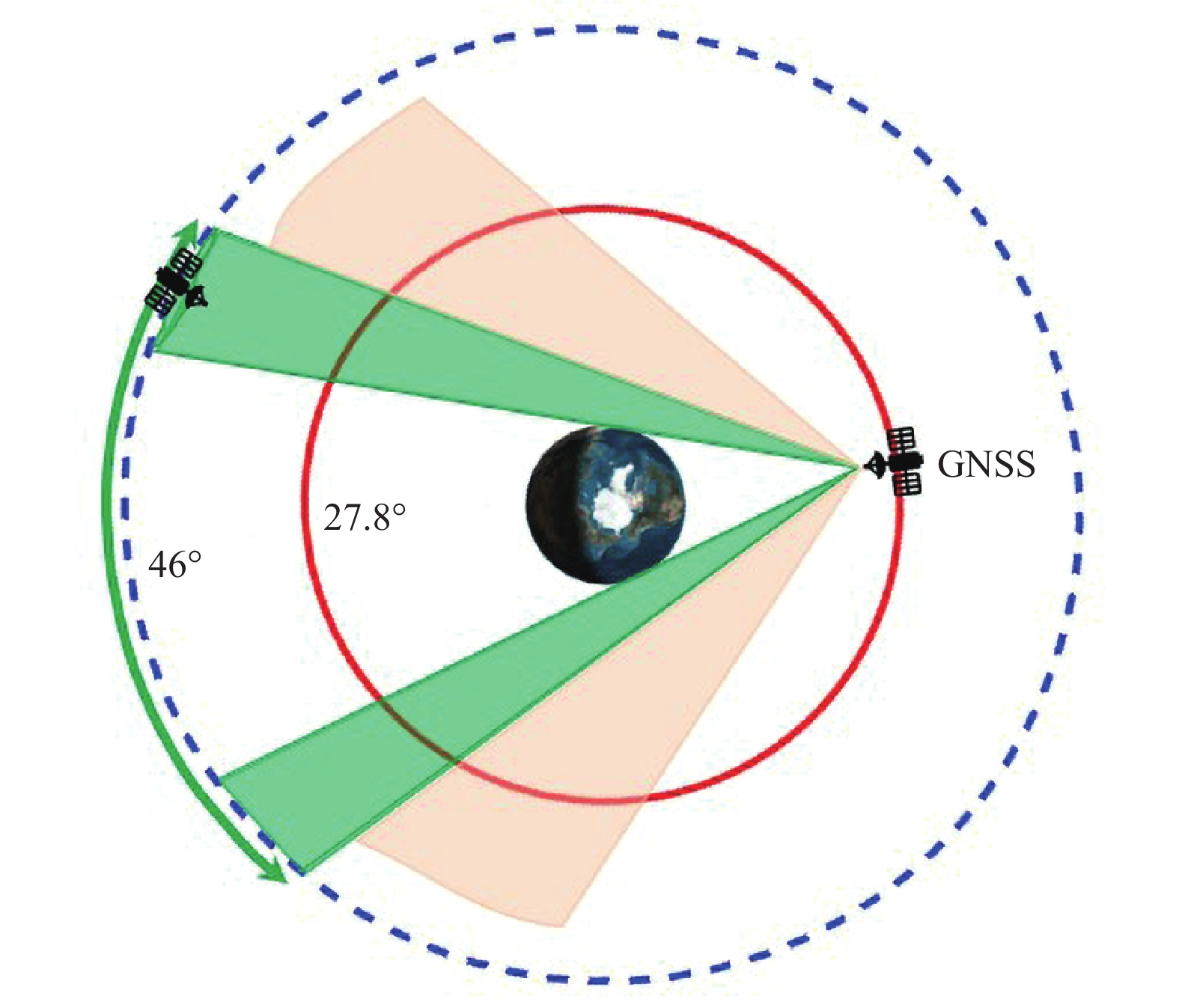
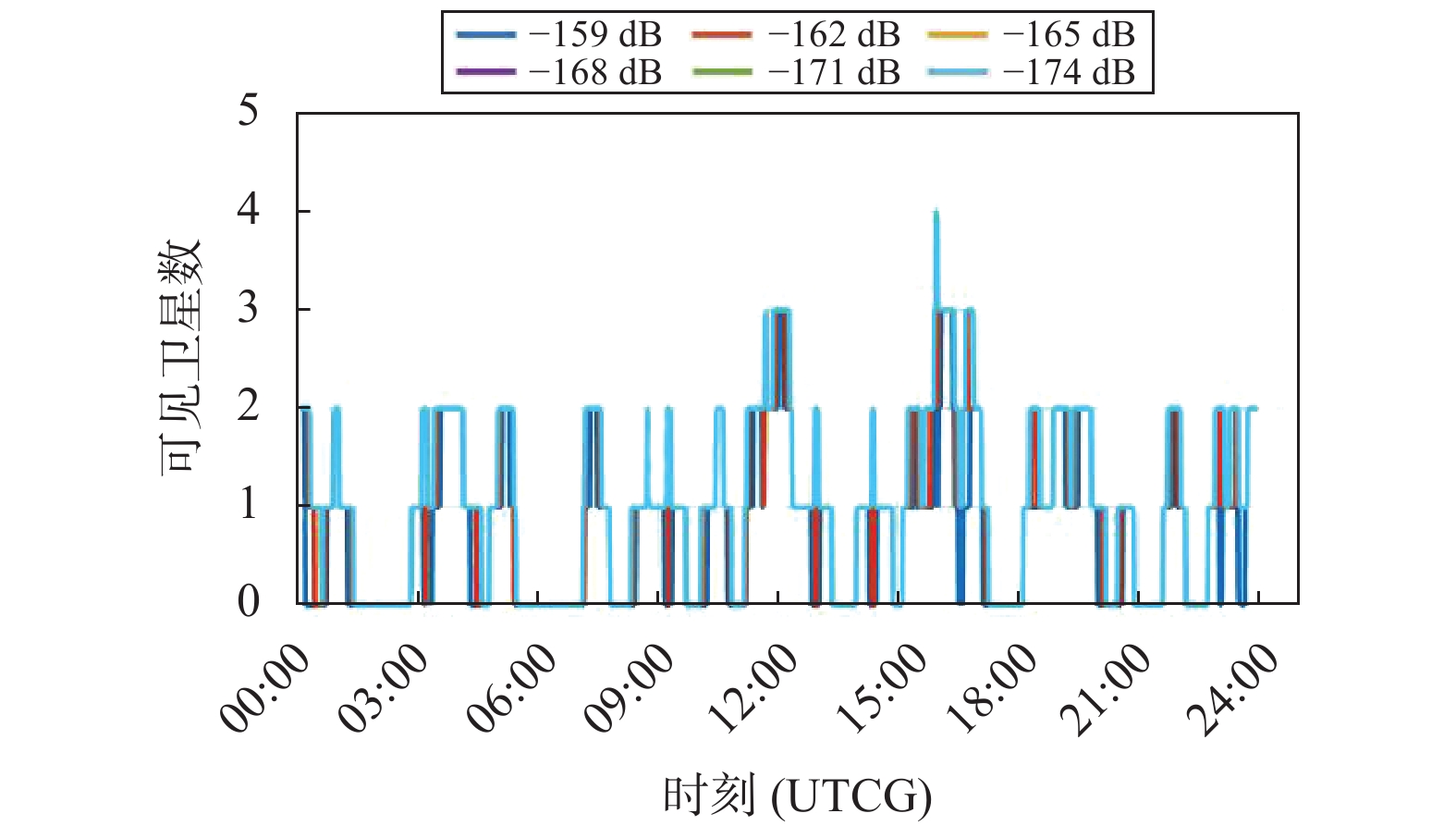
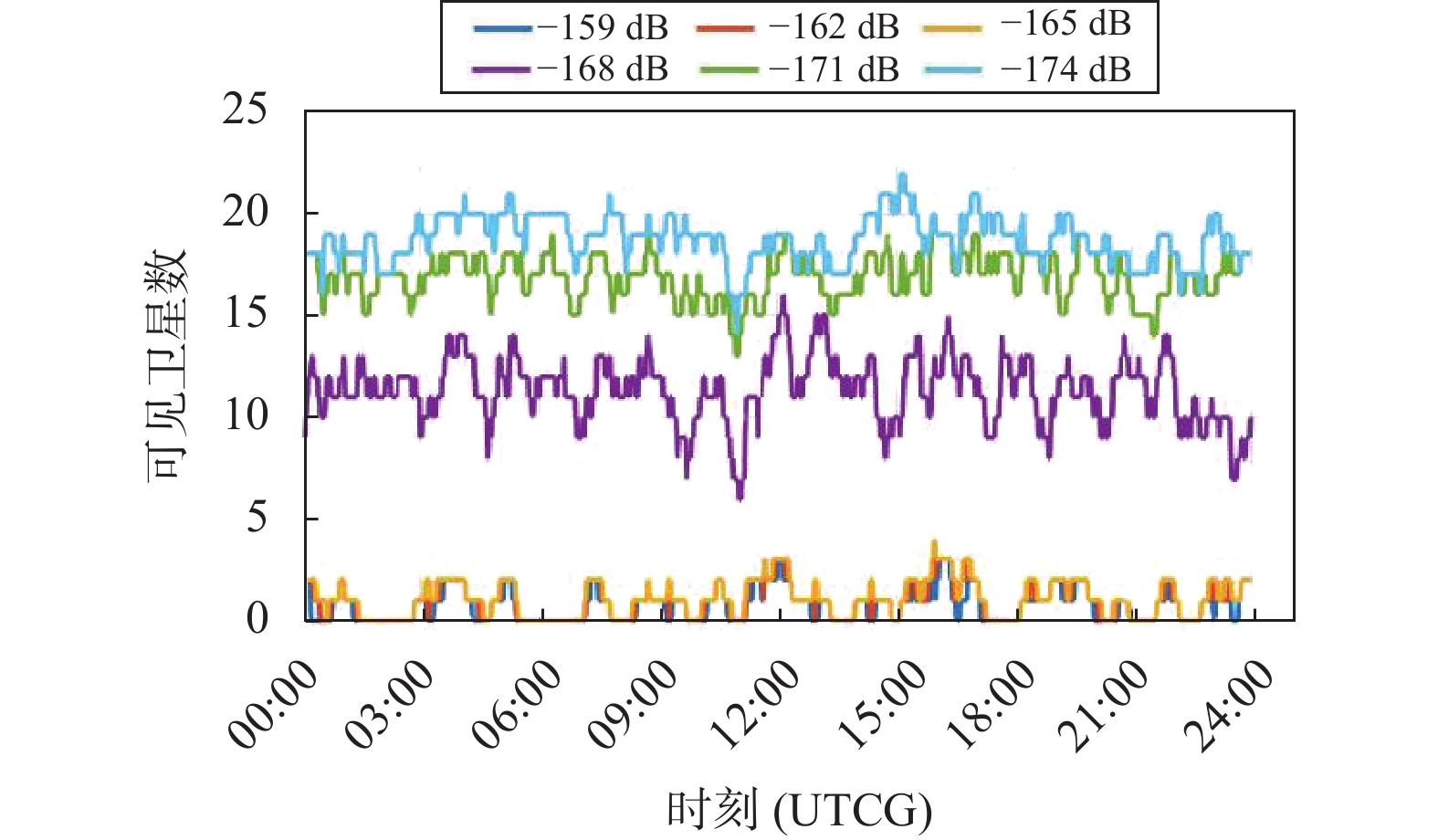
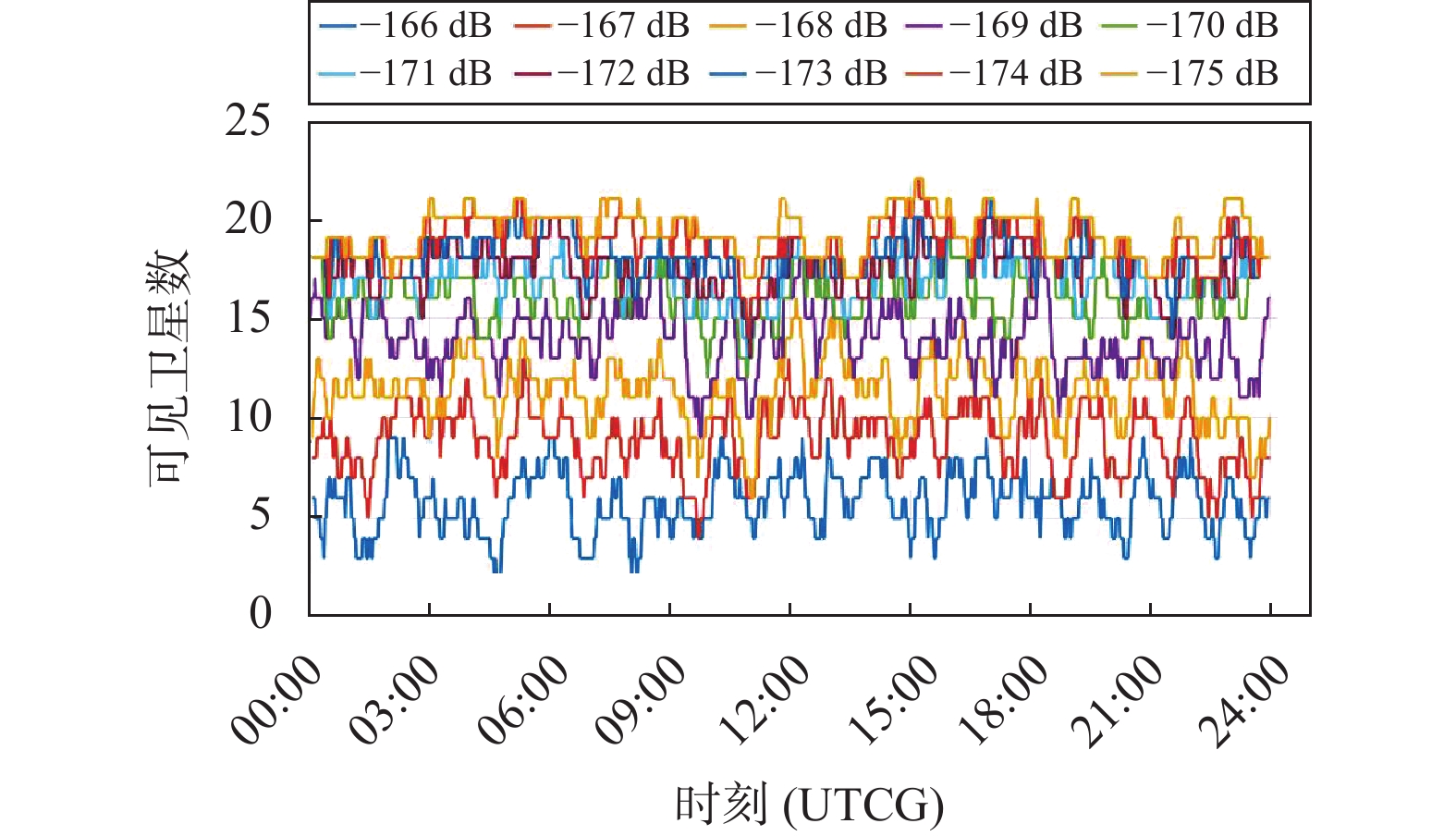
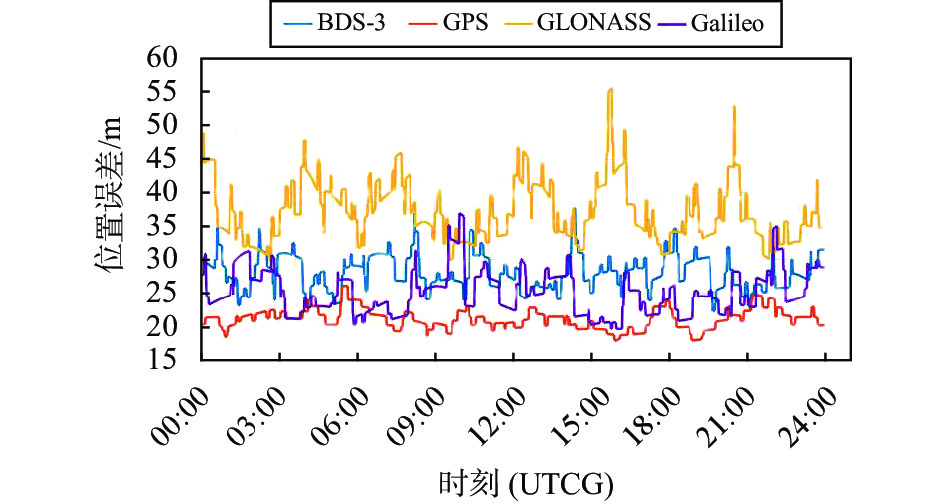
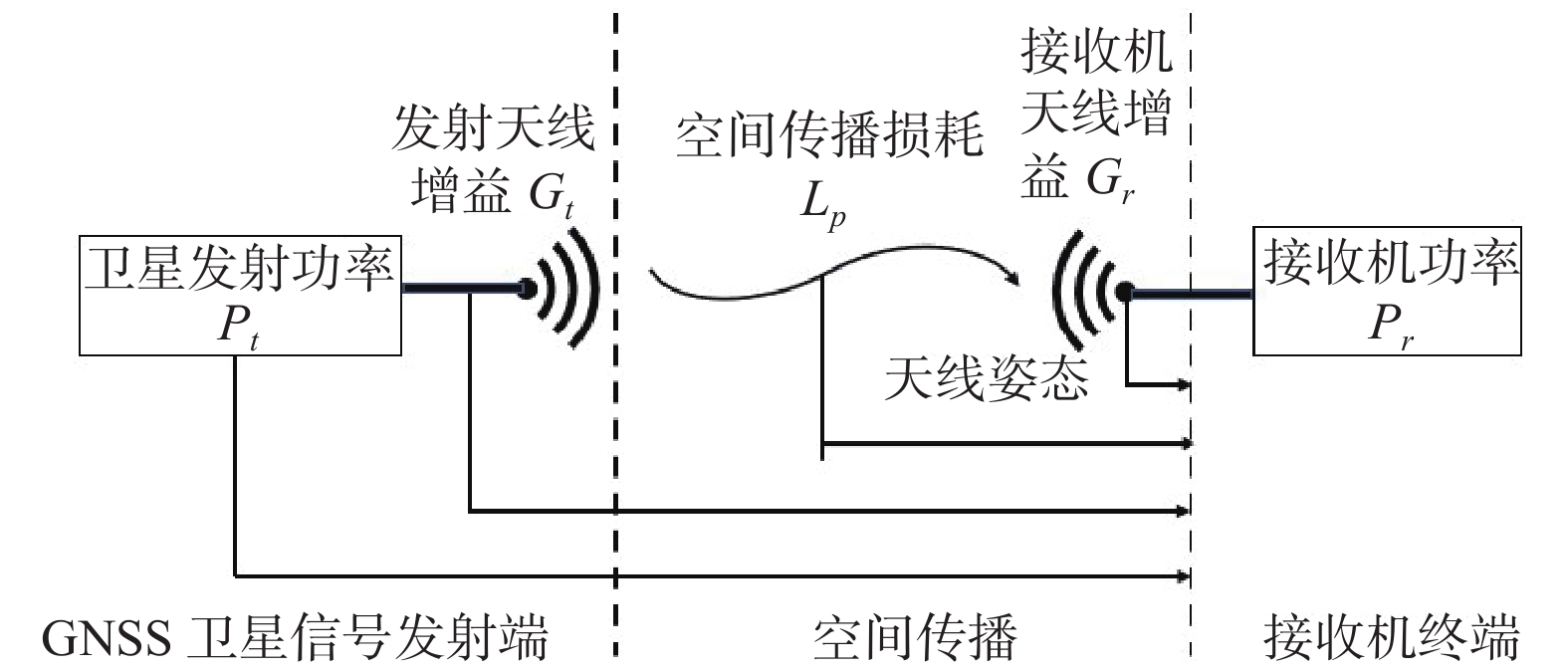
摘要: 现阶段高轨道航天器导航主要依靠地基测控系统,为了研究全球卫星导航系统(GNSS)技术用于高轨道航天器导航的可行性,对GNSS技术在地球静止轨道(GEO)卫星、倾斜地球同步轨道(IGSO)卫星航天器中的导航精度及适用性展开了分析研究. 采用2021年11月9日的两行轨道数据(TLE)仿真GNSS星座,以不同星下点的GEO卫星和不同倾角的IGSO卫星作为目标星展开导航仿真试验. 实验结果表明:为了满足GNSS解算所需的卫星数量,须通过接收旁瓣信号来增加可见卫星数目. 对GEO目标星而言,当接收机灵敏度高于−169 dB时,导航精度可达30 m;利用GPS对7个不同的GEO或IGSO轨道目标星进行导航实验表明,GPS对目标星导航的位置误差约为35 m;北斗三号(BDS-3)、GPS、GLONASS、Galileo的导航位置误差均值分别为28.03 m、21.16 m、37.15 m、25.09 m,具有良好的内符合精度,其中GPS精度最高,GLONASS精度最低,但大部分时段也在45 m内.
-
关键词:
- 全球卫星导航系统(GNSS) /
- 高轨道航天器 /
- 卫星可见性 /
- 几何精度衰减因子(GDOP) /
- 位置误差
Abstract: At present, the navigation of high-orbit spacecraft mainly relies on ground-based measurement and control systems. In order to study the feasibility of Global Navigation Satellite System (GNSS) technology in high-orbit spacecraft navigation, the navigation accuracy and adaptability of GNSS technology in geostationary earth orbit (GEO) and inclined geosynchronous orbit (IGSO) high-orbit spacecraft were analyzed and studied. The GNSS navigation satellite constellation was simulated using two-line orbital element (TLE) on November 9, 2021. GEO satellites at different sub-satellite points and IGSO satellites at different inclination angles were used as target satellites to carry out navigation experiments. The experimental results show that: In order to meet the number of satellites required for GNSS calculation, the number of visible satellites must be increased by receiving sidelobe signals; for GEO target satellites, when the receiver sensitivity is higher than −169 dB, the navigation accuracy can reach 30 m; the GPS system is used to conduct navigation and orbit determination experiments on 7 different GEO or IGSO orbits; the average accuracy of BeiDou-3 Navigation Satellite System (BDS-3), GPS, GLONASS, and Galileo in high-orbit spacecraft navigation is 28.03 m, 21.16 m, 37.15 m, and 25.09 m, respectively. GPS has the highest accuracy and GLONASS has the lowest accuracy, but it is also 45 m in most periods within. -
表 2 不同目标星轨道参数
卫星编号 星下点 轨道倾角 GEO-1 100°W 0° GEO-2 10°W 0° GEO-3 170°E 0° GEO-4 80°E 0° IGSO-5 100°W 30° IGSO-6 100°W 60° IGSO-7 100°W 90°  下载: 导出CSV
下载: 导出CSV
表 3 四大卫星导航系统仿真参数
导航系统 载波频率 卫星
个数轨道
个数轨道
倾角/(°)轨道高度/
kmBDS 1 561.098 MHz 24+2 3 55.0 21 528 GPS 1 575.42 MHz 30 6 55.0 20 200 GLONASS 1 602+5 625*k MHz 27 3 64.8 19 100 Galileo 1 575.423 MHz 26 3 56.0 23 223
下载: 导出CSV
表 4 不同接收机频率对应卫星可见性百分比
灵敏度/dB ≥4 ≥5 ≥6 ≥7 ≥8 ≥9 ≥10 ≥11 ≥12 ≥13 ≥14 ≥15 ≥16 −165 0.21 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.00 0.000 0.000 0.00 0.00 −166 93.95 80.48 57.43 32.15 12.63 2.43 0.00 0.00 0.00 0.000 0.000 0.00 0.00 −167 100.00 99.79 98.81 92.29 79.86 61.25 38.95 14.44 2.15 0.277 0.000 0.00 0.00 −168 100.00 100.00 100.00 99.65 98.10 95.90 86.94 73.40 47.91 21.310 7.430 1.94 0.06 −169 100.00 100.00 100.00 100.00 100.00 100.00 99.79 98.75 94.23 83.260 61.870 35.69 14.02 −170 100.00 100.00 100.00 100.00 100.00 100.00 100.00 100.00 100.00 99.790 98.120 92.15 68.33 −171 100.00 100.00 100.00 100.00 100.00 100.00 100.00 100.00 100.00 100.000 99.580 98.26 87.71 −172 100.00 100.00 100.00 100.00 100.00 100.00 100.00 100.00 100.00 100.000 99.860 99.02 95.48 −173 100.00 100.00 100.00 100.00 100.00 100.00 100.00 100.00 100.00 100.000 100.000 99.72 98.95 −174 100.00 100.00 100.00 100.00 100.00 100.00 100.00 100.00 100.00 100.000 100.000 99.93 99.51 −175 100.00 100.00 100.00 100.00 100.00 100.00 100.00 100.00 100.00 100.000 100.000 100.00 100.00
下载: 导出CSV
表 5 不同接收机频率对应GDOP值、GACC误差均值及其STD值
灵敏度/dB GDOP GACC/m 误差STD/m −167 15.92 77.62 71.11 −168 10.57 52.87 15.37 −169 8.55 42.78 5.94 −170 7.59 37.99 5.06 −171 6.97 34.86 4.63 −172 6.58 32.91 4.24 −173 6.21 31.08 3.18 −174 5.89 29.46 3.13 −175 5.61 28.05 2.83
下载: 导出CSV
表 6 不同GEO/IGSO目标星可见性、GACC误差均值及其STD值
目标星 可见卫星数 GACC/m STD/m GEO-1 16.85 34.87 4.63 GEO-2 16.94 34.61 4.34 GEO-3 16.94 34.61 4.35 GEO-4 16.85 34.87 4.63 IGSO-5 17.47 32.79 3.36 IGSO-6 17.07 33.84 4.37 IGSO-7 17.28 33.58 4.41
下载: 导出CSV
表 7 四大导航卫星系统卫星可见性与GDOP值
导航系统 可见卫星数 GDOP BDS-3 16.57 5.61 GPS 23.69 4.23 GLONASS 16.52 7.43 Galileo 16.88 5.02
下载: 导出CSV
表 8 四大卫星导航系统GACC误差均值及STD值
m 导航系统 均值 STD BDS-3 28.03 2.55 GPS 21.16 1.51 GLONASS 37.15 4.52 Galileo 25.09 3.30
下载: 导出CSV
-
[1] 杜兰. GEO卫星精密定轨技术研究[D]. 郑州: 解放军信息工程大学, 2006. [2] 王猛, 单涛, 王盾. 高轨航天器GNSS技术发展[J]. 测绘学报, 2020, 49(9): 1158-1167. DOI: 10.11947/j.AGCS.2020.20200170 [3] NING X L, WANG F, FANG J C. Implicit UKF and its observability analysis of satellite stellar refraction navigation system[J]. Aerospace science and technology, 2016(54): 49-58. DOI: 10.1016/j.ast.2016.04.010 [4] LAIR J L, DUCHON P, RIANT P, et al. Satellite navigation by stellar refraction[J]. Acta astronautica, 1988, 17(10): 1069-1079. DOI: 10.1016/0094-5765(88)90190-7 [5] KAI X, HONG Z. Performance evaluation of star sensor low frequency error calibration[J]. Acta astronautica, 2014, 98(1): 24-36. DOI: 10.1016/j.actaastro.2013.11.022 [6] MILLS H R. Positional astronomy and astro-navigation made easy[M]. Stanley Thornes, 1978. [7] LIU J, MA J, TIAN J W, et al. X-ray pulsar navigation method for spacecraft with pulsar direction error[J]. Advances in space research, 2010, 46(11): 1409-1417. DOI: 10.1016/j.asr.2010.08.019 [8] PSIAKI M L, MOHIUDDIN S. Modeling, analysis, and simulation of GPS carrier phase for spacecraft relative navigation[J]. Journal of guidance control and dynamics, 2007, 30(6): 1628-1639. DOI: 10.2514/1.29534 [9] HAINES B, LICHTEN S, SRINIVASAN J, et al. A demonstration of unified TDRS/GPS tracking and orbit determination[C]// Goddard Space Flight Center, Flight Mechanics, 1995. [10] YUNCK T P, MELBOURNE W G, THOENTON C L. GPS-based satellite tracking system for precise positioning[J]. IEEE transactions on geoscience and remote sensing, 1985, 4(GE-23): 450-457. DOI: 10.1109/TGRS.1985.289434 [11] BAUER F H, MOREAU M C, DAHLE-MELSAETHER M , et al. The GPS space service volume[J/OL]. [2022-06-20]. Proceedings of international technical meeting of the satellite division of the institute of navigation, 2006. https://ntrs.nasa.gov/api/citations/20060026278/downloads/20060026278.pdf [12] JOEL J K, JENNIFER E V, FRANK H B, et al. Use and protection of GPS sidelobe signals for enhanced navigation performance in high earth orbit[R/OL]. [2022-06-20]. Guidance, navigation and control, 2016. https://ntrs.nasa.gov/api/citations/20160001694/downloads/20160001694.pdf [13] 巩玉振. 基于GNSS的高轨卫星定位技术研究[D]. 北京: 北京理工大学, 2015. [14] CAPUANO V, BLUNT P, BOTTERON C, et al. Standalone GPS L1 C/A receiver for lunar missions[J]. Sensors, 2016, 16(3): 347. DOI: 10.3390/s16030347 [15] LARSON K, GAYLOR D, WINKLER S. Worst-case GPS constellation for testing navigation at geosynchronous orbit for GOES-R[J]. Advances in the astronautical sciences, 2013(149): 403-416. [16] 李冰, 刘蕾, 王猛. GEO卫星GNSS导航在轨长期性能验证与分析[J]. 上海航天, 2017, 34(4): 133-143. [17] 曹建峰, 张宇, 胡松杰, 等. CE5T星载GPS数据的定轨分析[J]. 系统工程与电子技术, 2016, 38(5): 1121-1125. DOI: 10.3969/j.issn.1001-506X.2016.05.23 [18] 陈雷. 高轨飞行器GNSS定位技术研究[D]. 长沙: 国防科技术大学, 2016. [19] JAMES J, SPILKER J , AXELARD P, et al. Global positioning system: theory and applications volume I [M]. Washington American Institute of Aeronautics and Astronautics, 1996: 234-242. [20] GPS ICD 200 (2006) IS-GPS-200 Revision D, IRN-200D-001: NAVSTAR global positioning system Interface Specification, NAVSTAR GPS Space Segment/Navigation User Interface. USA[R/OL]. [2022-06-20]. http://www.gps.gov/technical/icwg/IS-GPS-200D.pdf [21] 石磊玉, 欧钢, 顾青涛, 等. 基于星上天线仰角约束的星间可视卫星集解析算法[J]. 国防科技大学学报, 2011, 33(4): 97-101. DOI: 10.3969/j.issn.1001-2486.2011.04.019 [22] 赵彦珍. 基于GNSS的高轨卫星定位技术研究[D]. 北京: 中国科学院国家空间科学中心, 2016. -




 点击查看大图
点击查看大图
图(10) / 表(8)
计量
- 文章访问数: 439
- HTML全文浏览量: 76
- PDF下载量: 51
- 被引次数: 0
