

GNSS/UWB based indoor and outdoor continuous positioning method
-
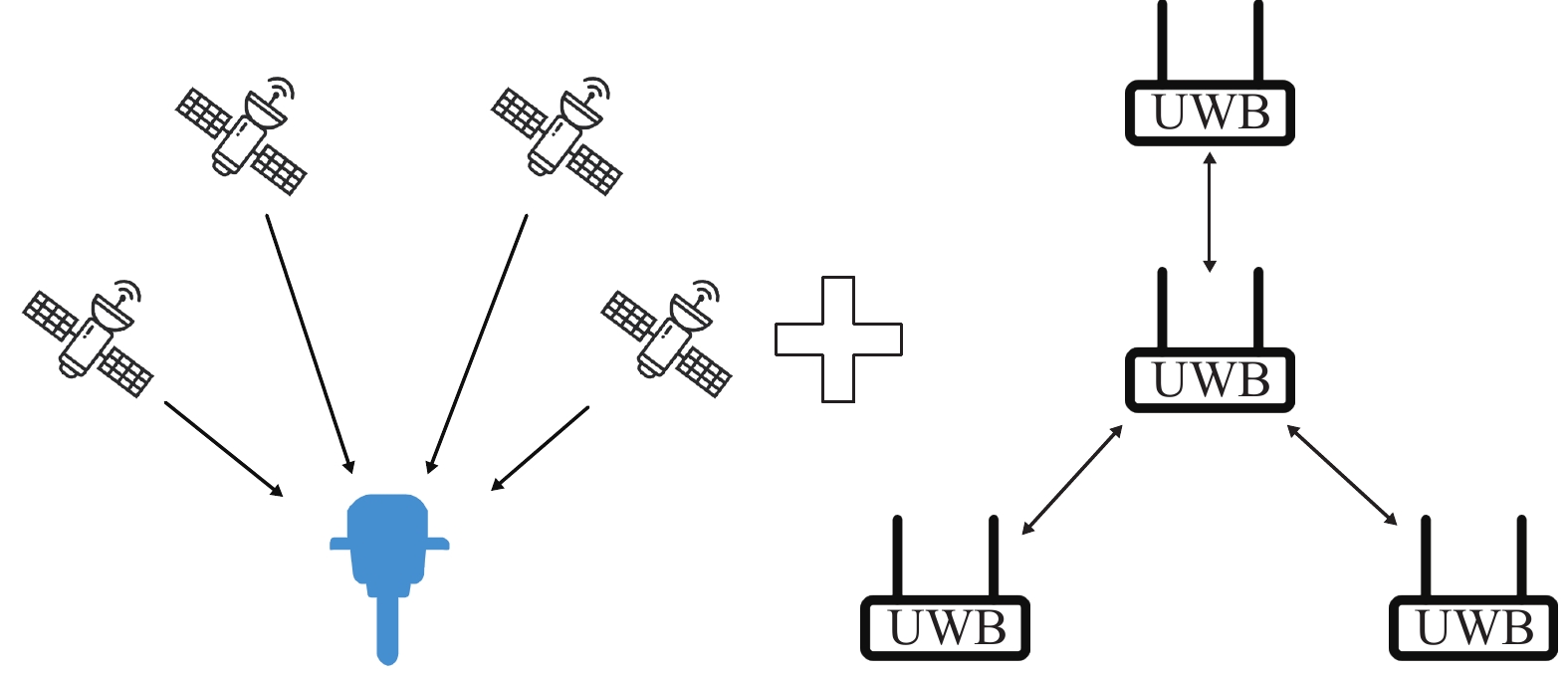
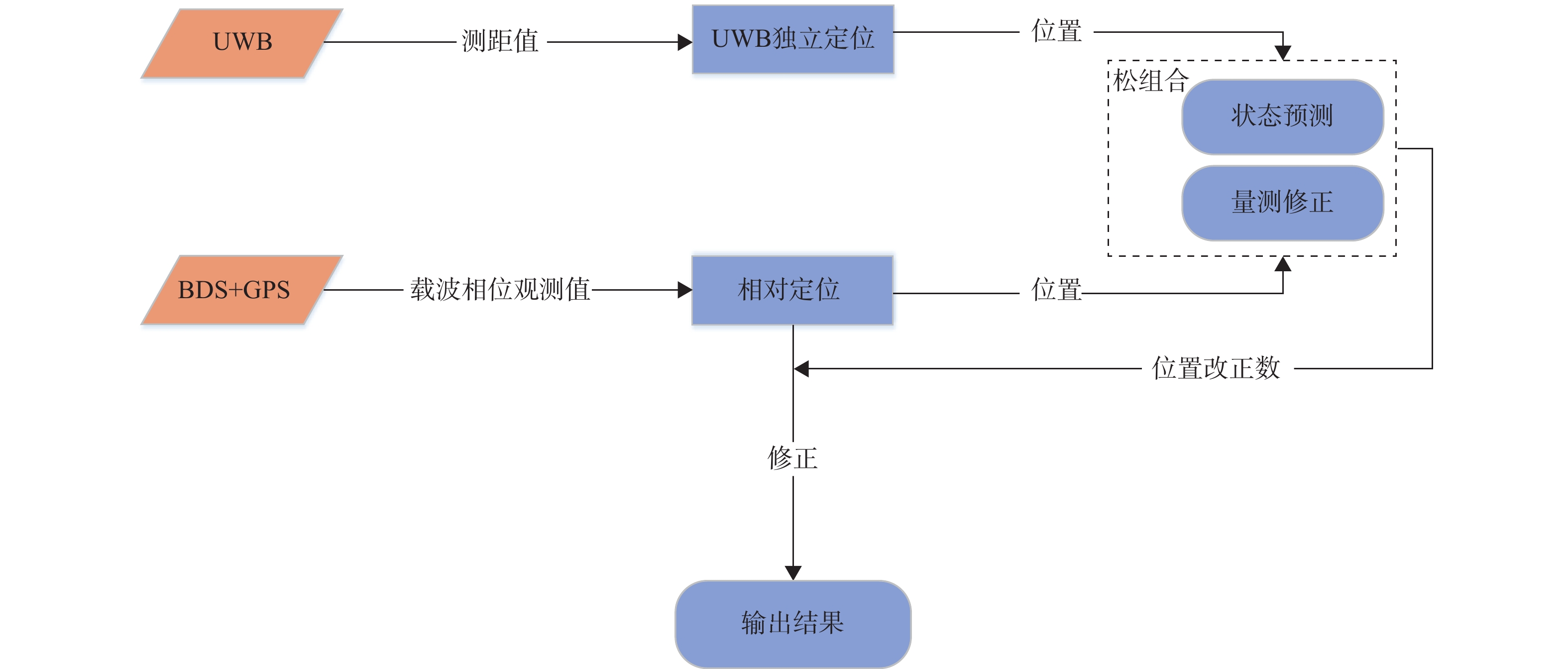
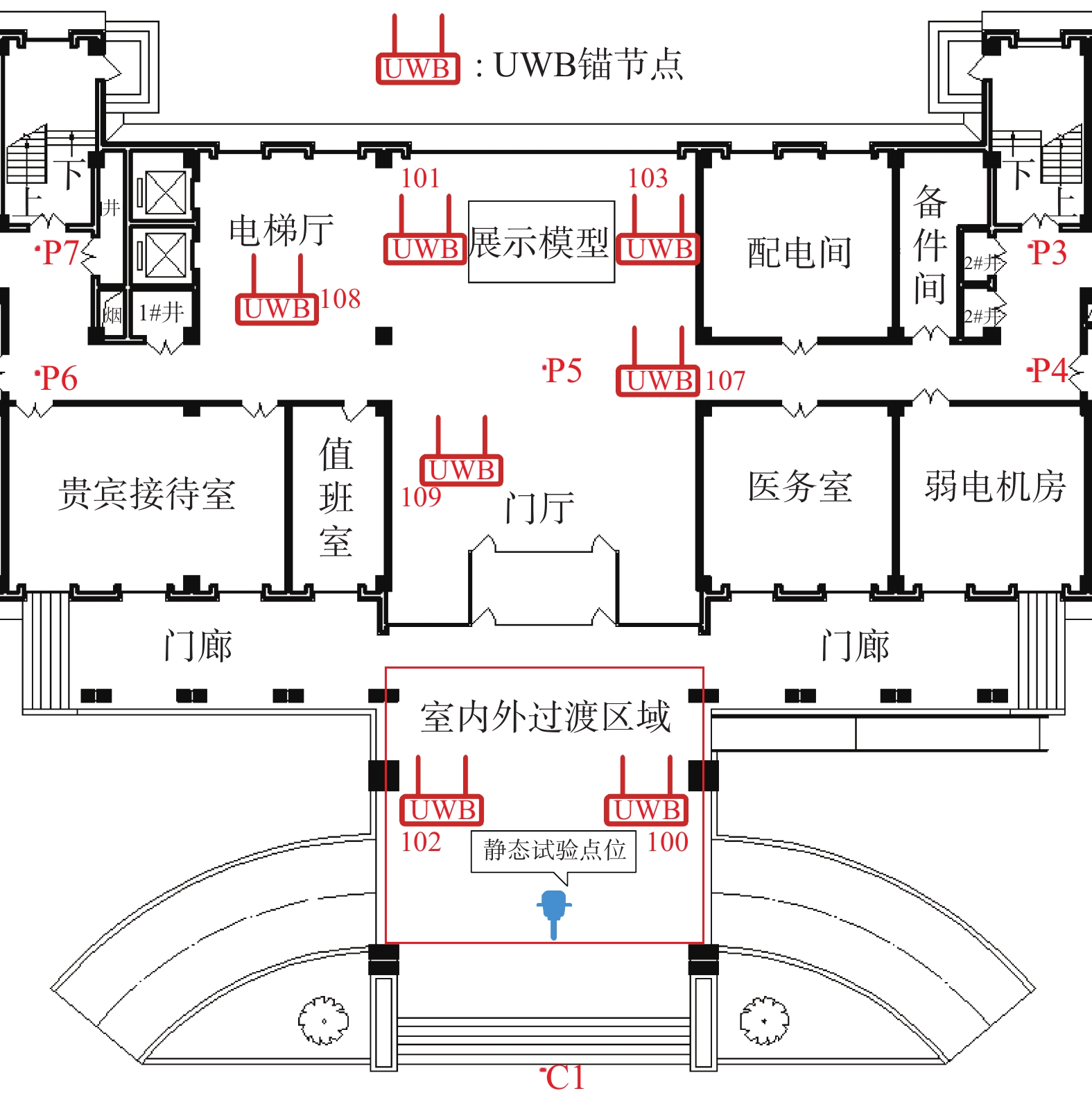
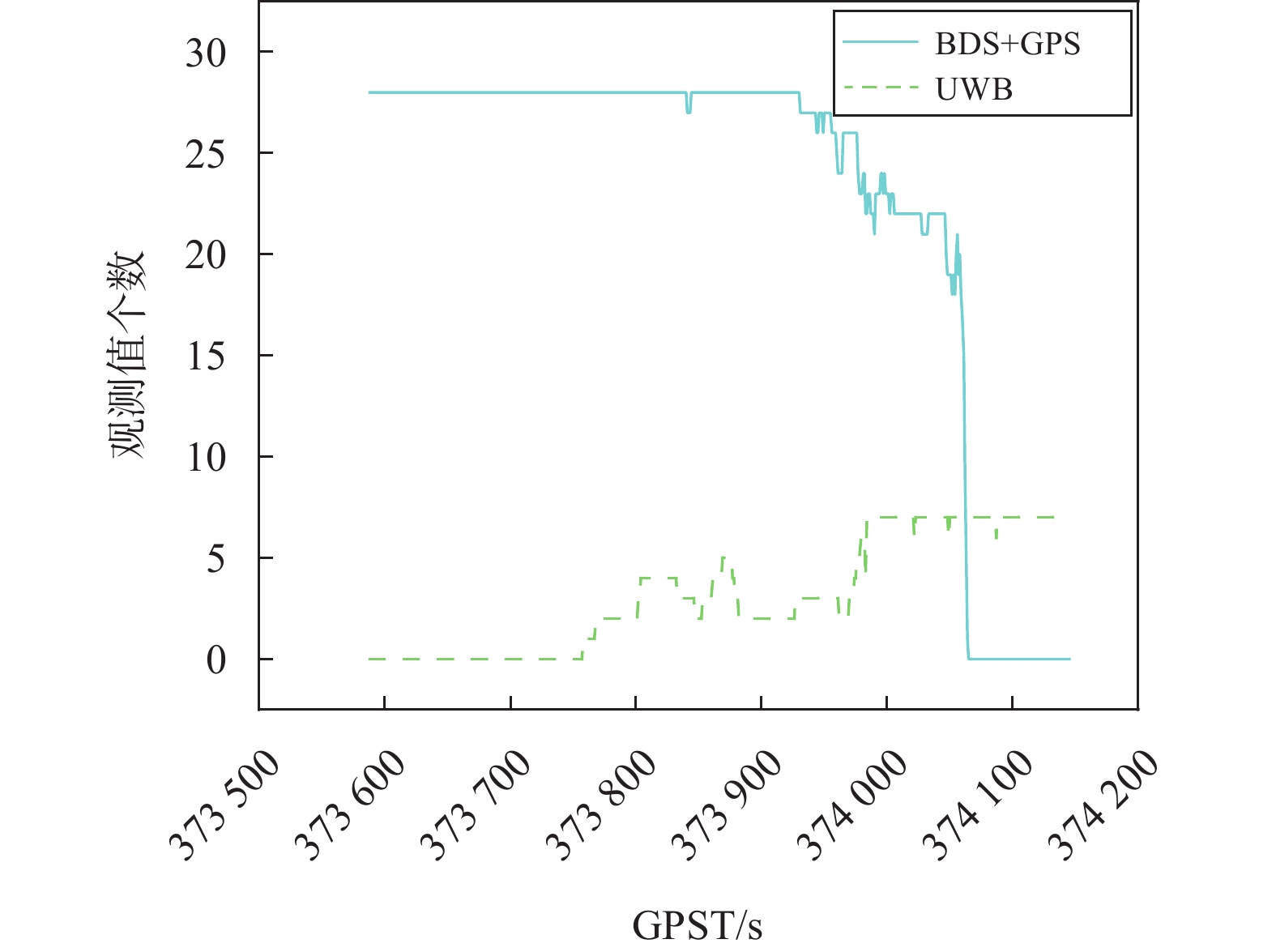
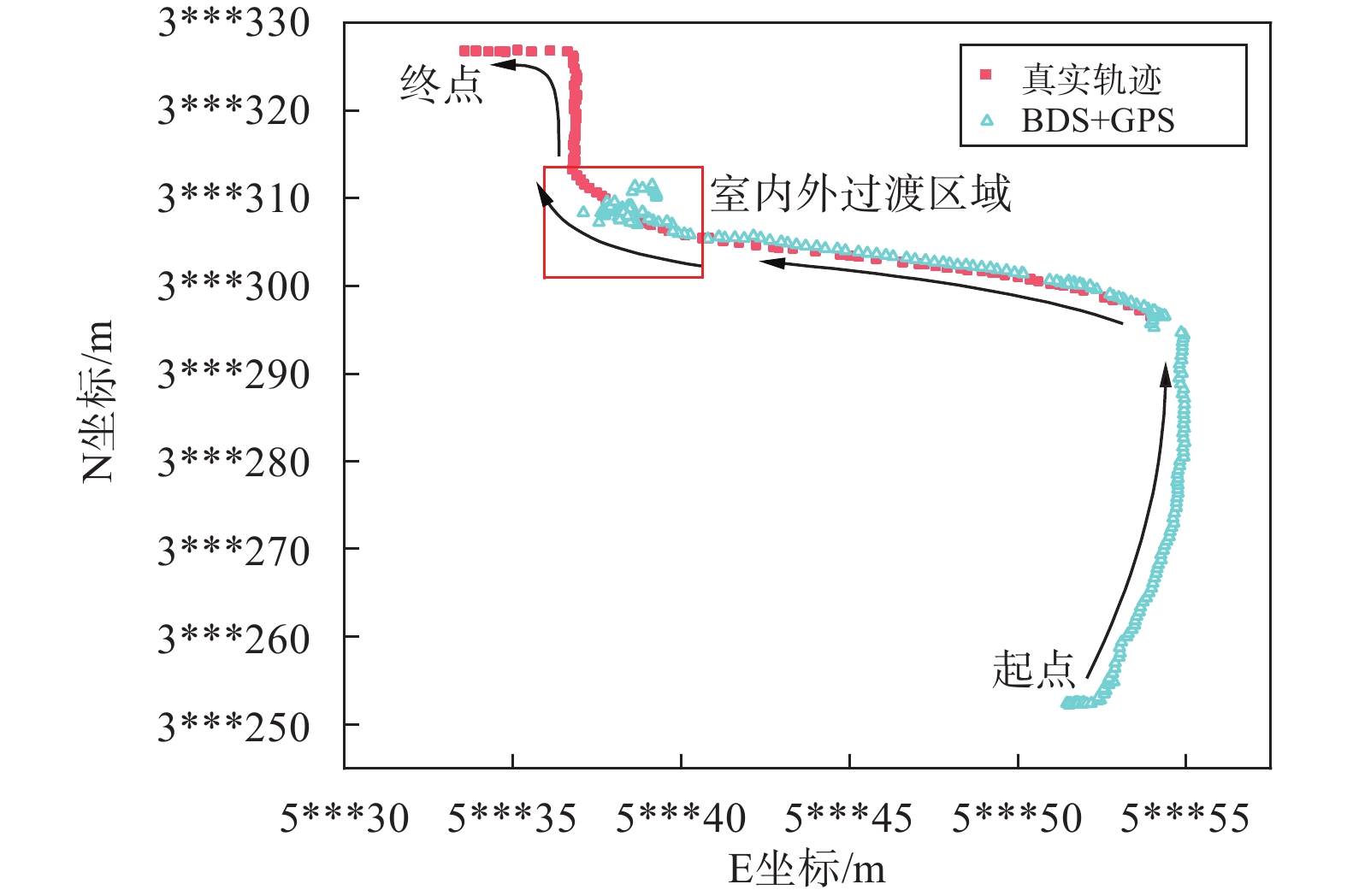
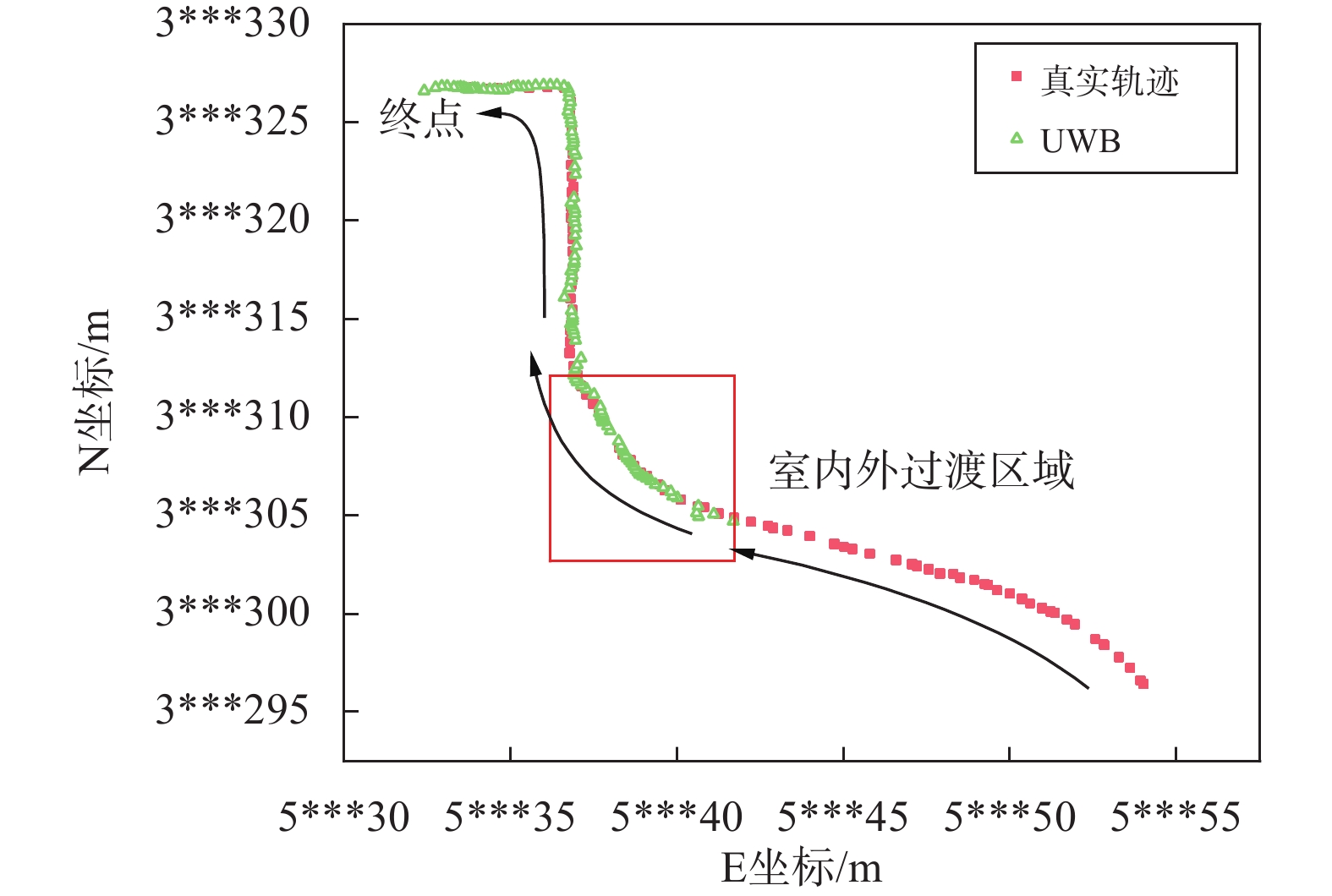
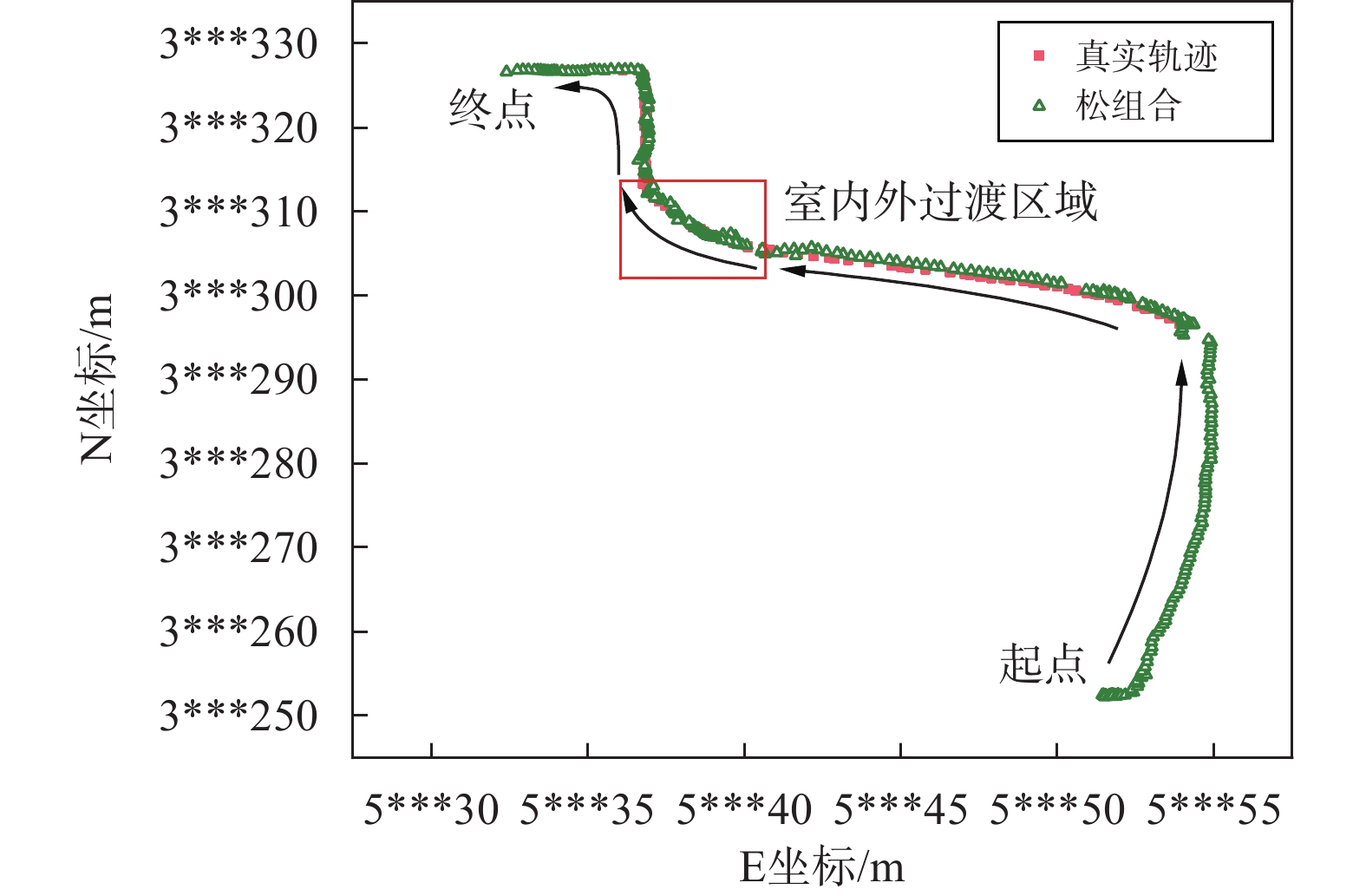
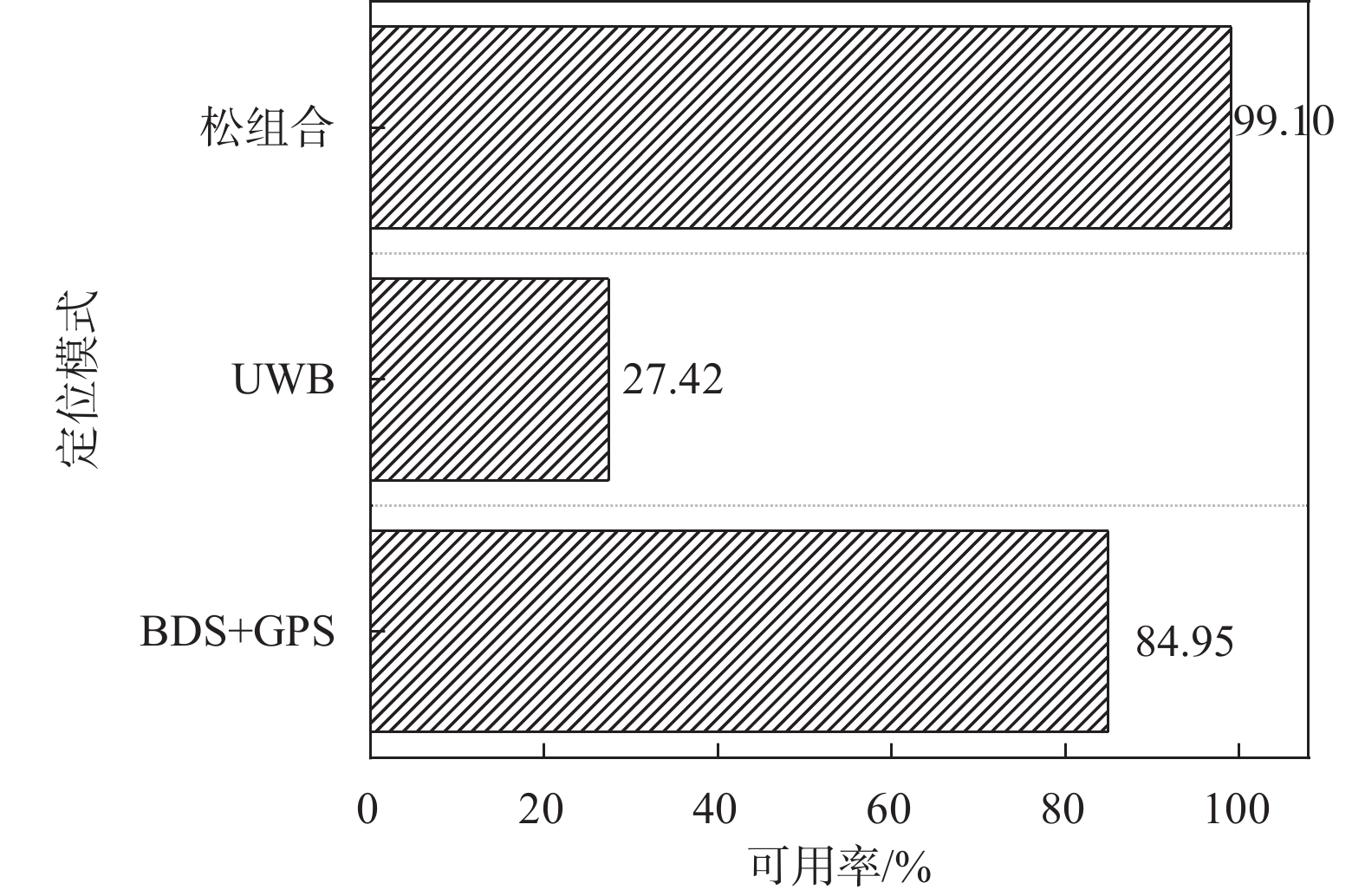
摘要: 全球卫星导航系统(GNSS)与超宽带(UWB)等定位系统在室内外复杂环境下作用范围有限,并且单一定位源均无法获得从室外到室内连续可靠的定位结果等问题,针对北斗卫星导航系统(BDS)+GPS/UWB松组合定位方法展开研究,设计了室内外动态定位实验与过渡区域静态定位实验,利用扩展卡尔曼滤波器(EKF)对定位误差状态进行最优估计,并对BDS+GPS组合、UWB以及BDS+GPS/UWB松组合三种定位模式进行分析评价. 实验结果表明:在室内外的过渡区域,BDS+GPS/UWB松组合改善了GNSS-实时动态定位(RTK)的定位精度,扩展了GNSS-RTK的作用范围;BDS+GPS/UWB松组合相比于各单一定位源在一定程度上提高了系统从室外到室内定位的连续性与定位结果的可用性.Abstract: To address the problems that Global Navigation Satellite System (GNSS) and ultra-wideband (UWB) positioning systems have limited range in complex indoor and outdoor environments, and that no single source can obtain continuous and reliable positioning results from outdoor to indoor. In this paper, we investigate the BeiDou Navigation Satellite System (BDS)+GPS/UWB loose combination positioning method, design dynamic indoor and outdoor positioning experiments and static positioning experiments in the transition area, use the extended Kalman filter to optimally estimate the positioning error state, and analyze and evaluate three positioning modes: BDS+GPS combination, UWB and loose combination. The experimental results show that the combination of BDS+GPS/UWB improves the positioning accuracy and extends the range of GNSS-real-time kinematic (GNSS-RTK) in the indoor-outdoor transition area, and the combination of BDS+GPS/UWB improves the continuity and usability of the system from outdoor to indoor positioning compared with each single source.
-
表 1 静态实验定位误差统计
m 定位模式 北方向误差 东方向误差 点位平面误差 UWB 0.333 0 0.021 0 0.333 7 BDS+GPS 0.387 8 0.890 6 0.971 4 BDS+GPS/UWB松组合 0.321 4 0.198 2 0.377 6  下载: 导出CSV
下载: 导出CSV
-
[1] 刘振耀. 基于UWB/GNSS/MIMU的室内外无缝定位技术研究[D]. 郑州: 解放军信息工程大学, 2017. [2] 邓中亮, 尹露, 唐诗浩, 等. 室内定位关键技术综述[J]. 导航定位与授时, 2018, 5(3): 14-23. DOI: 10.19306/j.cnki.2095-8110.2018.03.003 [3] 蔚保国, 李雅宁, 王永杰. 室内混合智能定位系统仿真平台框架研究[J]. 导航定位与授时, 2020, 7(6): 12-21. DOI: 10.19306/j.cnki.2095-8110.2020.06.002 [4] 蔚保国, 鲍亚川, 杨梦焕, 等. 通导一体化概念框架与关键技术研究进展[J]. 导航定位与授时, 2022, 9(2): 1-14. DOI: 10.19306/j.cnki.2095-8110.2022.02.001 [5] HAN S W, WANG J, LIU F, et al. An emergency seamless positioning technique based on ad hoc UWB networking using robust EKF[J]. Sensors, 2019, 19(14): 3135. DOI: 10.3390/s19143135 [6] 郝雨时, 徐爱功, 隋心. GNSS/UWB高精度室内外组合定位方法[J]. 导航定位学报, 2016, 4(4): 17-23. DOI: 10.16547/j.cnki.10-1096.20160404 [7] 林志东, 何情强. 超宽带距离测量误差来源分析[J]. 厦门理工学院学报, 2019, 27(1): 47-52. DOI: 10.19697/j.cnki.1673-4432.201901008 [8] 赵胤植, 邹进贵, 蔡礼贤, 等. 一种顾及电子元件延迟的超宽带室内定位方法[J]. 测绘通报, 2022(4): 1-5,31. [9] 王争, 蒋浩晨, 高娟, 等. 超宽带室内定位算法综述[J]. 电子设计工程, 2021, 29(21): 141-145. DOI: 10.14022/j.issn1674-6236.2021.21.030 [10] 肖竹, 黑永强, 于全, 等. 脉冲超宽带定位技术综述[J]. 中国科学(F辑:信息科学), 2009, 39(10): 1112-1124. [11] HUANG Z C, JIN S G, SU K, et al. Multi-GNSS precise point positioning with UWB tightly coupled integration[J]. Sensors, 2022, 22(6): 2232. DOI: 10.3390/s22062232 [12] CHIU D S, MACGOUGAN G, O’KEEFE K. UWB assisted GPS RTK in hostile environments[C]// The Satellite Division of the Institute of Navigation 20th International Technical Meeting, 2008: 532-542. [13] CHIU D S, O’KEEFE K P. Seamless outdoor-to-indoor pedestrian navigation using GPS and UWB[C]//The 21st International Technical Meeting of the Satellite Division of the Institute of Navigation, 2008. [14] CHIU D S. Ultra wideband augmented GPS[D]. Canada : University of Calgary, 2008. [15] MACGOUGAN G, O’KEEFE K P, CHIU D S. Multiple UWB range assisted GPS RTK in hostile environments[C]// The Satellite Division of the Institute of Navigation 20th International Technical Meeting, 2008: 3020-3035. [16] MACGOUGAN G, O’KEEFE K P, KLUKAS R. Tightly-coupled GPS/UWB positioning[J]. IEEE international conference on ultra-wideband, 2009. DOI: 10.1109/ICUWB.2009.5288683 [17] MACGOUGAN G, O’KEEFE K P, KLUKAS R. Tightly-coupled GPS/UWB integration[J]. Journal of navigation, 2010, 63(1): 1-22. DOI: 10.1017/S0373463309990257 [18] HU H, XIE X F, GAO J X, et al. GPS-BDS-Galileo double-differenced stochastic model refinement based on least-squares variance component estimation[J]. Journal of navigation, 2021, 74(6): 1381-1396. DOI: 10.1017/S0373463321000564 [19] MACGOUGAN G, O’KEEFE K P, KLUKAS R. Ultra-wideband ranging precision and accuracy[J]. Measurement science and technology, 2009, 20(9): 095105. DOI: 10.1088/0957-0233/20/9/095105 [20] WANG J, WANG M M, YANG D, et al. UWB positioning algorithm and accuracy evaluation for different indoor scenes[J]. International journal of image and data fusion, 2021, 12(3): 1-23. DOI: 10.1080/19479832.2020.1864788 [21] ZHAO Y Z, ZOU J G, GUO J M, et al. A novel ultra-wideband double difference indoor positioning method with additional baseline constraint[J]. International journal of GEO-information, 2021, 10(10): 634. DOI: 10.3390/ijgi10100634 [22] ALLAN D W. Time and frequency (time-domain) characterization, estimation, and prediction of precision clocks and oscillators[J]. IEEE transactions on ultrasonics ferroelectrics and frequency control, 1987, 34(6): 647-654. DOI: 10.1109/T-UFFC.1987.26997 [23] MACGOUGAN G D. Real-time kinematic surveying using tightly-coupled GPS and ultra-wideband ranging[D]. Canada: University of Calgary, 2009. [24] HU F J, WU G. Distributed error correction of EKF algorithm in multi-sensor fusion localization model[J]. IEEE access, 2020, 8(99): 93211-93218. DOI: 10.1109/ACCESS.2020.2995170 -




 点击查看大图
点击查看大图
图(12) / 表(1)
计量
- 文章访问数: 478
- HTML全文浏览量: 109
- PDF下载量: 54
- 被引次数: 0
