

Estimation and characteristics analysis of BDS-3 uncalibrated phase delay based on different PPP models
-
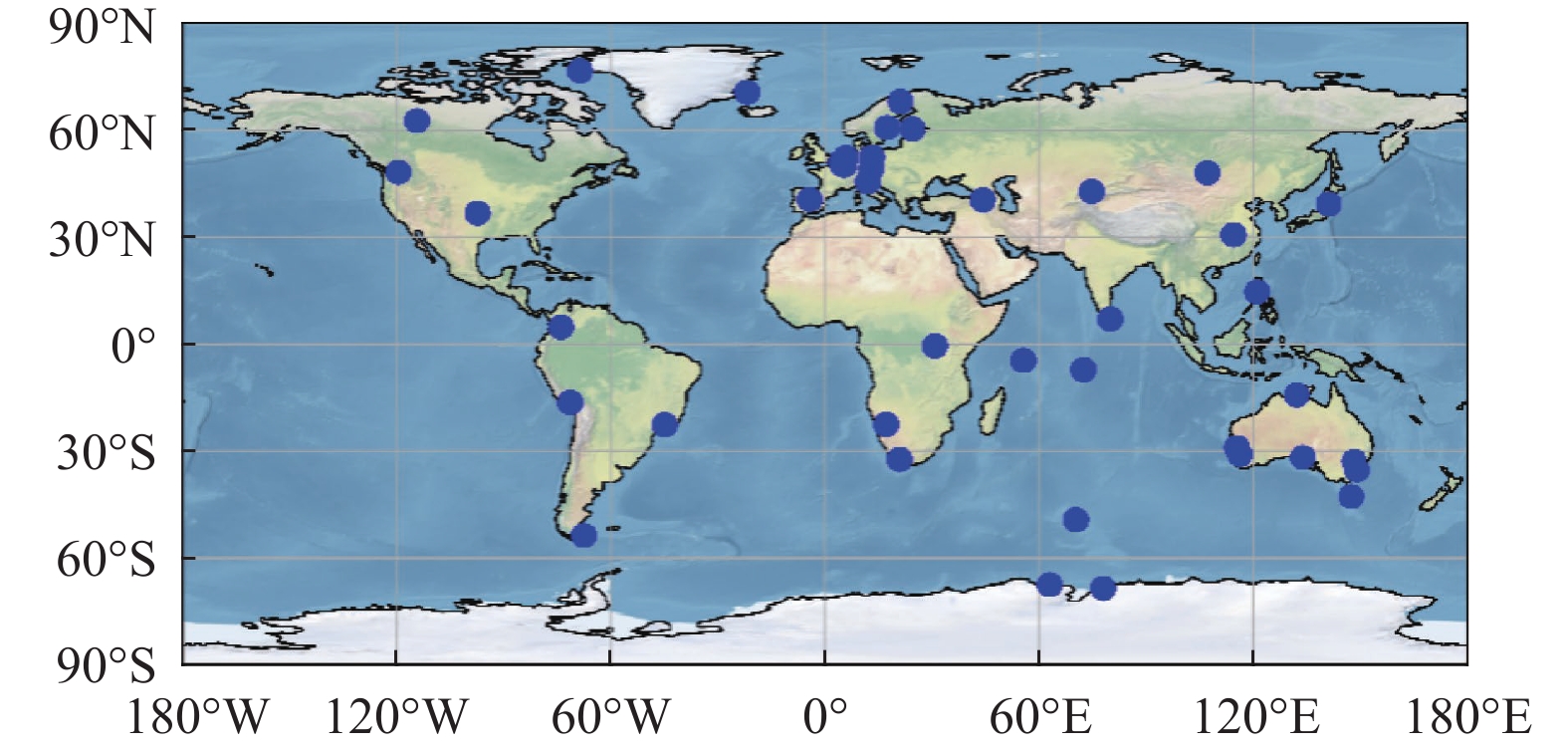
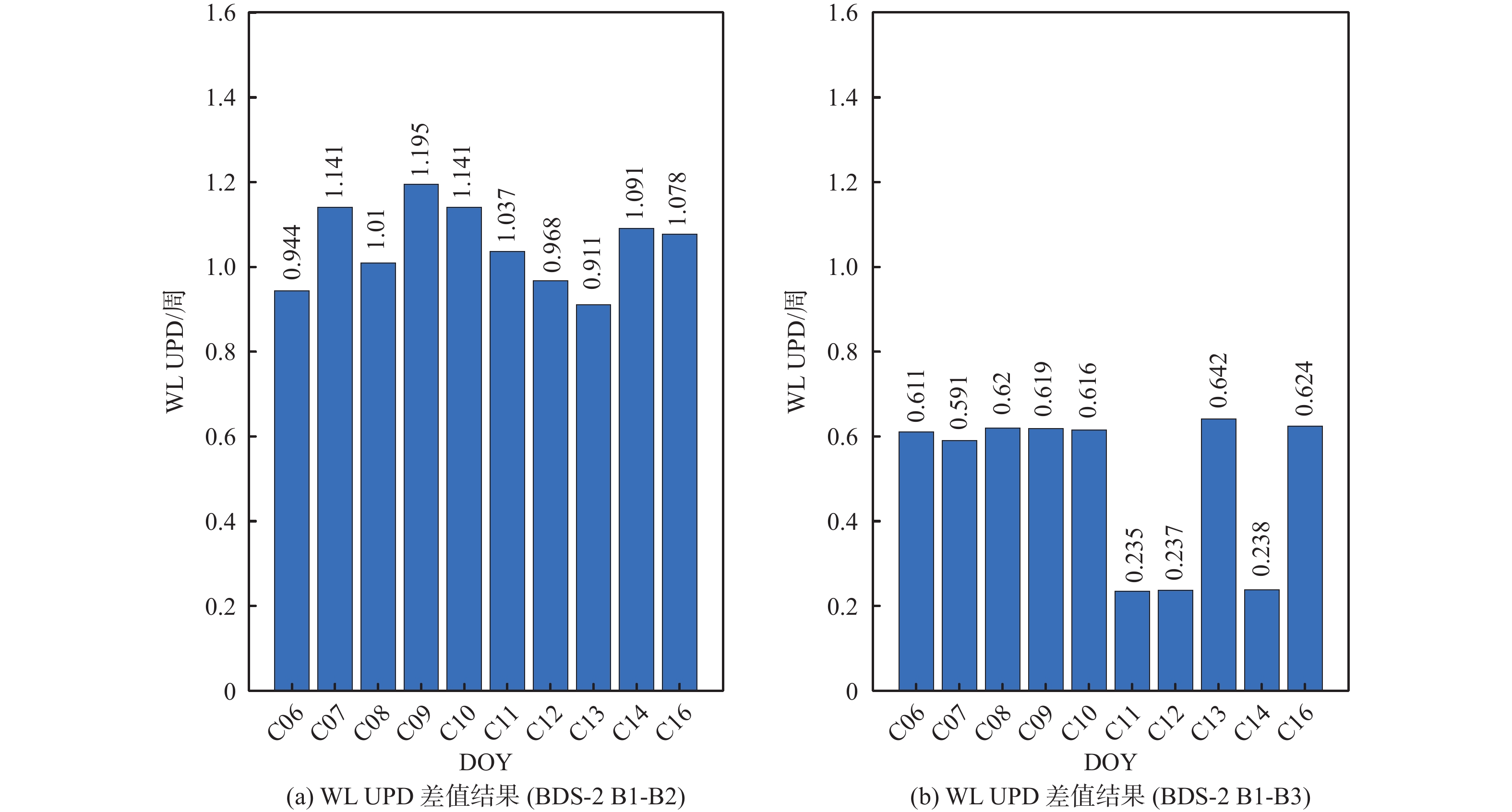
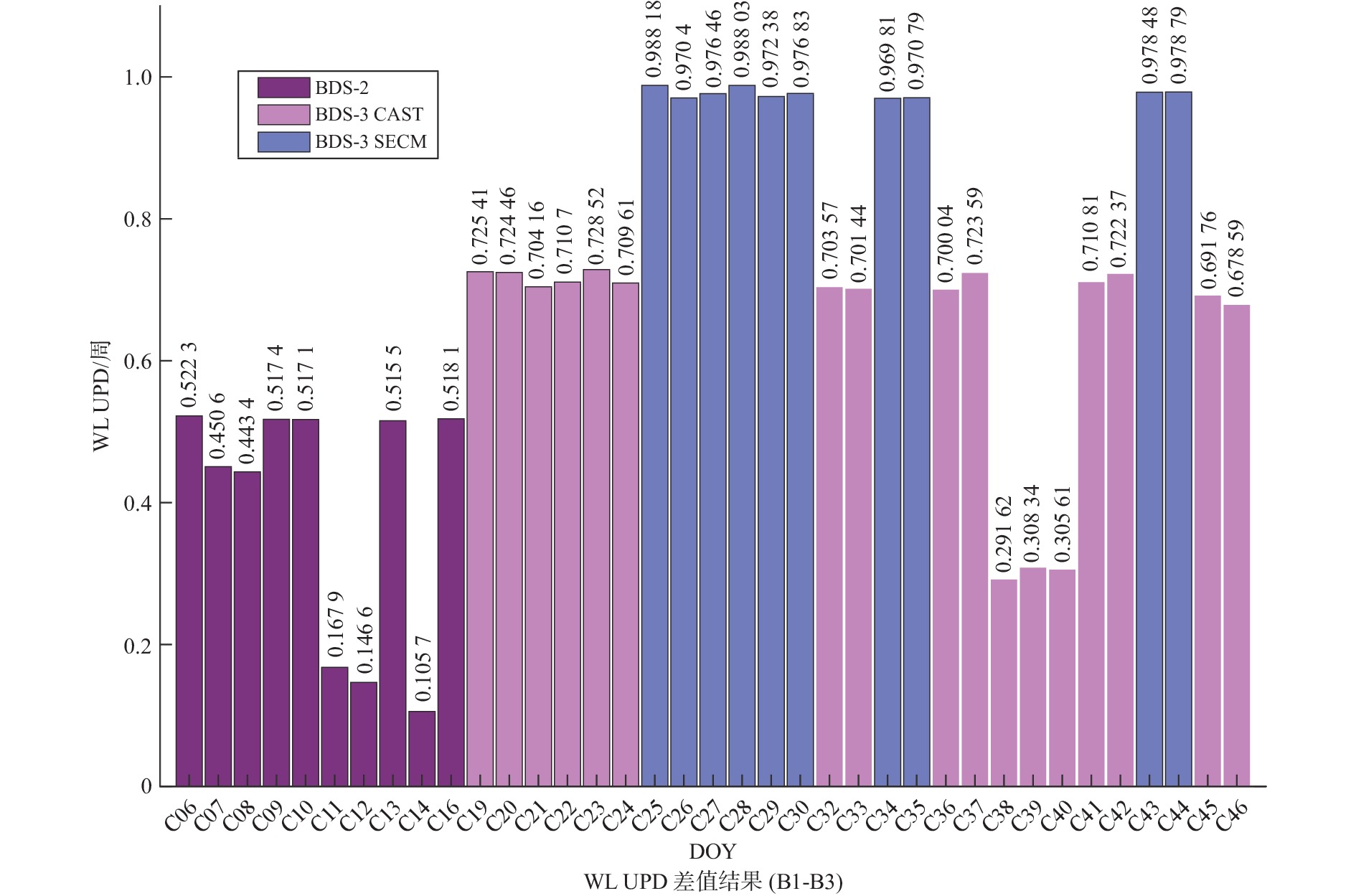
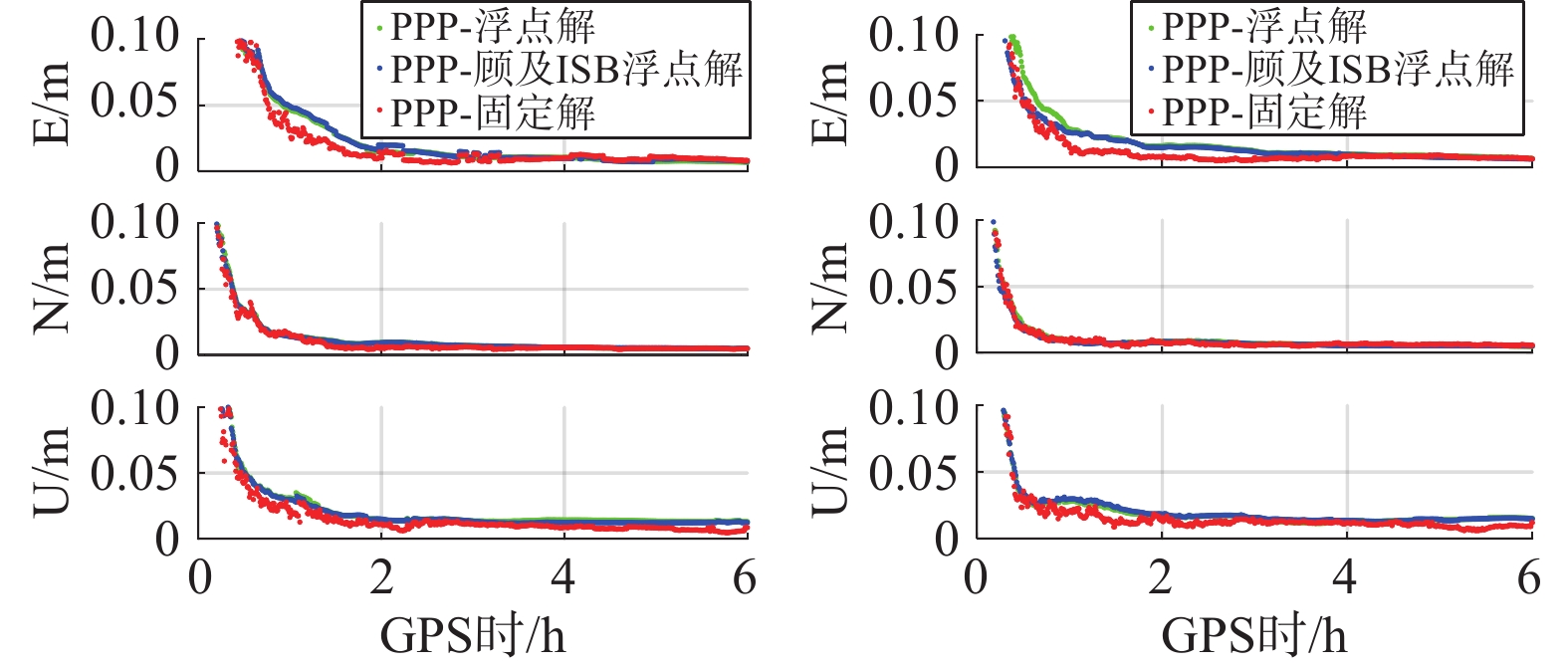
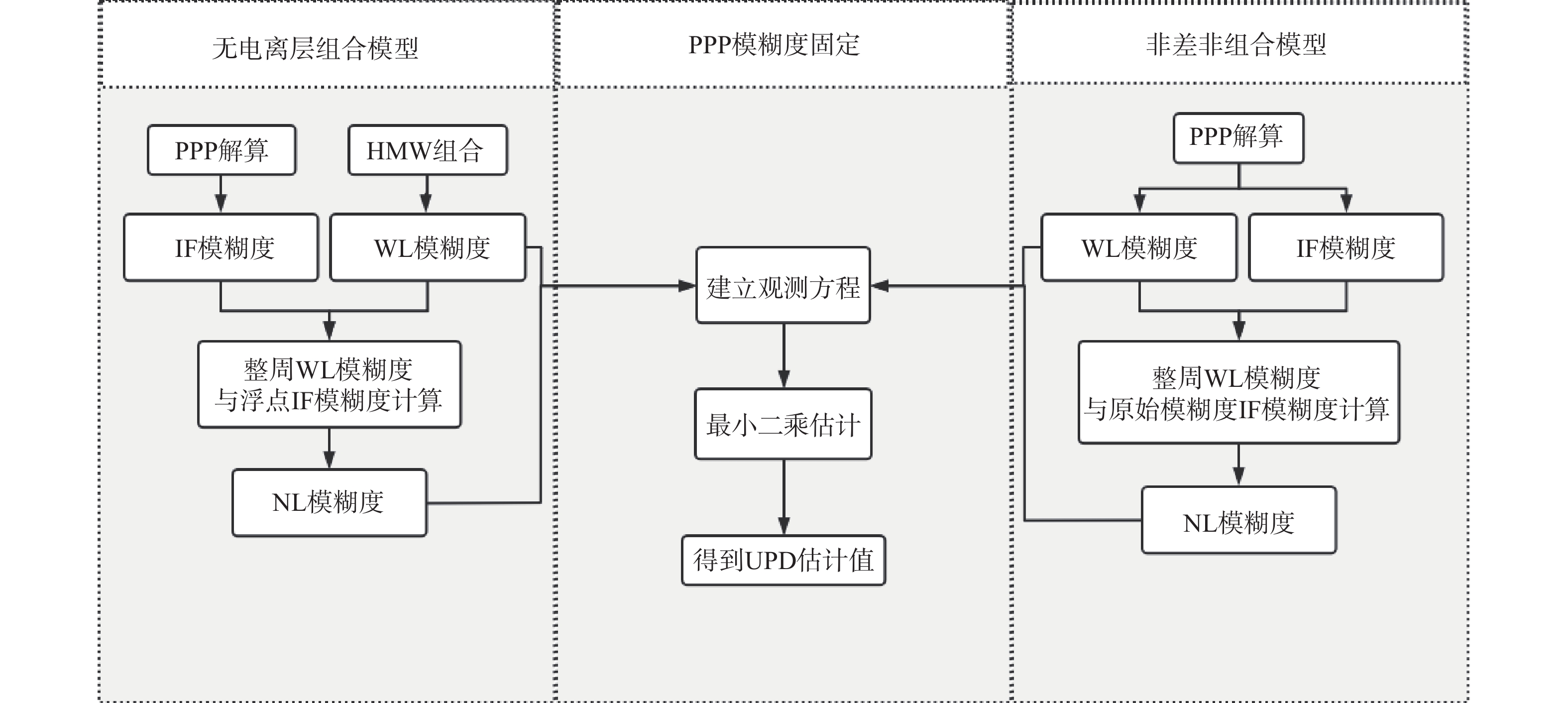
摘要: 相位小数偏差(UPD)的精确估计是实现精密单点定位(PPP)非差模糊度固定的重要前提. 常用的PPP模型主要分为无电离层组合(IF)模型与非差非组合模型两类,针对两类模型所采用的UPD估计方法有所不同. 首先从理论上推导证明了在采用相同处理策略的前提下,基于IF模型与非差非组合模型UPD估计的一致性;进一步采用全球均匀分布的45个国际GNSS服务(IGS)测站观测数据估计了北斗三号全球卫星导航系统(BDS-3) UPD产品,并分析两种估计模型获得的UPD产品的时间稳定性与一致性. 结果表明:BDS-3宽巷(WL) UPD与窄巷(NL) UPD均保持较高的稳定性,10日WL UPD的平均标准差为0.060 7,单日NL UPD平均标准差为0.059 9. 针对北斗二号卫星导航系统(BDS-2),两种模型估计得到的UPD结果具有较高的一致性;然而,BDS-3卫星的UPD结果出现与卫星轨道类型和生产厂家的相关特性,不同轨道类型、不同生产厂家之间的卫星UPD存在0.5周左右的显著差异,同一轨道类型、同一生产厂家的北斗卫星之间具有一致性,推测BDS-3不同轨道类型、不同生产厂家生产的卫星对应的接收机端硬件延迟存在系统性偏差. 通过估计不同轨道类型、不同生产厂家卫星对应的接收机端硬件延迟偏离进一步验证了该结论,同时探讨了该新特性对于PPP与模糊度固定的影响.
-
关键词:
- 精密单点定位(PPP) /
- 相位小数偏差(UPD) /
- 北斗三号全球卫星导航系统(BDS-3) /
- 无电离层组合(IF) /
- 非差非组合
Abstract: Accurate estimation of uncalibrated phase delay (UPD) is an important precondition for ambiguity resolution of precise point positioning (PPP). The commonly used PPP models are mainly divided into the ionosphere-free (IF) combination model and the undifferenced and uncombined model, and the UPD estimation methods used for the two models are different. In this paper, the consistency of UPD estimation based on IF combination model and uncombined model is proved theoretically under the premise of using the same processing strategy. Furthermore, the UPD products of BDS-3 were estimated by using the observation data of 45 International GNSS Service (IGS) stations uniformly distributed around the world, and the time stability and consistency of UPD products obtained by the two estimation models were analyzed. The results show that the UPD of wide-lane and narrow-lane in BDS-3 maintain high stability. The average standard deviation of UPD of wide-lane in ten days is 0.0607, and that of narrow-lane in one day is 0.059 9. For BDS-2 satellites, the UPD results estimated by the two models are highly consistent. However, the UPD results of BDS-3 satellites are related to the characteristics of satellite orbit types and manufacturers. There is a significant difference in UPD between different orbit types and manufacturers of about 0.5 weeks, but there is consistency among BDS satellites of the same orbit type and manufacturer. It can be concluded that the hardware delay of the receiver corresponding to satellites produced by different orbital types and different manufacturers of BDS-3 has a systematic deviation. The estimation of inter-satellite-type bias in PPP further demonstrates this conclusion. Finally, the impact of these biased on PPP and PPP AR was carefully discussed. -
表 1 BDS-3不同厂商、不同轨道类型卫星ISB估值与差值统计
m 测站名 测站类型 CAST_MEO CAST_IGSO SECM CAST_MEO-SECM_MEO CAST_MEO-CAST_IGSO AREG SEPT POLARX5 −2.01 −2.65 −2.38 0.37 0.64 MIZU SEPT ASTERX4 −1.68 −1.88 −1.86 0.17 0.20 NNOR SEPT POLARX5TR −1.71 −2.02 −1.90 0.19 0.31 PADO STONEX SC2200 0.34 1.40 −0.66 0.99 −1.07 POL2 JAVAD TRE_3 DELTA 1.62 1.72 0.29 1.34 −0.10 KIR8 TRIMBLE ALLOY −10.81 −12.37 −13.10 2.29 1.56 YAR2 TRIMBLE ALLOY 2.44 1.27 0.34 2.10 1.17 POTS JAVAD TRE_3 1.10 1.45 0.16 0.95 −0.35 ULAB JAVAD TRE_3 1.08 1.40 0.26 0.82 −0.32 WUH2 JAVAD TRE_3 1.37 1.70 0.38 0.99 −0.34 SUTM JAVAD TRE_3 1.50 1.76 0.55 0.96 −0.26  下载: 导出CSV
下载: 导出CSV
-
[1] 杨元喜. 北斗卫星导航系统的进展、贡献与挑战[J]. 测绘学报, 2010, 39(1): 1-6. [2] GE M, GENDT G, ROTHACHER M, et al. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations[J]. Journal of geodesy, 2008, 82(7): 389-399. DOI: 10.1007/s00190-007-0187-4 [3] 李星星, 张小红, 李盼. 固定非差整数模糊度的PPP快速精密定位定轨[J]. 地球物理学报, 2012, 55(3): 833-840. DOI: 10.6038/j.issn.0001-5733.2012.03.013 [4] 宋保丰, 郝金明, 师一帅, 等. 非差FCB估计及其在PPP模糊度固定中的应用[J]. 全球定位系统, 2019, 44(3): 33-37. DOI: 10.13442/j.gnss.1008-9268.2019.03.005 [5] KOUBA J, HEROUS P. Precise point positioning using IGS orbit and clock products[J]. GPS solutions, 2001, 5(2): 12-28. DOI: 10.1007/PL00012883 [6] 郝明, 王庆良, 崔笃信. GPS精密单点定位快速收敛方法研究[J]. 大地测量与地球动力学, 2009, 29(2): 88-91. DOI: 10.14075/j.jgg.2009.02.009 [7] ABDEL-SALAM M, GAO Y. Precise GPS atmosphere sensing based on un-differenced observations[C]//Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation, 2004. [8] CAO X Y, SHEN F, ZHANG S J, et al. Satellite availability and positioning performance of uncombined precise point positioning using BeiDou-2 and BeiDou-3 multi-frequency signals[J]. Advances in space research, 2021, 67(4): 1303-1316. DOI: 10.1016/j.asr.2020.11.011 [9] 辜声峰. 多频GNSS非差非组合精密数据处理理论及其应用[D]. 武汉: 武汉大学, 2013. [10] 周峰. 多系统GNSS非差非组合精密单点定位相关理论和方法研究[D]. 上海: 华东师范大学, 2018. [11] 李星星. GNSS 精密单点定位及非差模糊度快速确定方法研究[D]. 武汉: 武汉大学, 2013. [12] WÜBBENA G. Software developments for geodetic positioning with GPS using TI-4100 code and carrier measurements[C]//Proceedings of the First International Symposium on Precise Positioning with the Global Positioning System, 1985. [13] MELBOURNE W G. The case for ranging in GPS based geodetic systems[C]// Proceedings of First International Symposium on Precise Positioning with the Global Positing System, 1985: 373-386. [14] 张且且, 赵龙, 周建华. 基于无电离层组合/非差非组合混合观测模型的精密单点定位[C]//第十一届中国卫星导航年会, 2020. [15] WANG J, HUANG G W, YANG Y X, et al. FCB estimation with three diferent PPP models: equivalence analysis and experiment tests[J]. GPS solutions, 2019, 23(4): 93. DOI: 10.1007/s10291-019-0887-2 [16] 李昕. 多频率多星座 GNSS 快速精密定位关键技术研究[D]. 武汉: 武汉大学, 2021. [17] 李昕. Multi-GNSS精密单点定位固定解方法与性能评估[D]. 武汉: 武汉大学, 2018. [18] 刘格格. 多频率多星座GNSS相位偏差估计与非差模糊度快速固定[D]. 武汉: 武汉大学, 2021. [19] 李浩东, 赵齐乐, 陶钧, 等. 北斗三号卫星 FCB 估计及其模糊度固定 [J/OL]. (2022-02-18)[2022-03-03]. 武汉大学学报(信息科学版). https://kns.cnki.net/kcms/detail/42.1676.TN.202218.1028.002.html [20] 李昕, 袁勇强, 张柯柯, 等. 联合GEO/IGSO/MEO的北斗PPP模糊度固定方法与试验分析[J]. 测绘学报, 2018, 47(3): 324-331. DOI: 10.11947/j.AGCS.2018.20170341 [21] 张小红, 李盼, 李星星, 等. 宽巷载波相位模糊度小数偏差时变特性分析[J]. 测绘学报, 2013, 42(6): 798-803. -




 点击查看大图
点击查看大图
图(8) / 表(1)
计量
- 文章访问数: 363
- HTML全文浏览量: 310
- PDF下载量: 91
- 被引次数: 0
