

Application of BDS in unmanned vehicle for land-based intelligent inspection
-
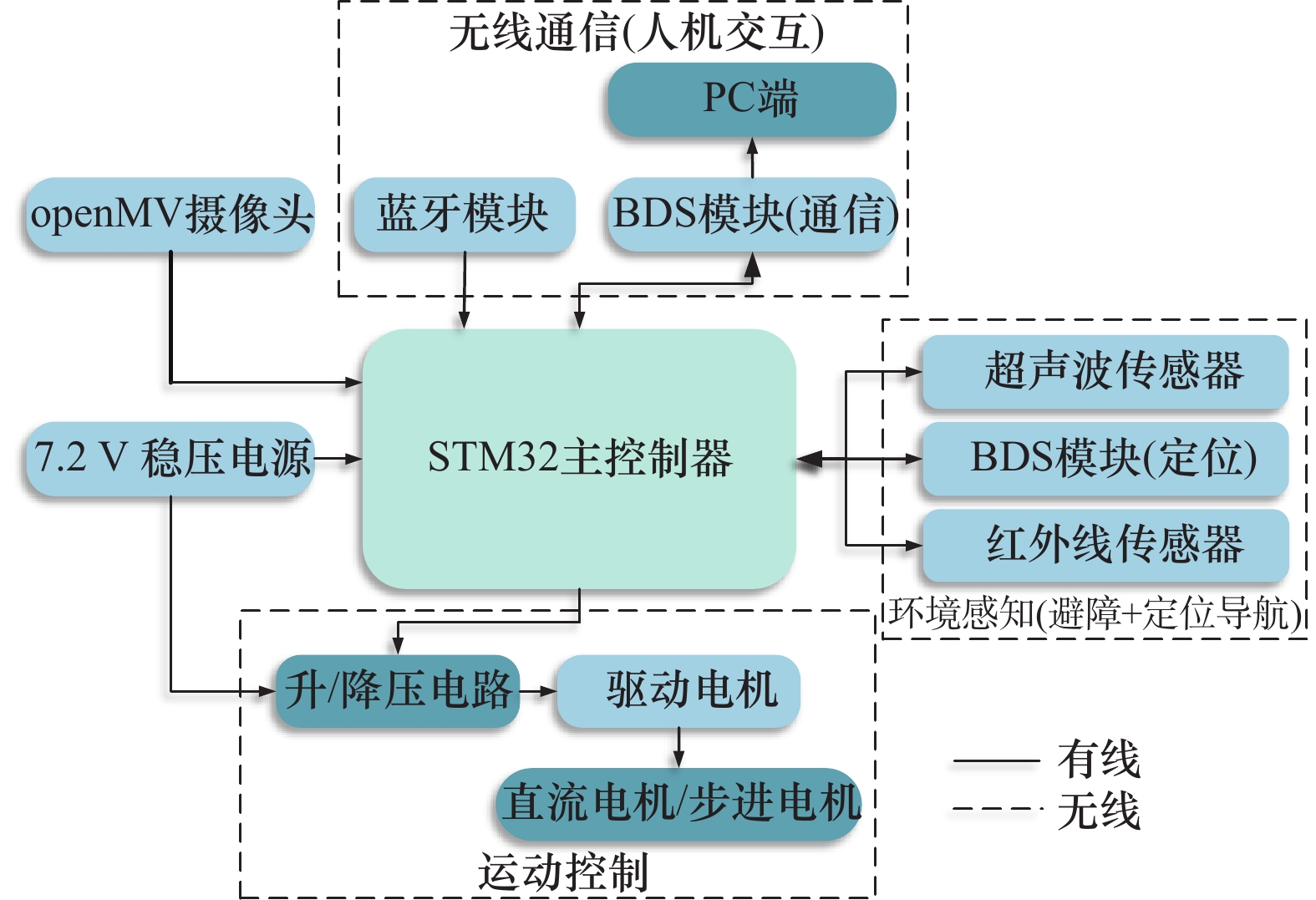
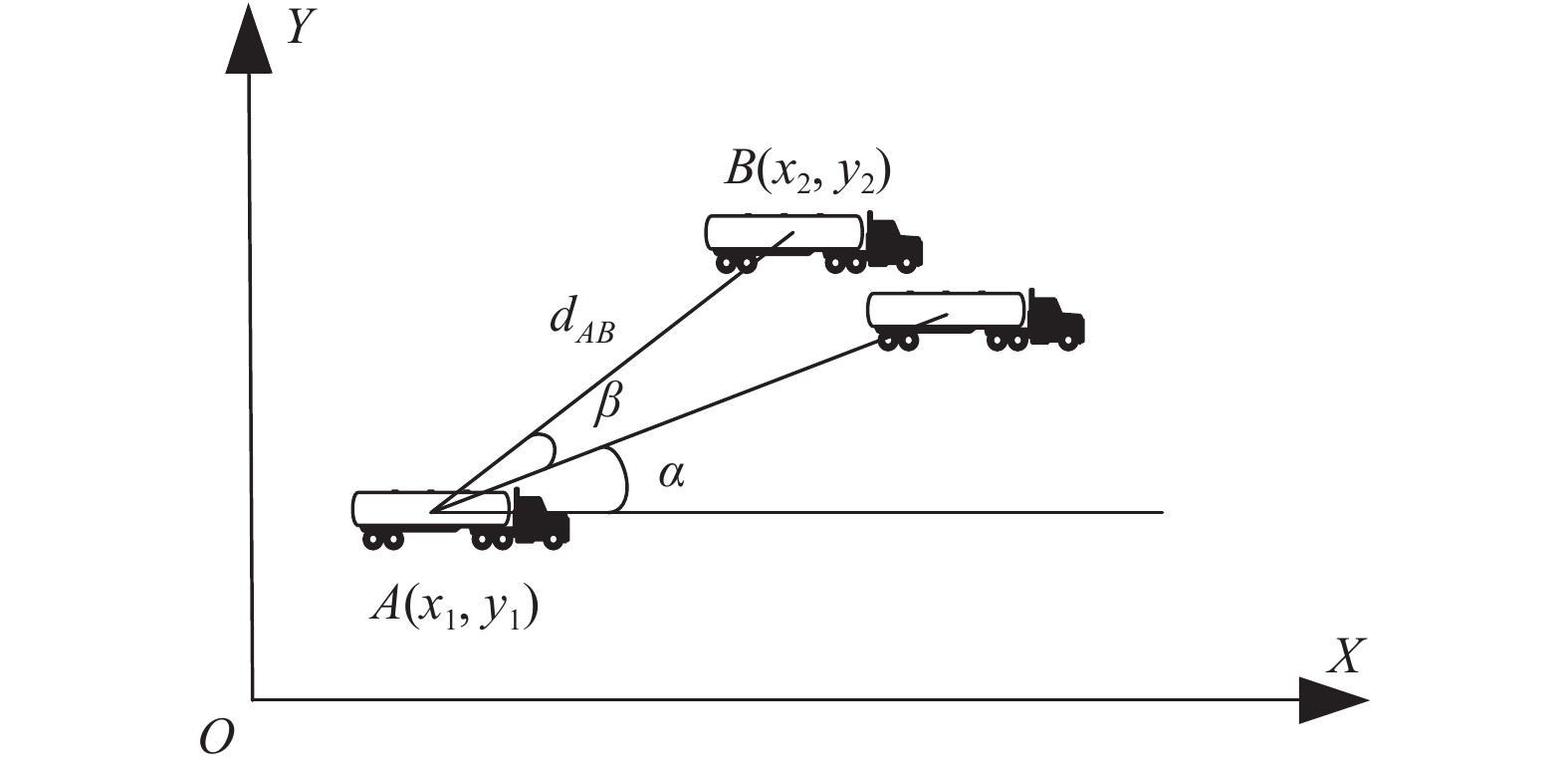
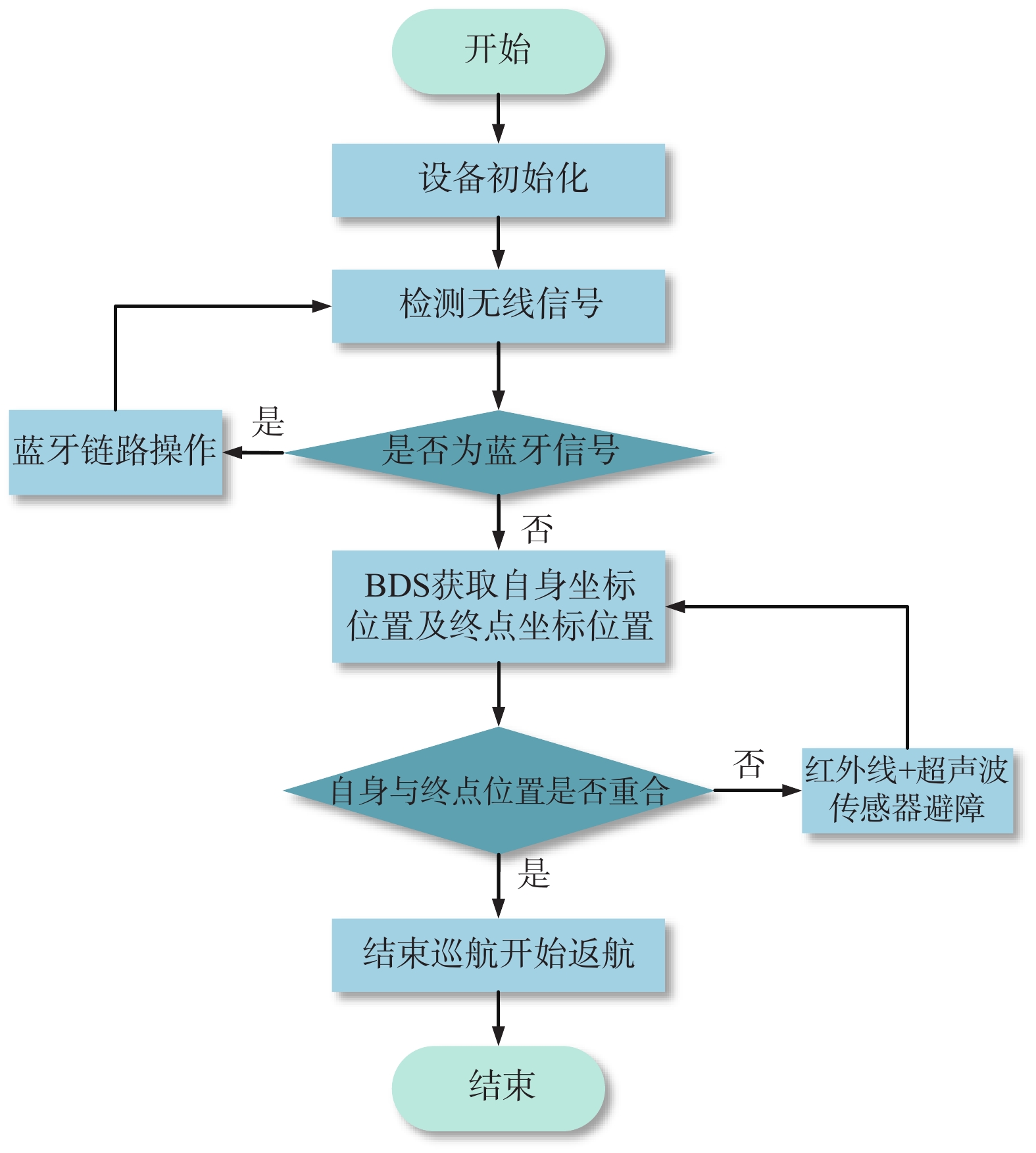
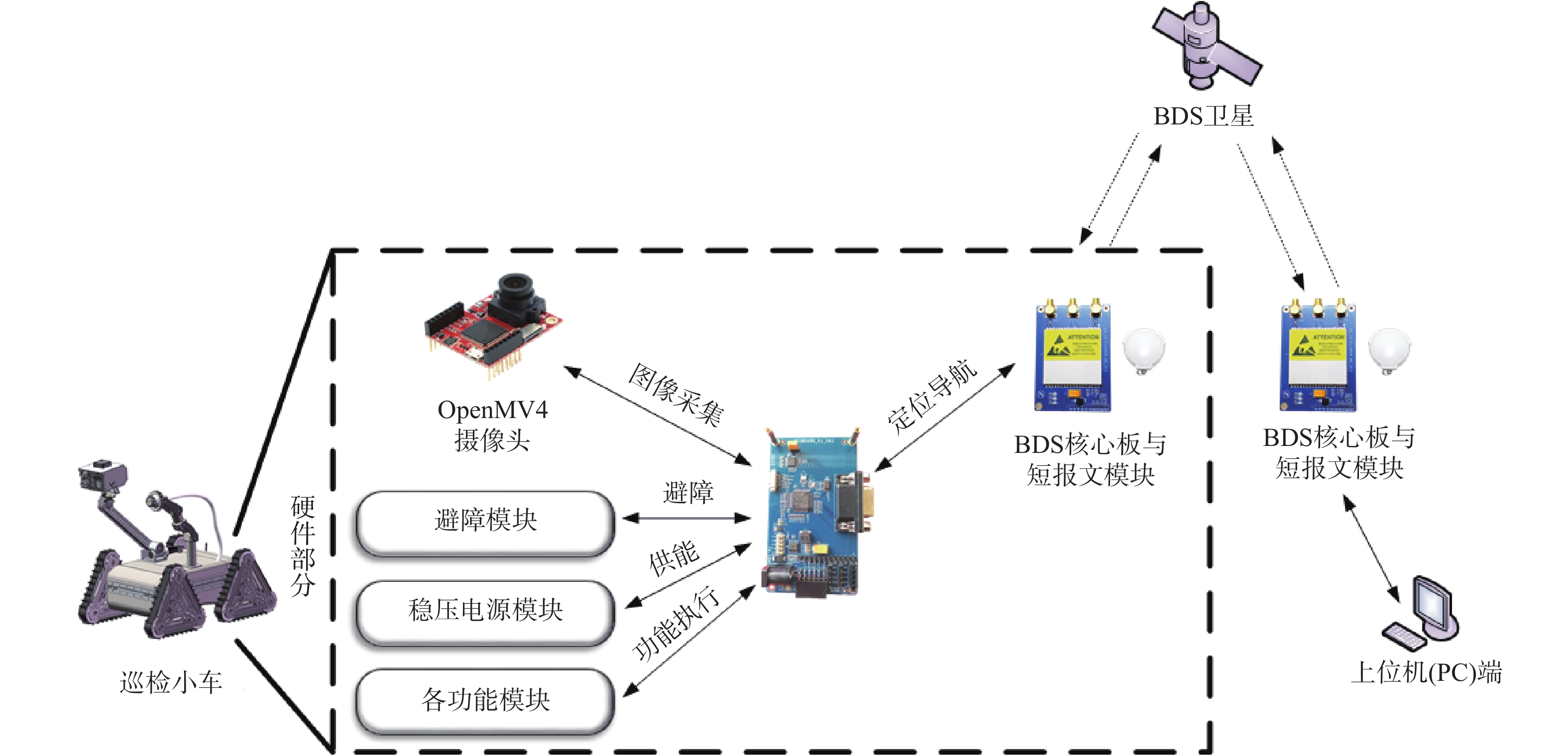
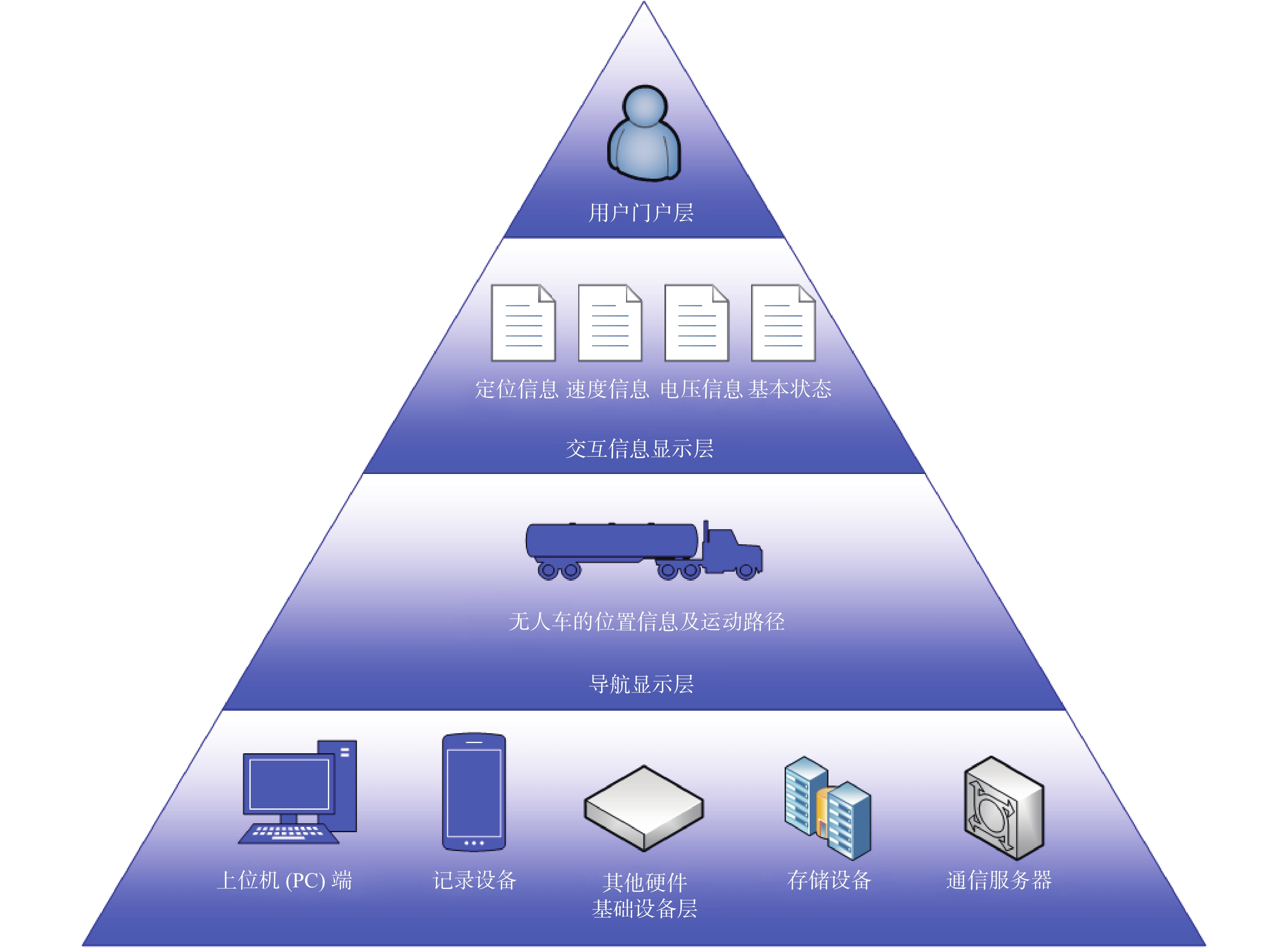
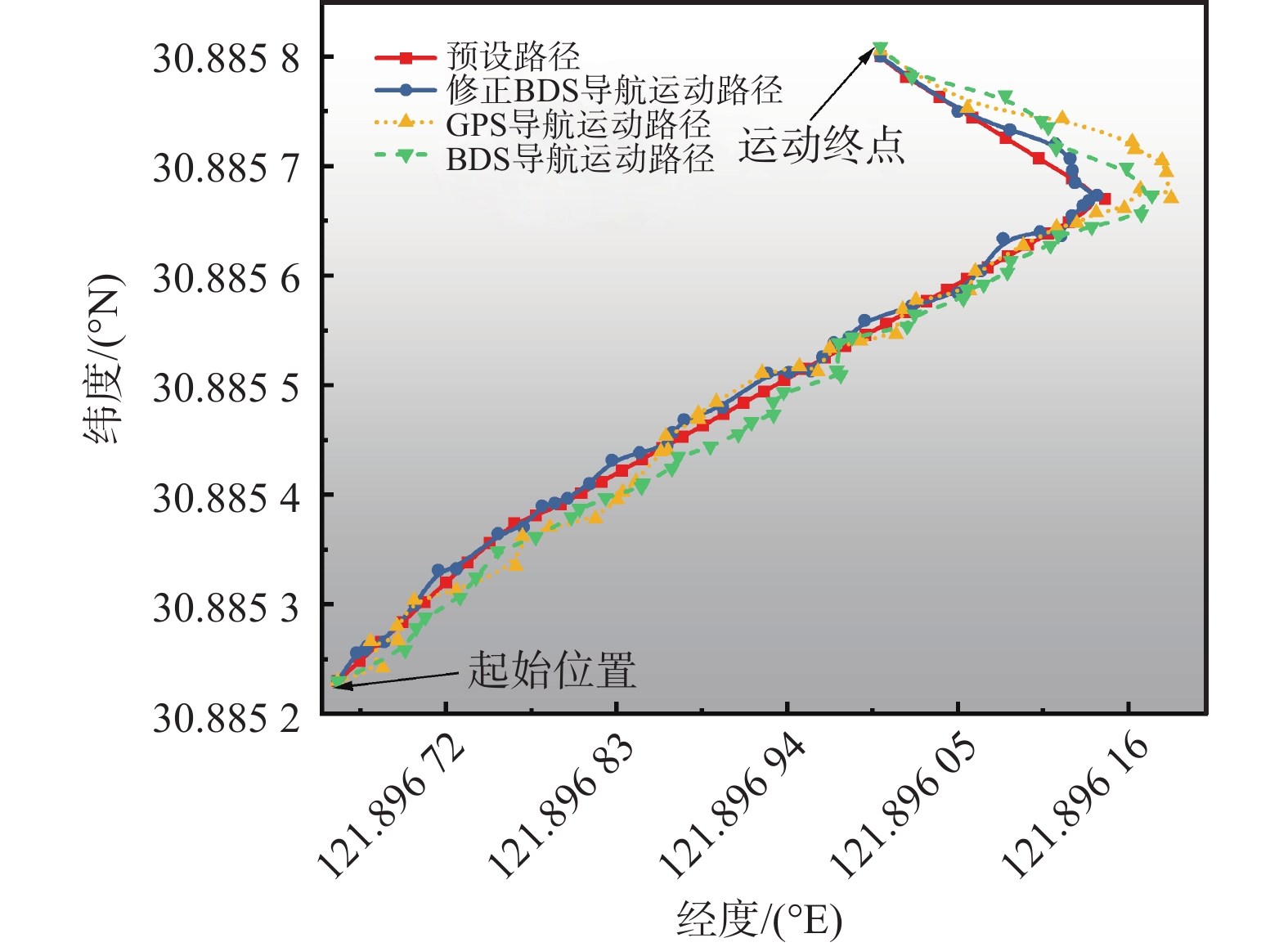
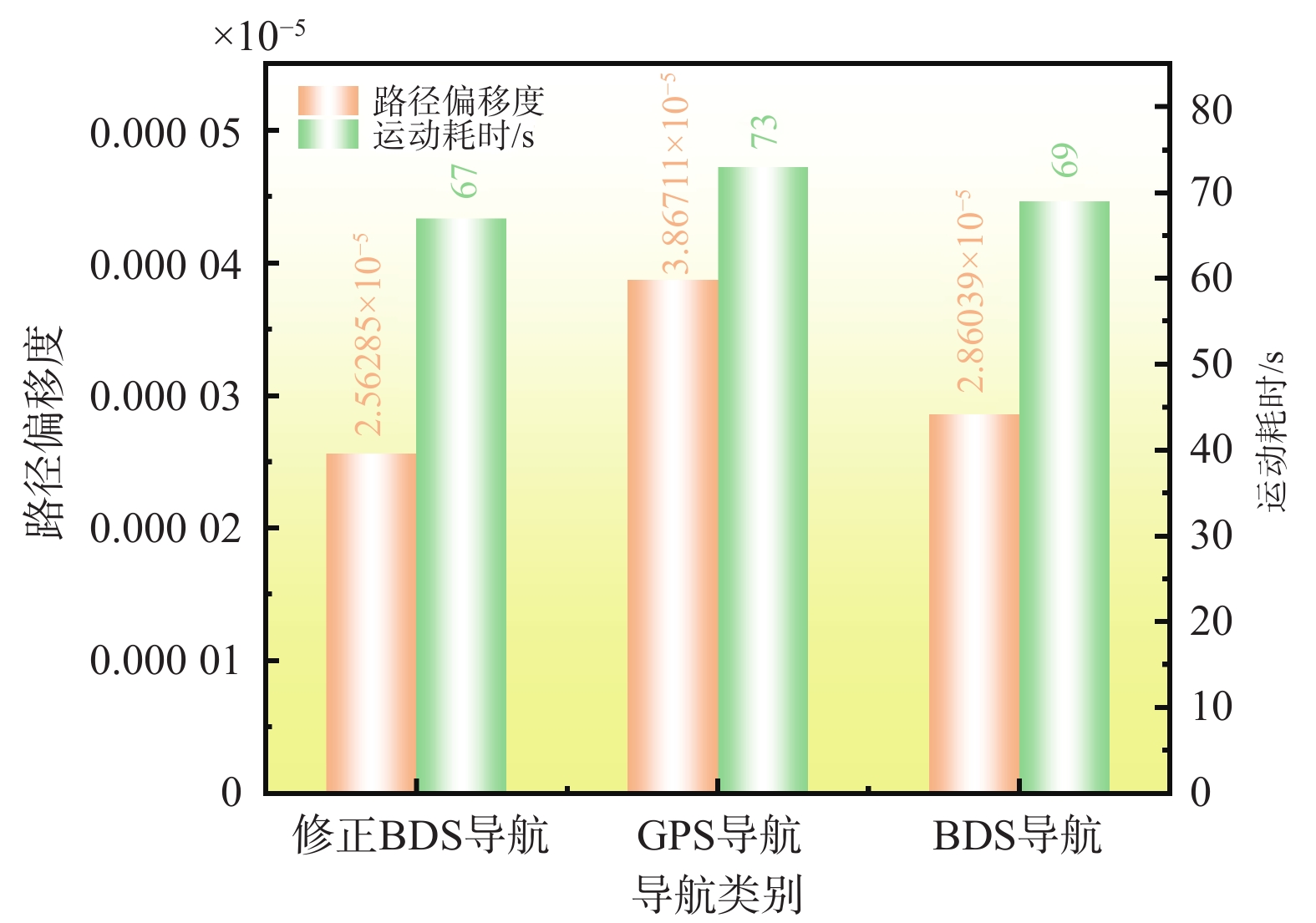
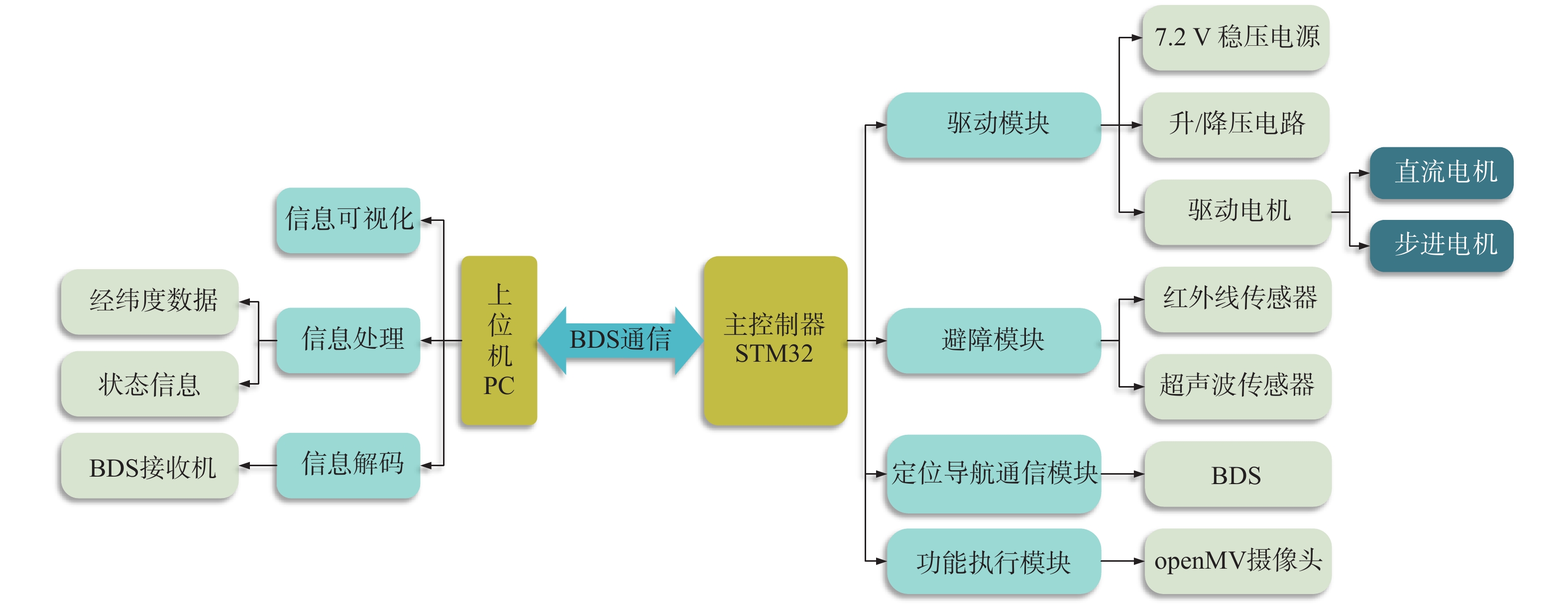
摘要: 当前智能化产品转型升级,无人车已广泛应用于生产生活实践中并发挥巨大作用. 北斗卫星导航系统(BDS)作为国产化的先进定位导航系统,在国产化智能产品的转型升级过程中将发挥越来越重要的作用. 智能化的巡检小车需具备自动导航定位和环境感知功能,而定位导航模块与通信模块扮演着重要角色. 本文设计一种适用于陆地各地形场景的智能巡检无人车,采用BDS进行定位,基于多传感器信息融合感知外部环境,能够实现自动巡航和避障相关功能,应用了BDS模块独特的短报文系统构建上位机平台进行信息交互传输,达到了良好的人机交互效果. 通过试验证明了系统的可靠性,能够进行无人车的自动巡航且巡检路径基本与预期路径保持一致. 以BDS模块为核心的无人巡检小车搭载各种功能模块后,可打造出系列相关产品用于社会生产实践中,为后续的相关技术的拓展提供新思路.
-
关键词:
- 北斗卫星导航系统(BDS)定位 /
- 巡检无人车 /
- 定位导航 /
- 通信 /
- 传感器
Abstract: The current transformation and upgrading of intelligent products, unmanned vehicles have been widely used in production and life practice and play a huge role. BeiDou Navigation Satellite System (BDS), as an independent localized advanced positioning and navigation system, will play an increasingly important role in the transformation and upgrading process of localized intelligent products. The intelligent inspection trolley needs to have autonomous navigation and positioning and environment awareness functions, and the positioning and navigation module and communication module play an important role. This paper designs a kind of intelligent inspection unmanned vehicle which is suitable for terrain scenes on land, adopts BDS satellite positioning system for positioning, senses the external environment based on multi-sensor information fusion, can realize the functions related to autonomous navigation and automatic obstacle avoidance, applies the unique short message system of BDS module to build the upper computer platform for information interaction transmission, and achieves good human-computer interaction effect. The reliability of the system is proved through the test, and it can carry out the autonomous cruise of the unmanned vehicle and the inspection path is basically consistent with the expected path. The BDS module as the core of the unmanned inspection vehicle equipped with various functional modules can create a series of related products for social production practice, which provides new ideas for the subsequent expansion of related technologies. -
表 1 BDS卫星RDSS短报文数据传输协议
名称 占用字节/B 说明 备注 ID 15 无人车系统ID 放大100倍 定位 30 无人车当前位置信息 放大10倍 速度 10 无人车运动速度 放大10倍 电压 10 无人车剩余电量 放大10倍 系统状态 10 无人车工作状态 放大100倍  下载: 导出CSV
下载: 导出CSV
-
[1] 陈哲正, 欧阳明俊, 朱祥维, 等. 北斗三号精密单点定位精度分析研究[J]. 全球定位系统, 2021, 46(2): 37-43. DOI: 10.12265/j.gnss.2020112701 [2] 崔秀芳, 李培培, 石福孝, 等. 基于BDS的水质检测仿生鱼控制系统设计[J]. 全球定位系统, 2020, 45(5): 72-76. [3] DARGAZANY A. DRL: deep reinforcement learning for intelligent robot control — concept, literature, and future[R/OL]. (2021-04-20) [2021-12-10]. https://arxiv.org/abs/2105.13806v1 [4] PROKOPYEV I V, SOFRONOVA E A. Study on control methods based on identification of unmanned vehicle model[J]. Procedia computer science, 2021, 186: 21-29. DOI: 10.1016/j.procs.2021.04.120 [5] WANG J R. An obstacle avoidance trajectory control method for intelligent robot based on K decision tree[J]. International journal of manufacturing technology and management, 2021, 35(3): 218-233. DOI: 10.1504/IJMTM.2021.118804 [6] 王靖岳, 汪杰, 王浩天. 基于模型预测控制的无人驾驶汽车纵向速度控制研究[J]. 机械设计, 2021, 38(增刊1): 69-74. DOI: 10.13841/j.cnki.jxsj.2021.s1.016 [7] 朱家诚, 吴彬, 吴焱明, 等. 铁路接触网巡检无人车自动定位系统研究[J]. 机械设计与制造, 2018(3): 160-163. DOI: 10.3969/j.issn.1001-3997.2018.03.048 [8] 李壮, 赵奇, 徐亚卿, 等. 光伏发电站智能巡检无人车: CN209044387U [P]. 2019-06-28. [9] 彭建盛, 黄小明, 何英杰, 等. 一种火灾巡检无人车系统: CN110196591A [P]. 2019-09-03. [10] 强明辉, 蒋文. 改进的自适应滤波算法在BDS/INS组合导航中的应用[J]. 全球定位系统, 2018, 43(3): 1-6. DOI: 10.13442/j.gnss.1008-9268.2018.03.001 [11] 周朋进, 吕志伟, 丛佃伟, 等. 异步联邦UKF的GNSS/SINS/摄影定位组合导航算法仿真[J]. 全球定位系统, 2018, 43(6): 25-32. DOI: 10.13442/j.gnss.1008-9268.2018.06.005 [12] GUAN W P, HUSSAIN B H, YUE P. Technology report : robotic localization and navigation system for visible light positioning and SLAM[R]. 2021. DOI: 10.48550/arXiv.2104.14755 [13] 姜少杰, 刘海敌, 王宪. 基于GPS的自动巡航监测船系统的设计与实现[J]. 全球定位系统, 2017, 42(3): 77-81. [14] 陈倩, 杜辉. 船用卫星导航接收设备国际标准分析[J]. 全球定位系统, 2018, 43(5): 129-134. DOI: 10.13442/j.gnss.1008-9268.2018.05.023 [15] 曹宇, 宋育泽, 唐小波, 等. BDS在电动船智能充电装置中的应用[J]. 全球定位系统, 2021, 46(5): 73-78. DOI: 10.12265/j.gnss.2021033101 [16] 李玉婷. 一种三角履带轮机器人: CN106346440A [P]. 2017-01-25. [17] 张文德. BDS/GPS双模定位算法研究[D]. 广州: 广东工业大学, 2019. [18] 韩冲. 复杂地貌环境下BDS高精度定位算法研究[D]. 太原: 太原理工大学, 2018. [19] 吴子岳, 李二杨, 王儒. 北斗卫星导航系统在近海无人水下航行器路径跟踪方面的应用[J]. 全球定位系统, 2021, 46(2): 98-103. DOI: 10.12265/j.gnss.2020112704 [20] 陈威, 陈静. 基于多传感器的智能小车避障控制系统设计[J]. 工业控制计算机, 2018, 31(7): 41-42. DOI: 10.3969/j.issn.1001-182X.2018.07.018 [21] 张卫波, 张麒麟, 马宁, 等. 基于模糊PID的智能车辆路径跟踪控制技术研究[J]. 机械制造与自动化, 2018, 47(2): 167-170,174. DOI: 10.19344/j.cnki.issn1671-5276.2018.02.046 -





 点击查看大图
点击查看大图
图(12) / 表(2)
计量
- 文章访问数: 653
- HTML全文浏览量: 102
- PDF下载量: 32
- 被引次数: 0
