

ARAIM protection level calculation method for BeiDou decimeter level single epoch point positioning
-
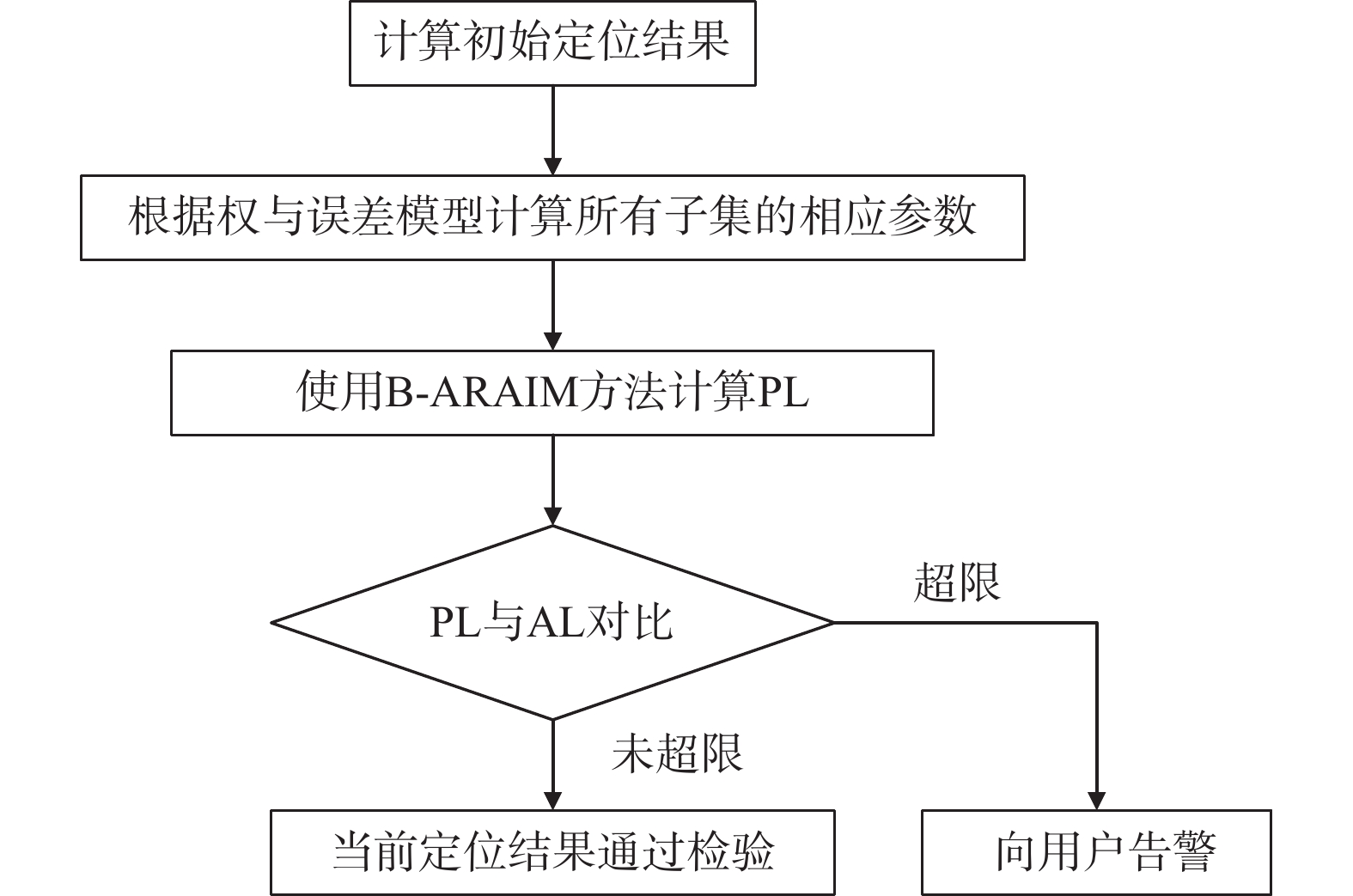
摘要: 精密定位的质量控制和完好性评估是实时全球卫星导航系统(GNSS)导航应用不可或缺的环节,尤其是在GNSS易受损害的城市峡谷等场景下,这种需求更加迫切. 广域精密单点定位(PPP)瞬时分米级定位,利用GNSS三频信号形成的两个宽巷观测值可以实现单点单历元分米级定位. 然而,在城市复杂环境中,反射信号、严重多路径以及其他信号干扰对定位造成的影响无法准确评估与识别,限制了PPP瞬时分米级单点定位的应用. 完好性概念中的高级接收机自主完好性监测(ARAIM)可以计算用户定位误差最小置信区间的上限保护水平(PL)以评估定位有效性,可经过一定改进用于PPP瞬时定位的质量控制. 针对当前ARAIM中计算PL的误差模型难以适应高精度定位需求的问题,提出了一种改进的ARAIM PL算法,称其为B-ARAIM (Back Advanced Receiver Autonomous Integrity Monitoring). 使用PPP三频组合观测值残差对ARAIM权与误差模型进行修正以计算PL. 基于不同复杂程度的环境下采集的车载数据对算法进行了验证,对PL的改进情况以及导航的可用性提升情况进行评估. 结果表明:在不同环境下,基于改进的B-ARAIM算法得到的PL,相比传统方法得到的PL更符合城市定位的需要,将PL降低了30%~70%. 此方法有助于将ARAIM算法应用在高精度GNSS定位领域.
-
关键词:
- 高级接收机自主完好性监测(ARAIM) /
- 保护水平(PL) /
- 单历元分米级 /
- 北斗 /
- 车载导航
Abstract: Precision positioning quality control and integrity assessment is an integral part of real-time Global Navigation Satellite System (GNSS) navigation applications, especially in GNSS vulnerable urban canyon scenarios. Wide-area precise point positioning (PPP) instantaneous decimeter level positioning can be realized by using the observation values of two wide lanes formed by GNSS three-frequency signal. However, in the complex urban environment, the impact of reflected signals, serious multipath and other signal interference on positioning cannot be accurately evaluated and identified, which limits the application of PPP instantaneous decimeter-level point positioning. advanced receiver autonomous integrity monitoring (ARAIM) in the concept of integrity can calculate the upper limit protection level (PL) of the minimum confidence interval of user positioning error to evaluate the positioning effectiveness, which can be used for quality control of PPP instantaneous positioning after some improvement. Aiming at the problem that the error model used to calculate the PL in ARAIM is difficult to meet the requirements of high-precision positioning, an improved ARAIM PL algorithm which is called B-ARAIM is proposed in this paper. The residual of PPP three-frequency combination observation value is used to modify the ARAIM weight and error model to calculate the PL. This paper verifies the algorithm based on on-board data collected in environments with different complexity levels, and evaluates the improvement of PL and the improvement of navigation availability. The results show that the PL obtained by the improved B-ARAIM algorithm is more in line with the needs of city positioning than that obtained by the traditional method, and the PL is reduced by 30% to 70% in different environments. This method is helpful to the application of ARAIM algorithm in GNSS positioning. -
表 1 无电离层三频模型系数
GNSS L1/B1/E1 L2/B2/E5a L6/B3/E5b GPS 17.885 −84.706 67.821 BDS 23.532 67.071 −89.604 Galileo 16.892 113.034 −128.926  下载: 导出CSV
下载: 导出CSV
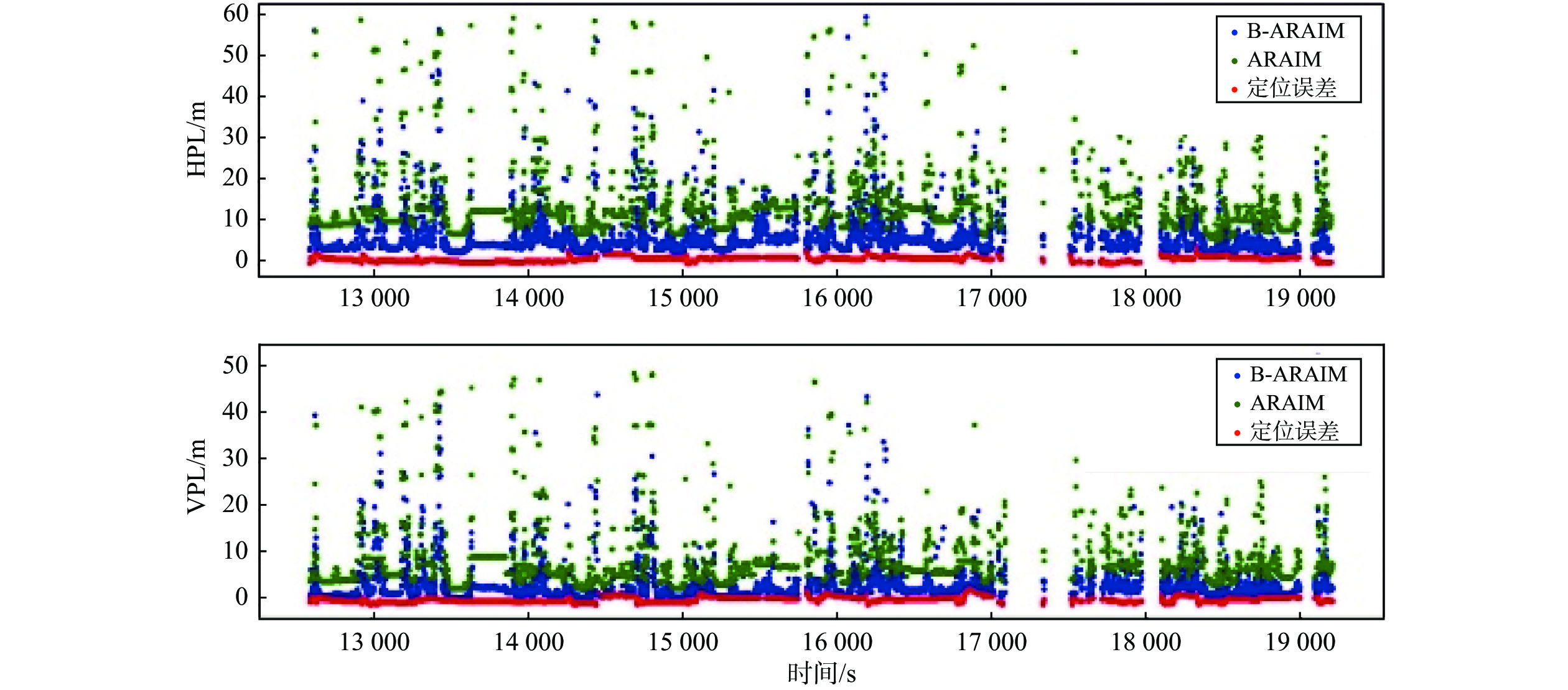
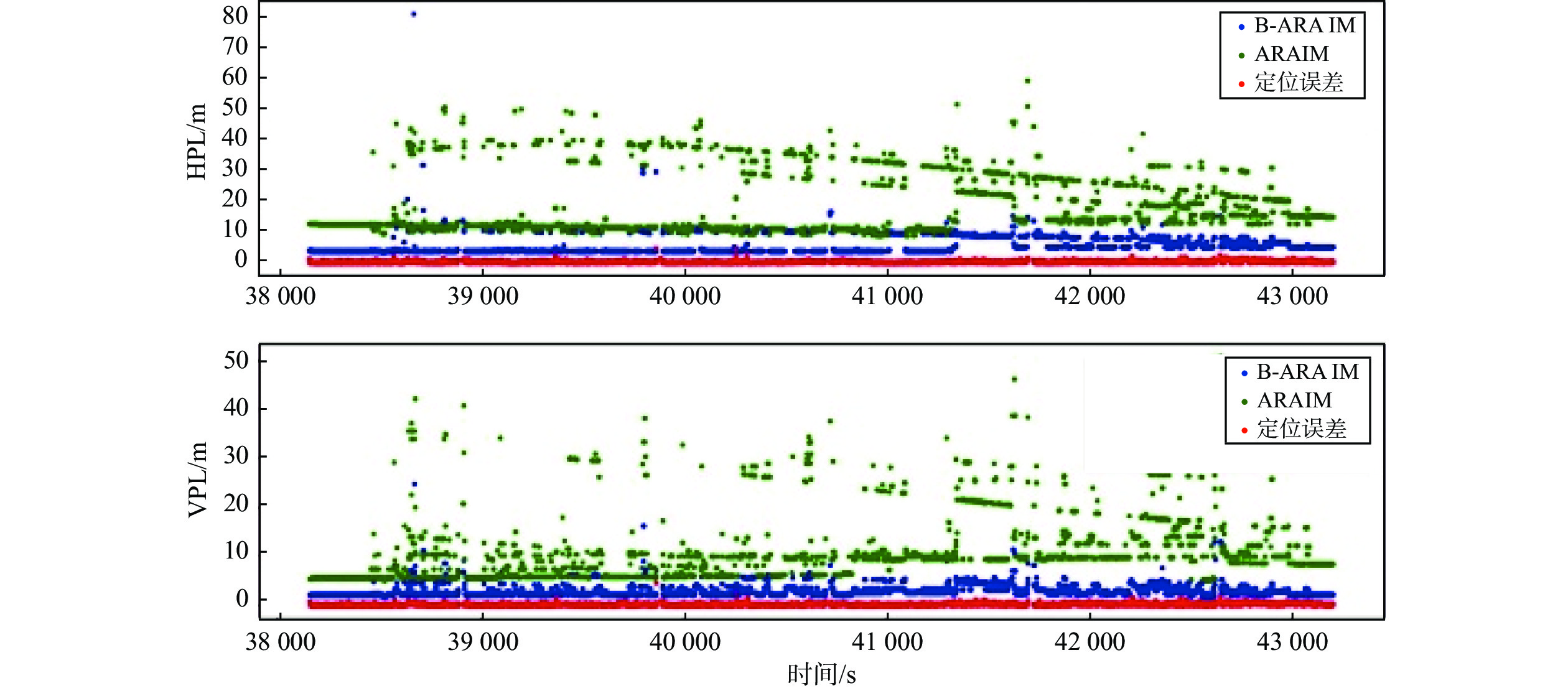
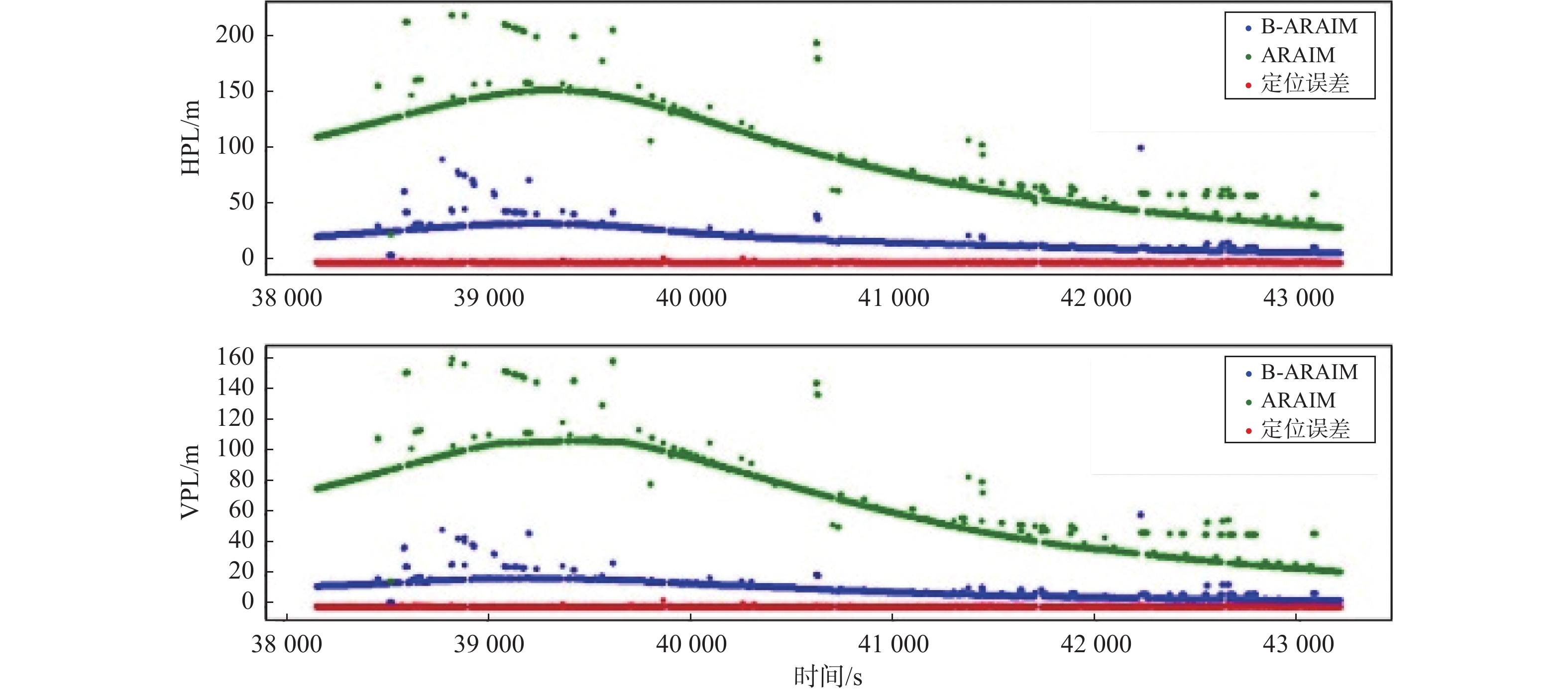
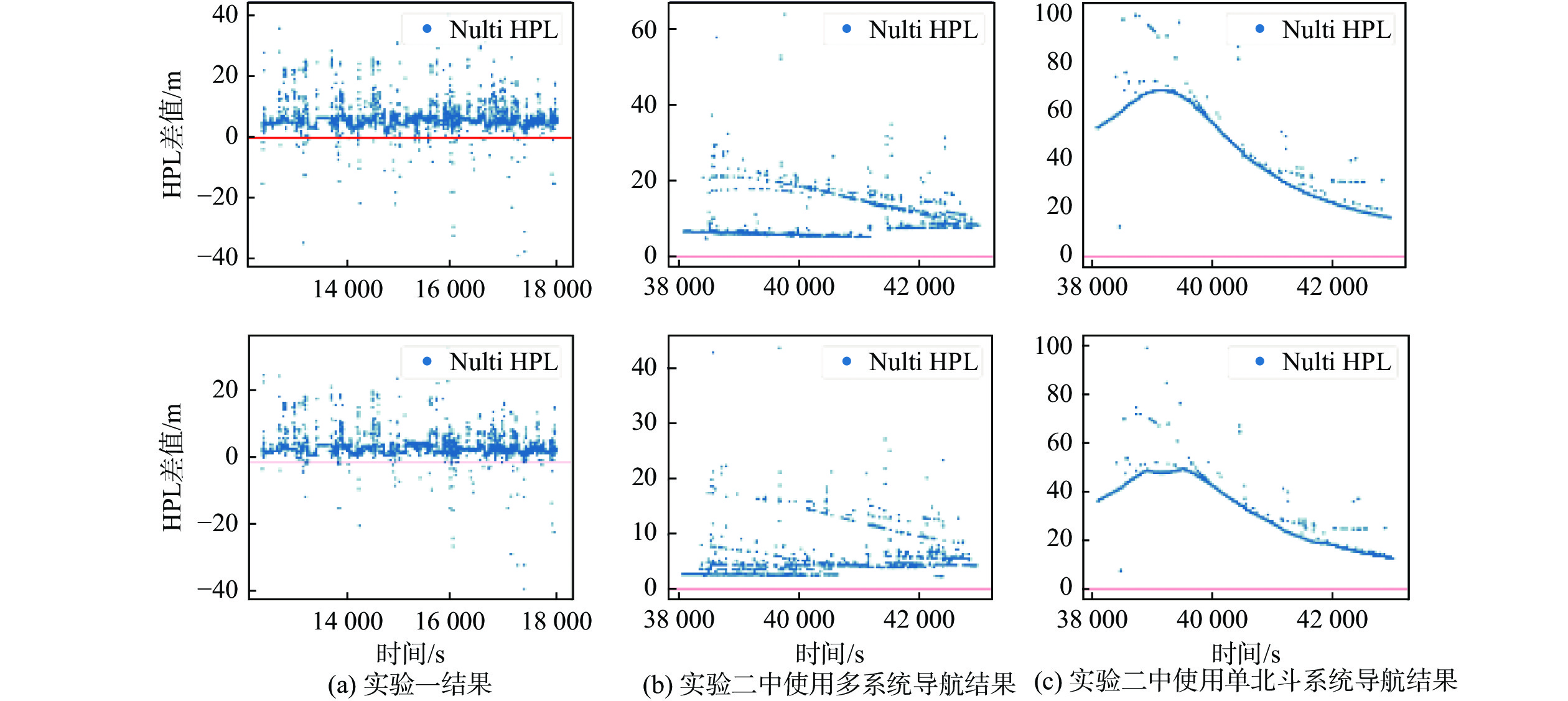
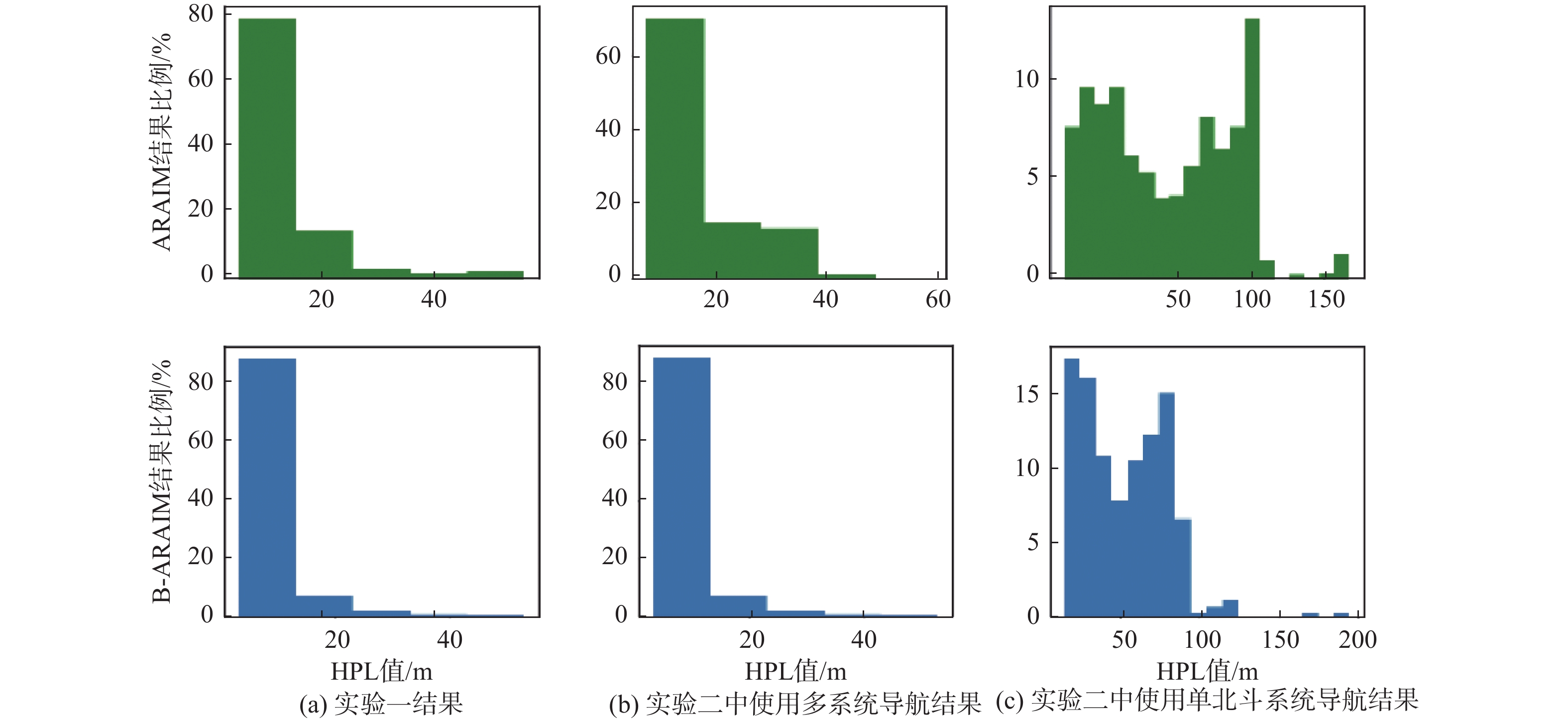
表 2 HPL情况
实验 HPL1均
值/mHPL2均
值/mHPL1<HAL
比例/%HPL2<HAL
比例/%实验一 14.64 8.25 96.53 99.08 实验二多系统 17.77 8.26 98.89 99.98 实验二单北斗系统 95.50 52.52 10.70 39.70 注: 前两行表示所有历元HPL的平均值,后两行表示满足HPL<HAL的历元占总历元的比例,以百分数表示. HPL1表示ARAIM结果,HPL2表示B-ARAIM结果.
下载: 导出CSV
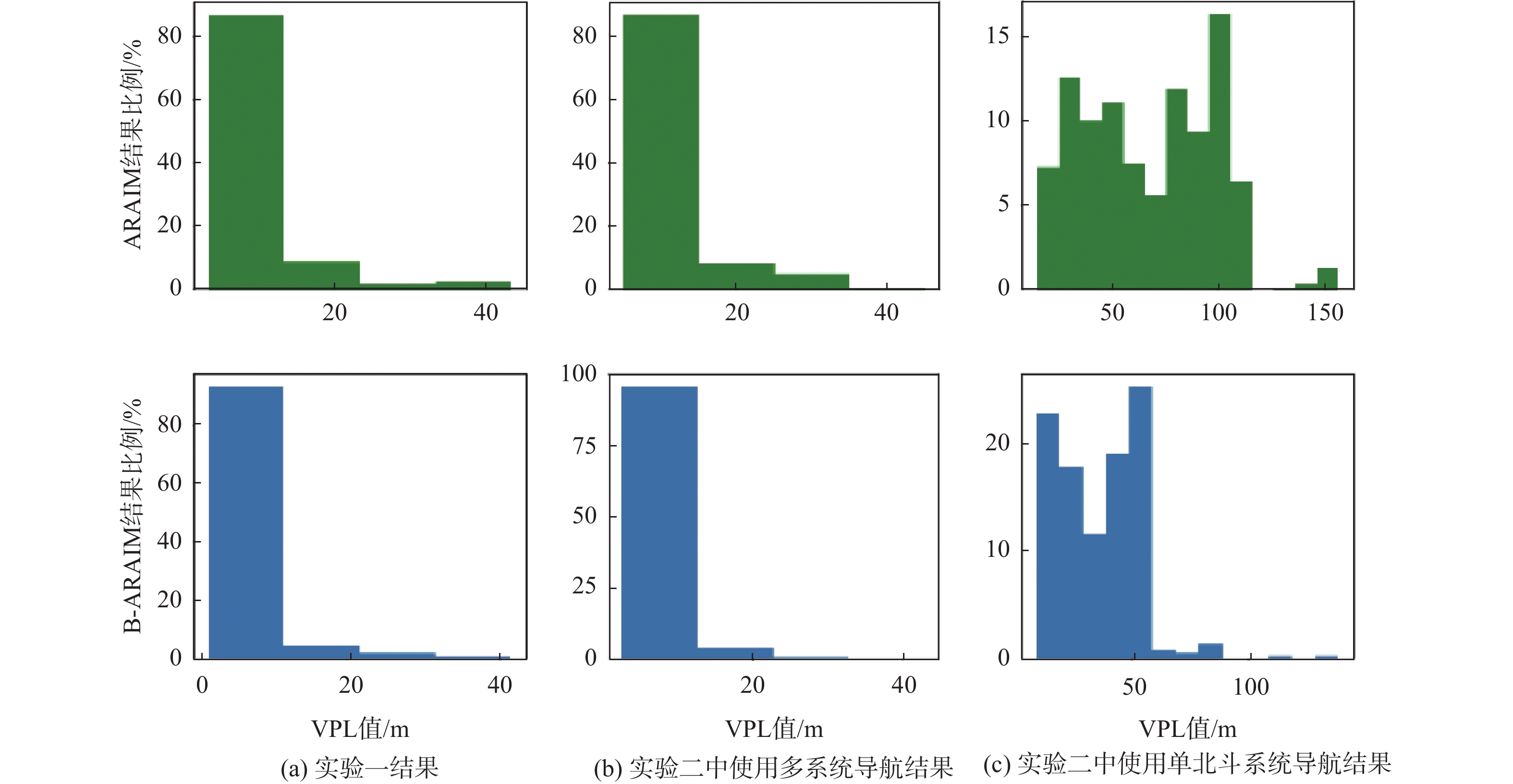
表 3 VPL情况
实验 VPL1均
值/mVPL2均
值/mVPL1<VAL
比例/%VPL2<VAL
比例/%实验一 9.46 5.21 97.36 99.48 实验二多系统 10.46 5.47 99.54 99.58 实验二单北斗系统 68.77 36.18 17.88 48.70 注: 前两行表示所有历元VPL的平均值,后两行表示满足VPL<VAL的历元占总历元的比例,以百分数表示. VPL1表示ARAIM结果,VPL2表示B-ARAIM结果.
下载: 导出CSV
-
[1] GUO J, XIN S. Toward single-epoch 10-centimeter precise point positioning using Galileo E1/E5a and E6 signals[C]//The 32nd International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2019), 2019: 2870-2887. [2] KALAFUS R M. Receiver autonomous integrity monitoring of GPS[J/OL]. [2022-02-01]. Project Memorandum DOTTSC-FAA-FA-736-1, US DOT Transportation System Center, Cambridge, MA, 1987.https://scholar.google.com/scholar?hl=zh-CN&as_sdt=0%2C5&q=Receiver+autonomous+integrity+monitoring+of+GPS&btnG= [3] PANLA F G. Phase II of the GNSS evolutionary architecture study[R/OL]. [2022-02-01]. GNSS Evolutionary Architecture Study Panel, 2010. http://www.faa.gov/about/office_org/headquarters_offices/ato?/service_units/techops/navservices/gnss/library/documents/media/GEASPhaseII_Final.pdf [4] BLANCH J, WALLKER T, ENGE P, et al. Baseline advanced RAIM user algorithm and possible improvements[J]. IEEE transactions on aerospace and electronic systems, 2015, 51(1): 713-732. DOI: 10.1109/TAES.2014.130739 [5] 张倩倩. 新型 RAIM 算法的研究及其应用[D]. 郑州: 解放军信息工程大学, 2015. [6] 苏先礼. GNSS完好性监测体系及辅助性能增强技术研究[D]. 上海: 上海交通大学, 2013. [7] 荆帅, 战兴群, 苏先礼. ARAIM算法应用于LPV-200服务[J]. 测控技术, 2012, 31(11): 75-79. DOI: 10.3969/j.issn.1000-8829.2012.11.018 [8] 王尔申, 杨迪, 宏晨, 等. ARAIM技术研究进展[J]. 电信科学, 2019, 35(8): 128-138. [9] 张发祥, 林利, 殷赞, 等. 卫星导航可用性监测技术[J]. 全球定位系统, 2018, 43(6): 19-24. [10] 徐肖豪, 杨传森, 刘瑞华. GNSS用户端自主完好性监测研究综述[J]. 航空学报, 2013, 34(3): 451-463. [11] 庄钊文, 王飞雪, 欧钢, 等. 北斗卫星导航系统安全和完好性监测现状与发展[J]. 科技导报, 2017, 35(10): 13-18. [12] 郭树人, 刘成, 高为广, 等. 卫星导航增强系统建设与发展[J]. 全球定位系统, 2019, 44(2): 1-12. [13] GENG J H, GUO J, CHANG H, et al. Toward global instantaneous decimeter-level positioning using tightly coupled multi-constellation and multi-frequency GNSS[J]. Journal of geodesy, 2019, 93(7): 977-991. DOI: 10.1007/s00190-018-1219-y [14] GENG J, LI X T, ZHAO Q L, et al. Inter-system PPP ambiguity resolution between GPS and BeiDou for rapid initialization[J]. Journal of geodesy, 2019, 93(B4): 1-6. DOI: 10.1007/s00190-018-1167-6 [15] 李彬, 吴云, 李征航. GNSS接收机自主完备性监测高级算法的有效性验证[J]. 武汉大学学报(信息科学版), 2015, 40(6): 800-804. [16] ZHAI Y. Ensuring navigation integrity and continuity using multi-constellation GNSS[D/OL]. [2022-02-01]. Chicago: Illinois Institute of Technology, 2018. https://www.proquest.com/openview/e41db1aba8b6719ed6ea744a00e846ae/1?pq-origsite=gscholar&cbl=18750 [17] PHELTS R E, GUNNING K, BLANCH J, et al. Evaluating the application of PPP techniques to ARAIM using flight data[C]// International Technical Meeting of the Institute of Navigation, 2020. DOI: 10.33012/2020.17151 [18] GUNNING K, BLANCH J, WALTER T, et al. Design and evaluation of integrity algorithms for PPP in kinematic applications[C]//The 31th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2018), 2018. DOI: 10.33012/2018.15972 [19] BLANCH J, WALTER T, ENGE P, et al. Architectures for advanced RAIM: offline and online[C]//Proceedings of the 27th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2014), 2014: 787-804. [20] BLANCH J, WALTER T, ENGE P, et al. Advanced RAIM user algorithm description: integrity support message processing, fault detection, exclusion, and protection level calculation[C]//Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2012), 2012: 2828-2849. [21] 秘金钟, 李毓麟, LI Y L. RAIM算法研究[J]. 测绘通报, 2001(3): 7-9. DOI: 10.3969/j.issn.0494-0911.2001.03.003 [22] BAHADUR B, NOHUTCU M. Comparative analysis of MGEX products for post-processing multi-GNSS PPP[J]. Measurement, 2019(145): 361-369. DOI: 10.1016/j.measurement.2019.05.094 [23] GENG J, BOCK Y. Triple-frequency GPS precise point positioning with rapid ambiguity resolution[J]. Journal of geodesy, 2013, 87(5): 449-460. DOI: 10.1007/s00190-013-0619-2 [24] 李超, 朱陵凤, 杨青, 等. 基于最小二乘残差的导航接收机自主完好性监测方法[J]. 全球定位系统, 2016(1): 69-72. DOI: 10.13442/j.gnss.1008-9268.2016.01.013 -



 点击查看大图
点击查看大图
图(10) / 表(3)
计量
- 文章访问数: 573
- HTML全文浏览量: 104
- PDF下载量: 54
- 被引次数: 0
