

BDS/GPS/LEO precise point positioning based on fourier series fitting LEO orbit error
-
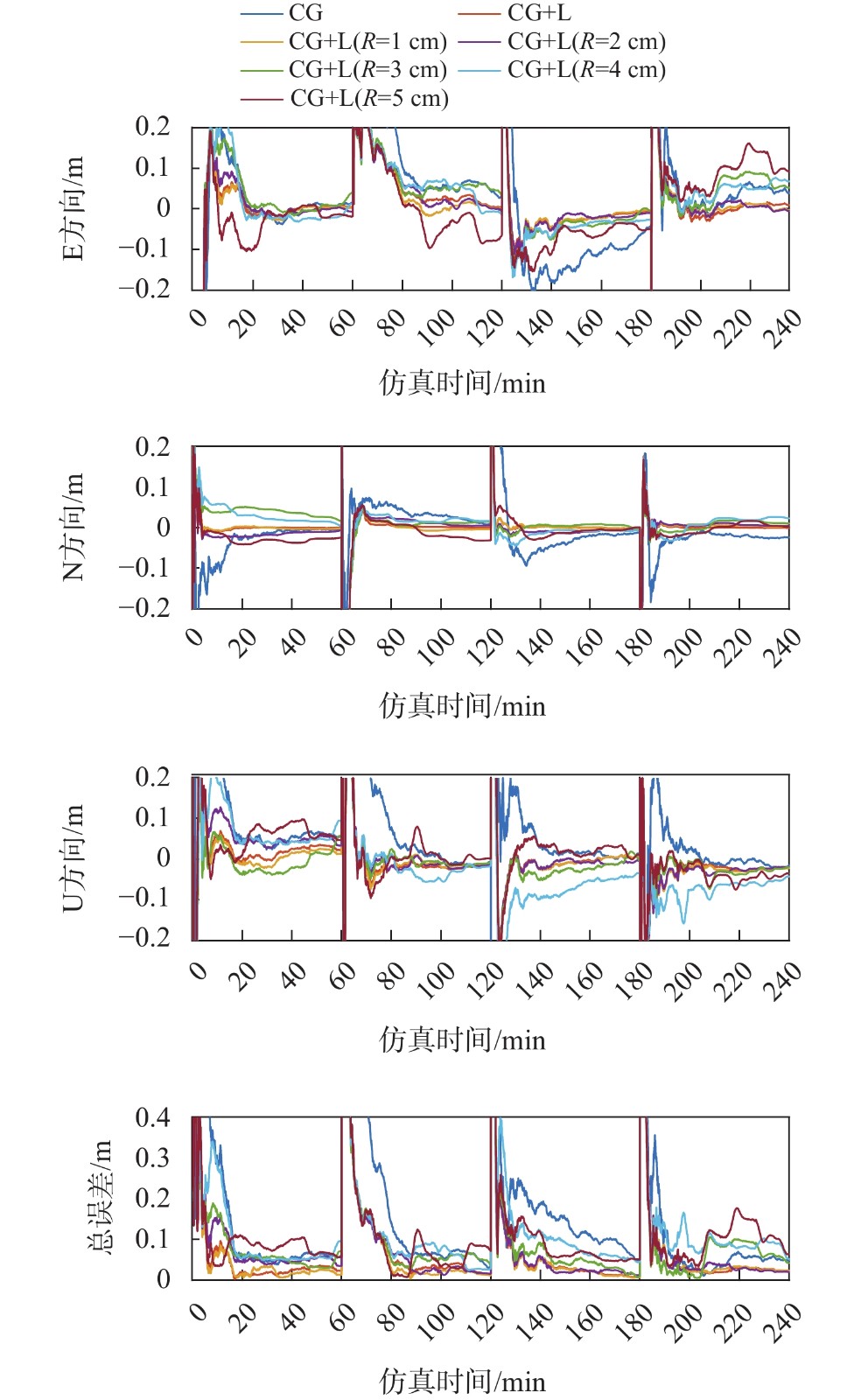
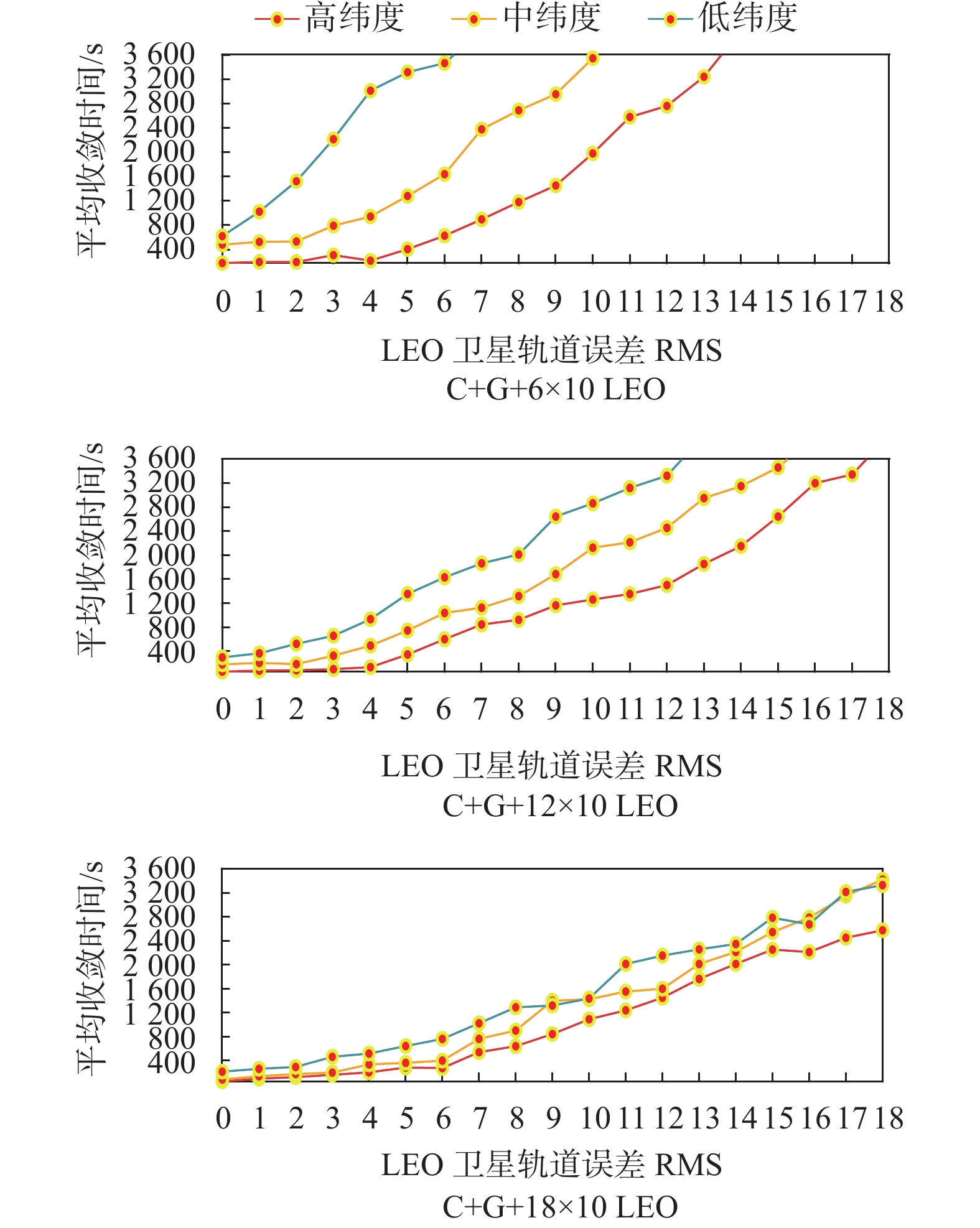
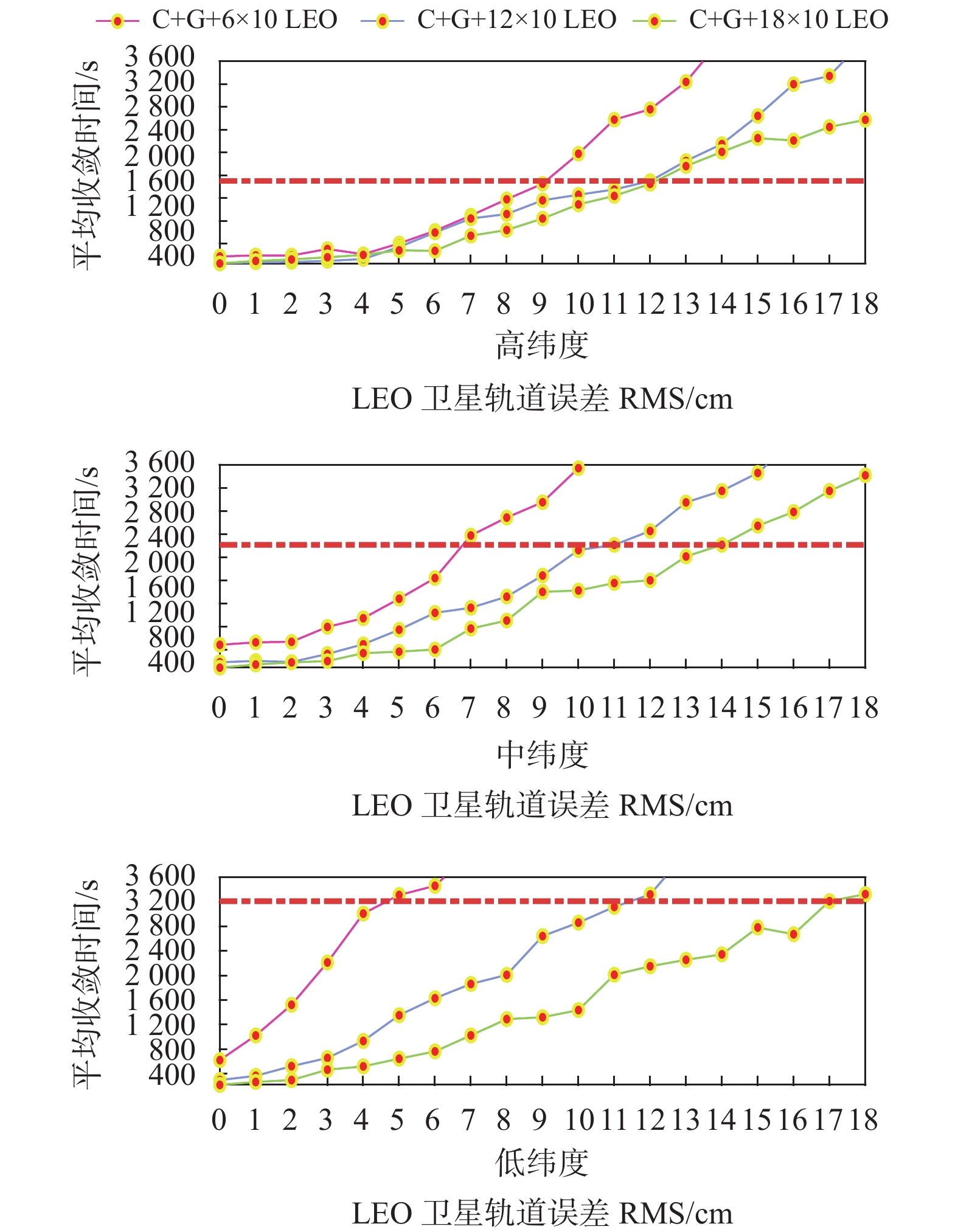
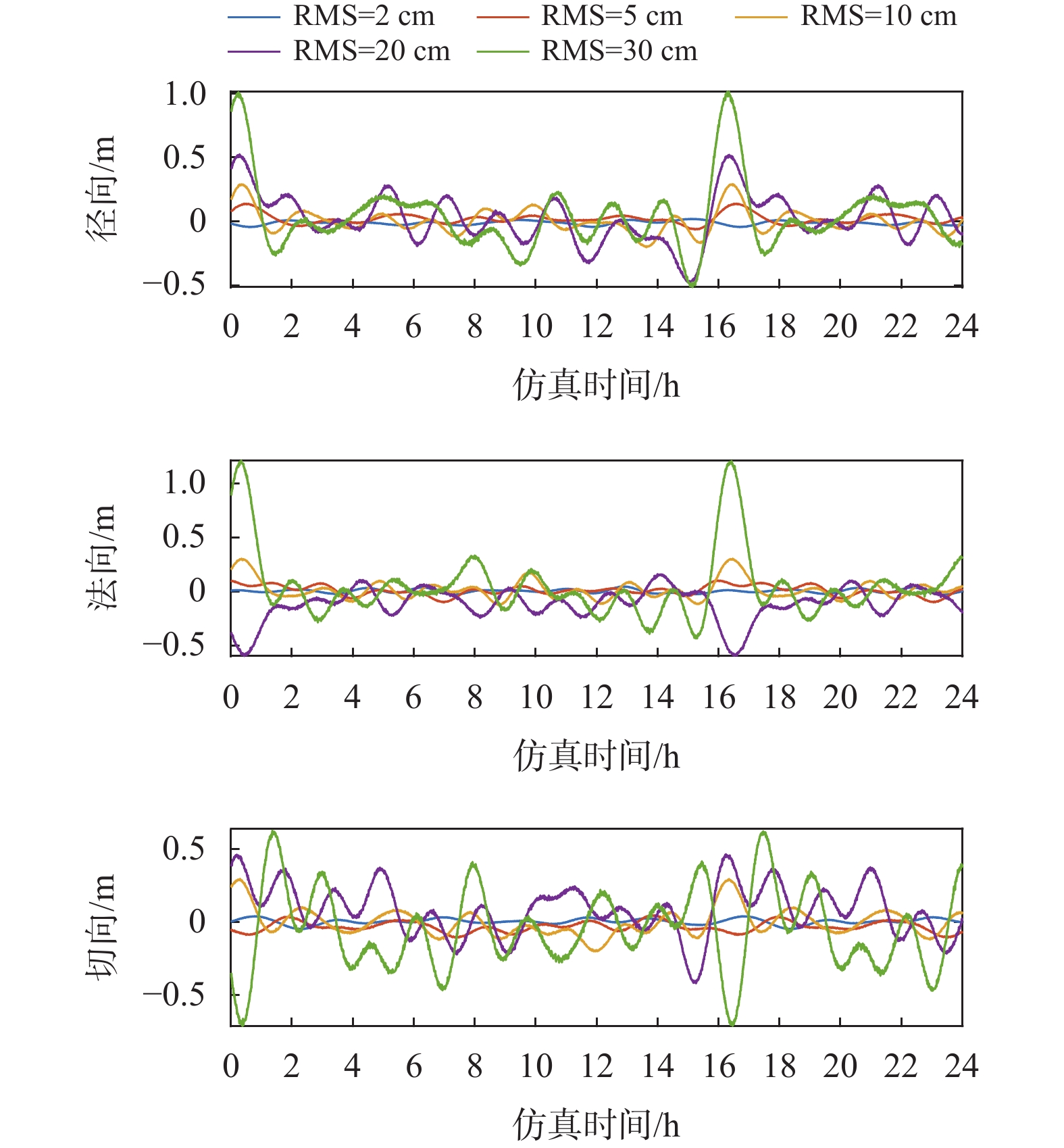
摘要: 针对目前多数低轨道地球卫星(LEO)设计处于初步论证阶段,LEO轨道无法精确获取,轨道误差难以准确表述的问题,提出了一种傅里叶级数拟合LEO轨道误差下的BDS/GPS/LEO 精密单点定位(PPP)分析方法. 该方法根据LEO精密定轨后的轨道误差呈现准周期正弦特性,利用傅里叶级数拟合LEO轨道误差,并仿真生成LEO观测数据和星历产品,分析了LEO轨道误差对BDS/GPS/LEO PPP精度与收敛时间影响. 仿真结果表明:BDS/GPS/LEO PPP定位误差随着LEO轨道误差的增加而逐渐增大,但与测站纬度和LEO星座构型无明显关联. 且为保证全球区域BDS/GPS/LEO PPP收敛时间均短于BDS/GPS PPP收敛时间,引入6×10、12×10、18×10 LEO星座后,其LEO轨道误差均方根(RMS)应小于5 cm、11 cm、12 cm.
-
关键词:
- 傅里叶级数 /
- 低轨道地球卫星(LEO) /
- 轨道误差 /
- 精密单点定位(PPP) /
- 定位精度 /
- 收敛时间
Abstract: In view of the problems that most of the low earth orbit (LEO) constellation designs are in the preliminary demonstration stage, the LEO orbit cannot be accurately obtained, and the orbit error is difficult to express accurately, BDS /GPS/LEO precise point positioning (PPP) based on Fourier series fitting LEO orbit error is proposed. Since the orbit error presents a quasi-periodic sinusoidal characteristic, the Fourier series is used to fit the LEO orbit error, and the LEO observation data and ephemeris products are generated by simulation. Finally, the influence of LEO orbit error on the accuracy and convergence time of BDS/GPS/LEO PPP is analyzed. The simulation results show that the BDS/GPS/LEO PPP error increases gradually with the increase of the LEO orbit error, but it is not significantly related to the station latitude and the LEO constellation configuration. And in order to ensure the convergence time of BDS/GPS/LEO PPP in the global area shorter than that of BDS/GPS PPP, the root mean square (RMS) of the LEO orbit error should be less than 5 cm, 11 cm, 12 cm in the 6×10,12×10,18×10 LEO constellation configuration respectively. -
表 1 BDS/GPS/LEO PPP处理策略
项目 类别 相关描述 仿真条件 卫星系统 C+G+L 信号频率 G∶L1,L2;C∶B1,B2;L∶B1,B2 观测数据来源 仿真伪距与载波相位数据 仿真时长/天 1 PPP处理设定 PPP处理时间间隔/s 设定 截止高度角/(°) 10 参数估计方法 扩展卡尔曼滤波 位置估计模式 静态估计 模糊度解算方式 浮点解解算 观测值权重比 ${\rm{G}}:{\rm{C}}:{\rm{L}} = 1:\displaystyle\frac{1}{2}:1$ 观测值测量精度 卫星高度角的随机模型 伪距与载波相位测量精度比 $100:1$ PPP误差改正 卫星轨道 仿真星历产品 卫星钟差 仿真精密钟差产品 卫星天线PCO与PCV IGS I08.ATX产品 天线相位缠绕 相位缠绕改正模型 电离层延迟 无电离层组合模型 对流层延迟 干分量:Hopfiled模型;
湿分量:随机游走估计相对论效应 公式计算 接收机钟差 白噪声估计 地球自转 公式计算 地球固体潮 Planet行星列表 海洋潮汐 FES2004 BLQ文件 极潮 igr21385.ERP文件 接收机天线
PCO与PCVIGS I08.ATX产品  下载: 导出CSV
下载: 导出CSV
表 2 仿真星座构型参数
星座
系统轨道
类型卫星
数目星座
构型轨道
倾角/(º)轨道
高度/kmGPS MEO 24 6个轨道面 56 20 180 BDS-3 MEO 27 Walker 55 21 528 BDS-3 GEO 5 0 35 786 BDS-3 IGSO 3 RAAN 118ºE 55 35 786 LEO LEO 60 极轨 90 1 000 LEO LEO 120 极轨 90 1 000 LEO LEO 180 极轨 90 1 000
下载: 导出CSV
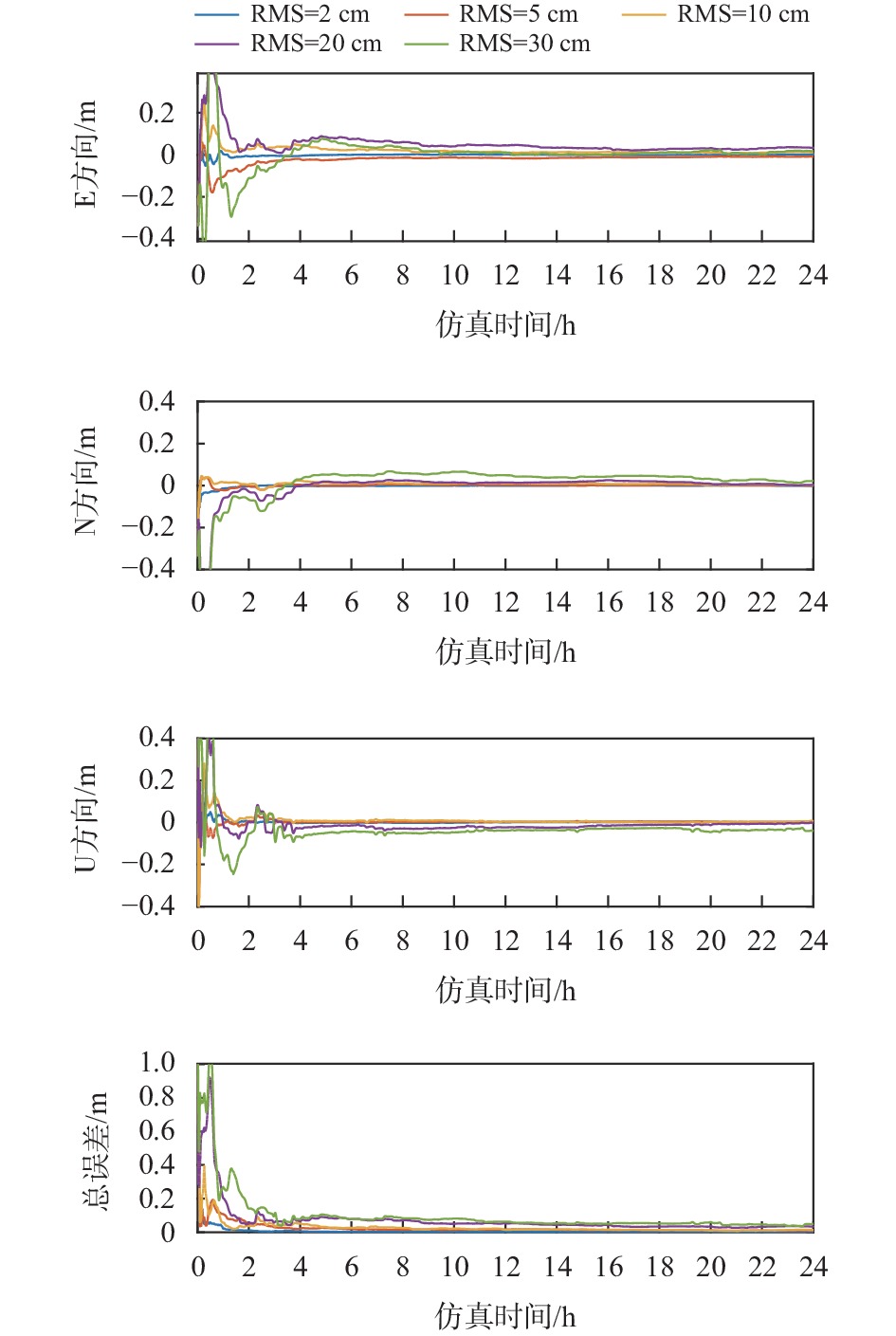
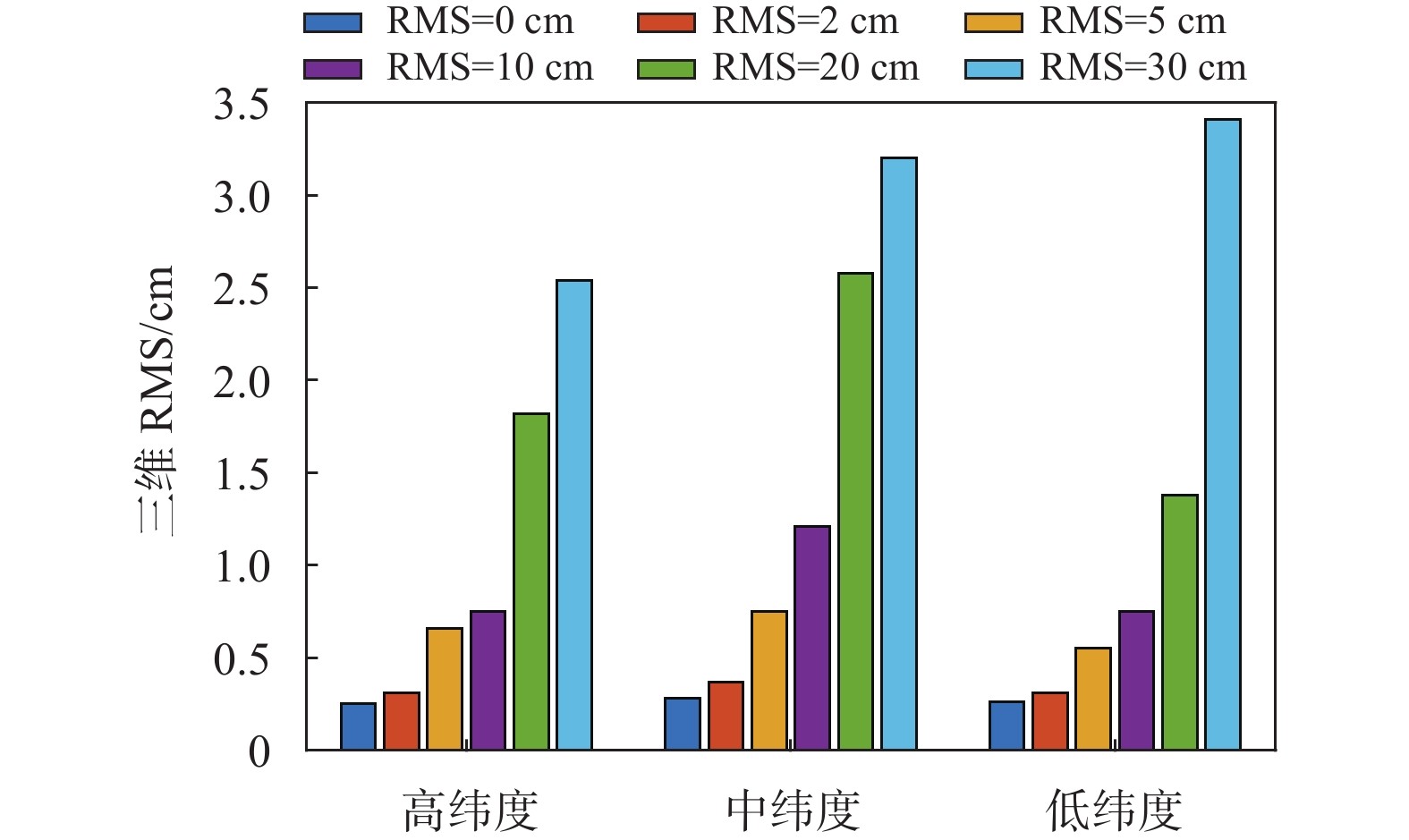
表 3 不同LEO轨道误差下高中低纬度测站PPP精度
cm 测站纬度 方向 LEO轨道误差RMS 0 2 5 10 20 30 高纬度 E 0.16 0.21 0.17 0.21 0.40 0.56 N 0.15 0.17 0.23 0.42 0.60 0.40 U 0.22 0.25 0.60 0.65 1.67 2.32 三维 0.25 0.31 0.66 0.75 1.82 2.54 中纬度 E 0.12 0.19 0.67 0.47 0.60 0.98 N 0.20 0.24 0.20 0.80 0.90 1.50 U 0.21 0.26 0.47 1.11 2.38 2.65 三维 0.28 0.37 0.75 1.21 2.58 3.20 低纬度 E 0.11 0.15 0.25 0.33 0.37 0.44 N 0.12 0.24 0.17 0.22 0.82 0.60 U 0.20 0.22 0.46 0.64 1.05 3.00 三维 0.26 0.31 0.55 0.75 1.38 3.41
下载: 导出CSV
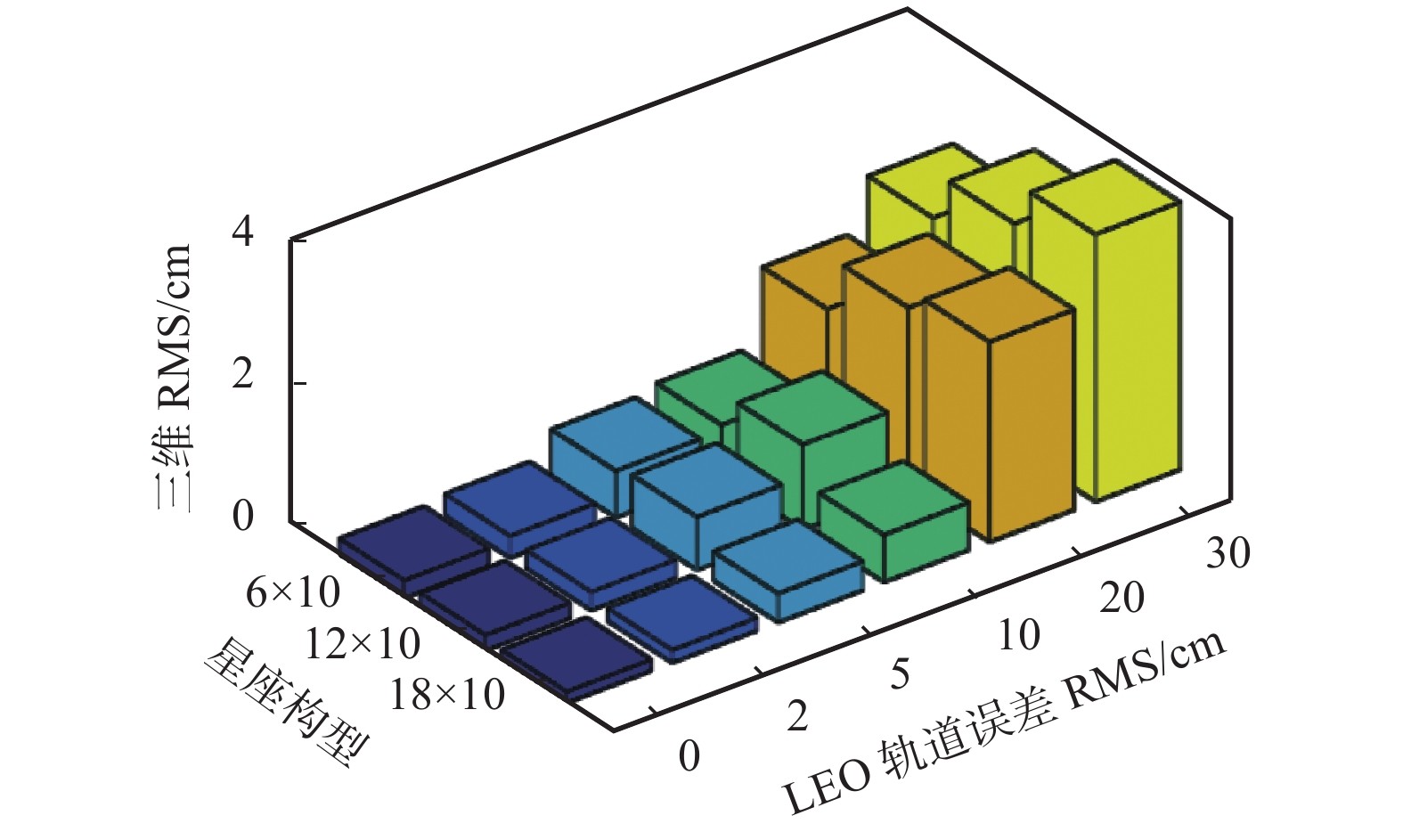
表 4 不同下高中低纬度测站PPP精度
cm 星座
构型方向 LEO轨道误差RMS 0 2 5 10 20 30 6×10 E 0.16 0.21 0.17 0.21 0.40 0.56 N 0.15 0.17 0.23 0.42 0.60 0.40 U 0.22 0.25 0.60 0.65 1.67 2.32 三维 0.25 0.31 0.66 0.75 1.82 2.54 12×10 E 0.09 0.19 0.29 0.47 0.60 0.98 N 0.12 0.14 0.14 0.10 0.80 1.50 U 0.16 0.20 0.67 1.11 2.38 2.65 三维 0.22 0.26 0.75 1.21 2.58 3.20 18×10 E 0.07 0.10 0.23 0.25 1.05 0.95 N 0.07 0.06 0.17 0.33 1.45 1.12 U 0.10 0.14 0.30 0.52 2.42 3.49 三维 0.16 0.18 0.41 0.67 2.84 3.79
下载: 导出CSV
表 5 PPP收敛时间变化率
(s·cm−1) 测站纬度 LEO星座构型 6×10 12×10 18×10 高纬度 235.46 193.23 139.94 中纬度 306.20 218.73 185.22 低纬度 473.33 252.25 172.83
下载: 导出CSV
-
[1] 布金伟. 多模GNSS精密单点定位精度分析与比较[D]. 昆明: 昆明理工大学, 2018. [2] 李星星. GNSS精密单点定位及非差模糊度快速确定方法研究[D]. 武汉: 武汉大学, 2013. [3] JIAO G Q, SONG S L, GE Y L, et al. Assessment of BeiDou-3 and multi-GNSS precise point positioning performance[J]. Sensors, 2019, 19(11): 2946-2950. DOI: 10.3390/s19112496 [4] 赵兴隆, 钟世明, 欧吉坤, 等. LEO星座增强GNSS的精密单点定位初步分析[J]. 大地测量与地球动力学, 2020, (6): 624-628. [5] 杨波. 低轨卫星增强导航技术研究[D]. 成都: 电子科技大学, 2017. [6] 马福建. 低轨星座增强GNSS精密定位关键技术研究[D]. 武汉: 武汉大学, 2018. [7] ZHAO Q, PAN S G, GAO C F, et al. BDS/GPS/LEO triple-frequency uncombined precise point positioning and its performance in harsh environments[J]. Measurement, 2020, 151(5): 107216. DOI: 10.1016/j.measurement.2019.107216 [8] LI X, LI X X, MA F J, et al. Improved PPP ambiguity resolution with the assistance of multiple LEO constellations and signals[J]. Remote sensing, 2019, 11(4): 408. DOI: 10.3390/rs11040408 [9] 柯明星, 吕晶, 朱明, 等. LEO卫星轨道误差对GPS/LEO联合PPP的影响[C]//第七届中国卫星导航学术年会, 2016: 1-5. [10] 张柯柯. 低轨卫星精密定轨及其与GNSS导航卫星联合轨道确定[D]. 武汉: 武汉大学, 2019. [11] 王文彬, 刘荣芳. 基于经验加速度的低轨卫星轨道预报新方法[J]. 空间科学学报, 2015, 35(6): 715-720. [12] 韦春博, 谷德峰, 邵凯. 基于经验加速度建模补偿的低轨卫星轨道预报精度提升方法[C]//第五届高分辨率对地观测学术年会, 2018: 1-12. [13] 王伟. 多系统组合精密单点定位算法研究[D]. 武汉: 武汉大学, 2017: 10-22. [14] 李盼. GNSS精密单点定位模糊度快速固定技术和方法研究[D]. 武汉: 武汉大学, 2016. [15] 郭海林. 精密单点定位快速收敛研究[D]. 武汉: 武汉大学, 2018. [16] XIE X, GENG T, ZHAO Q L, et al. Design and validation of broadcast ephemeris for low earth orbit satellites[J]. GPS solutions, 2018, 22(2): 54. DOI: 10.1007/s10291-018-0719-9 [17] BOEHM J, HEINKELMANN R, SCHUH H, et al. Short note: a global model of pressure and temperature for geodetic applications[J]. Journal of geodesy, 2007, 81(10): 679-683. DOI: 10.1007/s00190-007-0135-3 -

 点击查看大图
点击查看大图
图(7) / 表(6)
计量
- 文章访问数: 574
- HTML全文浏览量: 134
- PDF下载量: 54
- 被引次数: 0
