

Performance evaluation of GNSS ionospheric constraint single-frequency PPP
-
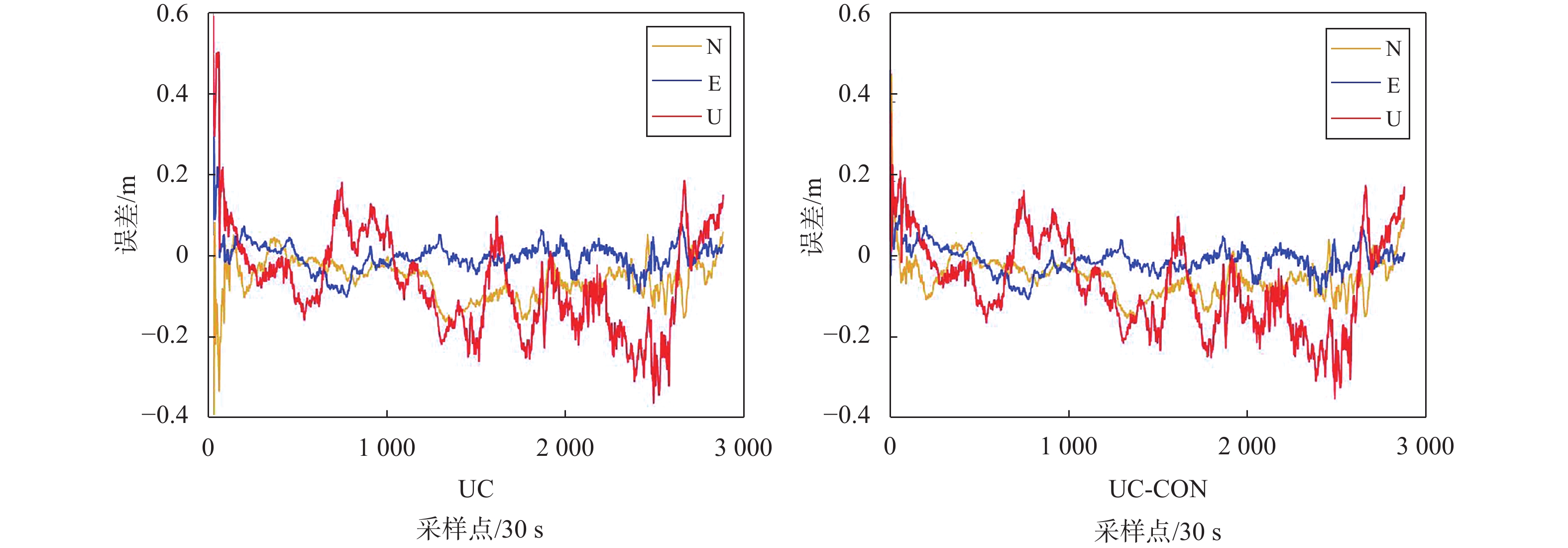
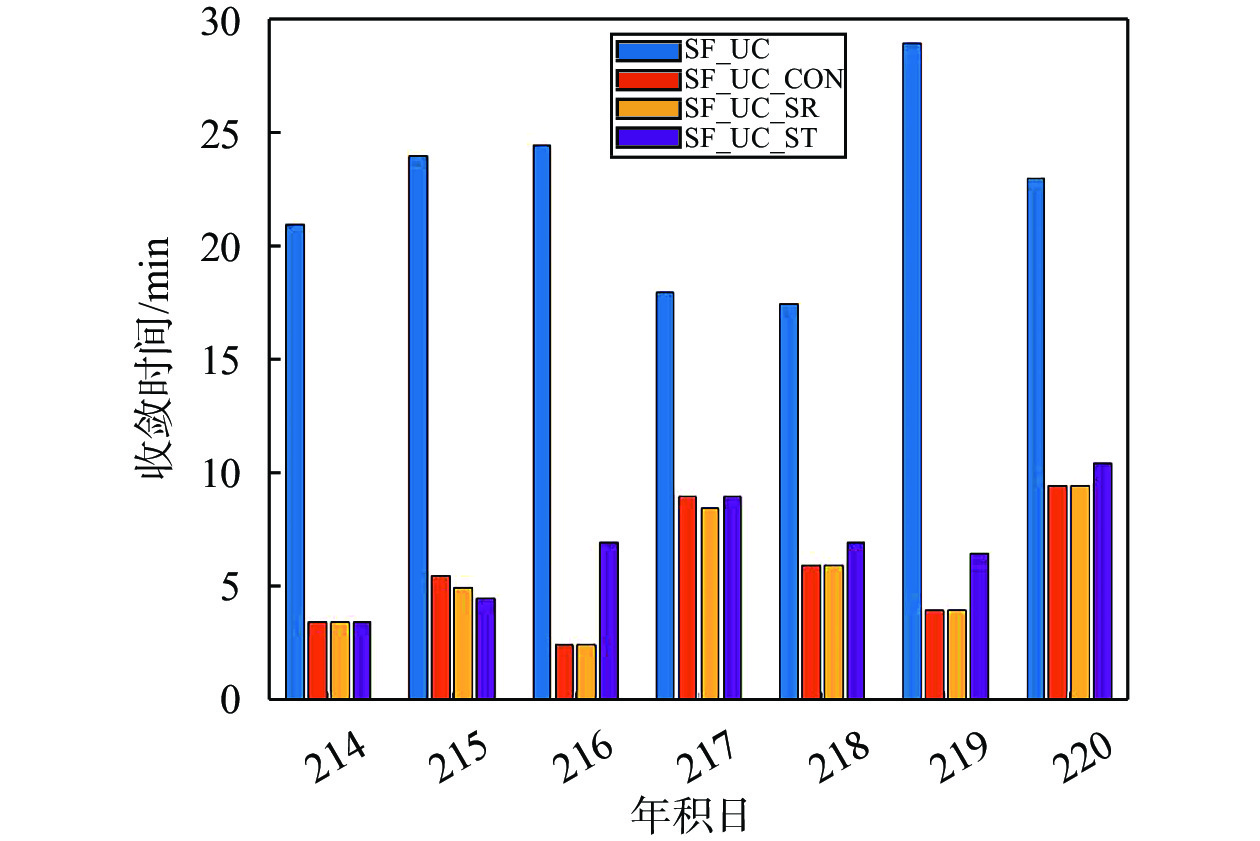
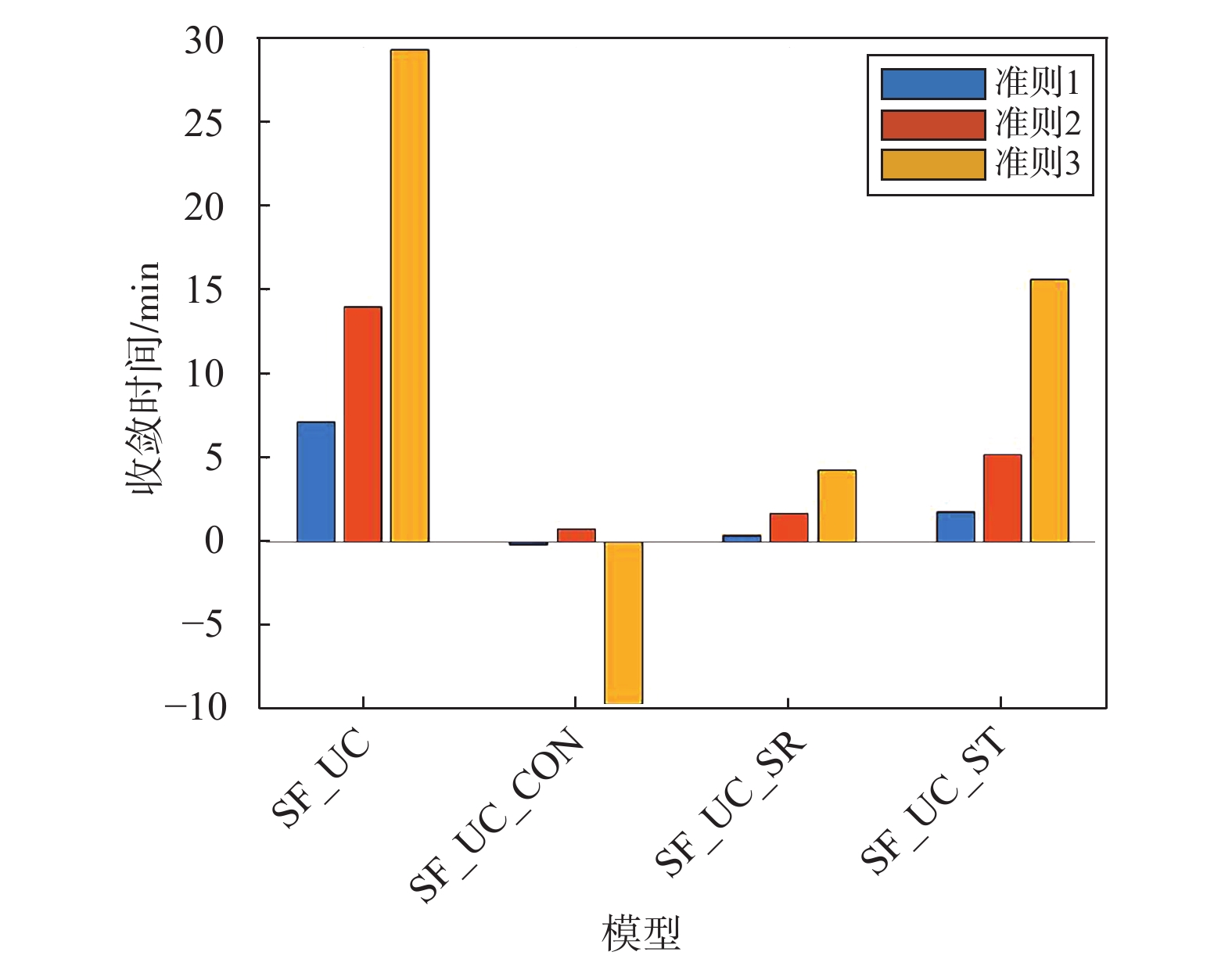
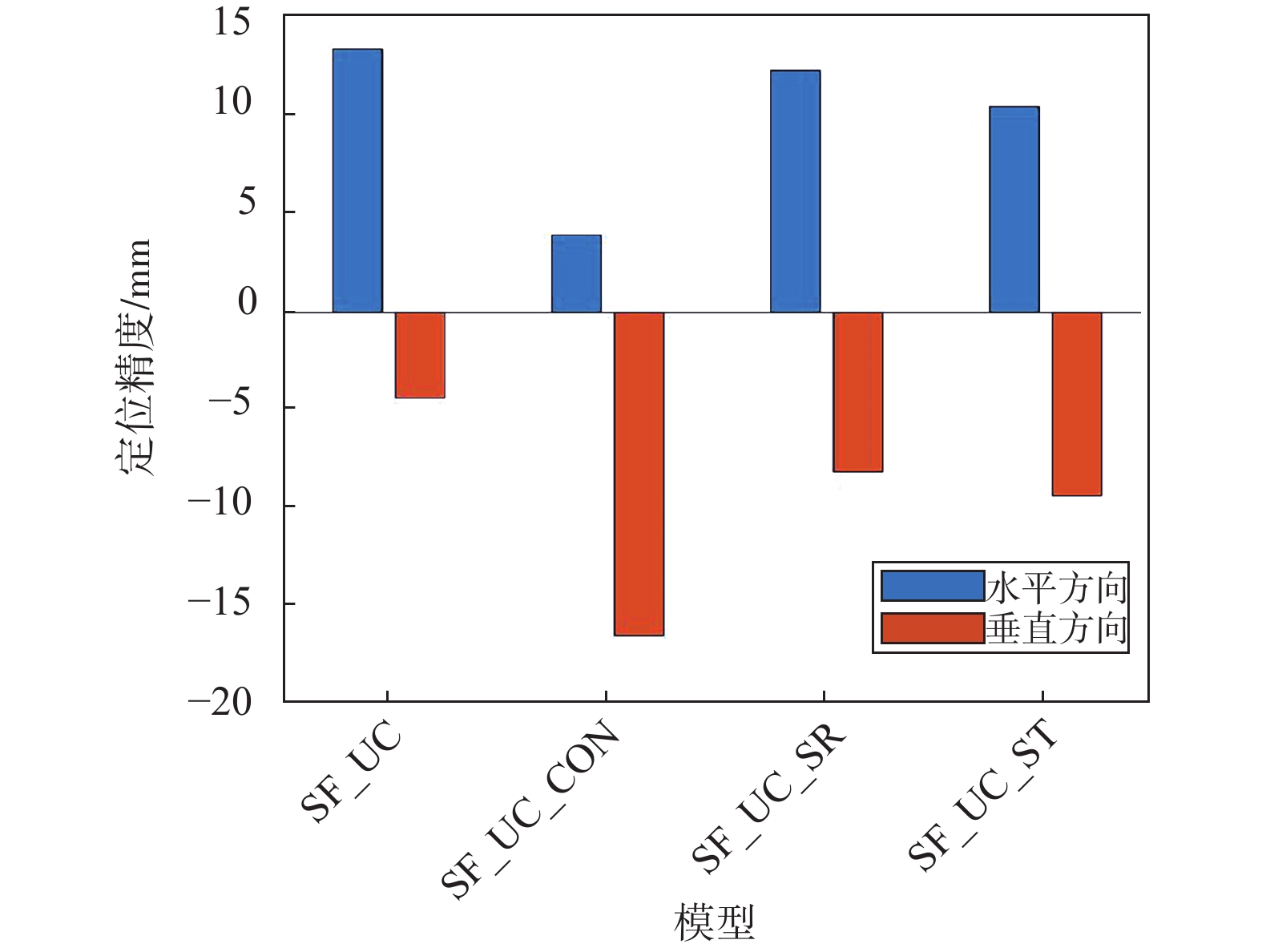
摘要: 针对单频精密单点定位(PPP)两种常用的定位模型:非组合模型和附加电离层约束模型,同时综合考虑电离层约束模型三种不同约束策略(常数约束,时空约束,逐步松弛),对比分析了其使用GPS单系统及GPS+BDS双系统观测值的定位收敛时间,定位精度及其优缺点. 实验结果表明:使用GPS单系统,附加不同电离层约束对单频PPP收敛时间缩短效果显著,其中逐步松弛约束平均收敛时间最短,其平均收敛时间为32.36 min,四种定位模型收敛后的定位精度基本相当. 加入北斗卫星导航系统(BDS)后,四种定位模型的收敛时间均有不同程度的缩短,其中时空约束模型缩短最为显著,收敛时间缩短为单系统的59.22%. 在定位精度方面,加入BDS观测值后水平方向定位精度可提升0.5~1.3 cm,垂直方向定位精度略有下降.
-
关键词:
- 单频精密单点定位(PPP) /
- 定位模型 /
- 收敛时间 /
- 定位精度 /
- 多系统
Abstract: In allusion to two commonly used models in single frequency precise point positioning (SF-PPP): SF-PPP with raw and uncombined observations(SF-UC-PPP) and SF-UC-PPP with the constraint of ionospheric delay, considering simultaneously the three different ionospheric delay constraint strategies including constant, step wise relaxed and spatial-temporal strategy, these models are compared and analyzed in positioning accuracy and convergence time using GPS and GPS+BDS data. The experiment result shows that by using the GPS system observations these three models with ionospheric delay constraint can significantly improve the convergence speed of PPP, the step wise relaxed model is the fastest. Its average convergence time is 32.36 min. Accuracy of these four models after convergence is roughly equivalent. By adding the BDS data, the convergence time of these models increases differently. The spatial-temporal model has the most significant improvement, which convergence time is shorted to 59.22% of single system. Aafter the using of BDS data, the accuracy of horizontal direction is improved by 0.5 cm to 1.3 cm, the vertical accuracy has slight decrease. -
表 2 GPS单系统四种模型平均收敛时间
min 准则 SF_UC SF_UC_CON SF_UC_SR SF_UC_ST 准则1 28.69 4.25 4.09 6.30 准则2 39.28 11.99 9.52 13.43 准则3 73.70 51.13 32.36 38.40  下载: 导出CSV
下载: 导出CSV
表 3 GPS单系统四种模型平均定位精度
cm 定位精度 SF_UC SF_UC_CON SF_UC_SR SF_UC_ST H1 9.50 8.44 9.06 8.87 V1 10.58 10.40 10.45 10.35 H2 9.26 8.29 8.96 8.73 V2 10.32 10.07 10.24 10.11 H3 8.85 7.88 8.76 8.61 V3 10.05 9.60 9.90 9.99 注:H表示水平方向定位精度,V表示垂直方向定位精度,1、2、 3分别表示按照收敛准则1、2、3统计得到的定位精度.
下载: 导出CSV
表 4 不同模型收敛时间增益
准则 系统 UC UC_CON UC_SR UC_ST G 28.70 4.26 4.10 6.30 准则1/min GC 21.52 4.38 3.71 4.55 GAIN 7.18 −0.12 0.39 1.75 提升效果/% 25.02 −2.82 9.51 27.78 G 39.28 11.99 9.52 13.43 准则2/min GC 25.28 11.22 7.84 8.20 GAIN 14.00 0.77 1.68 5.23 提升效果/% 35.64 6.42 17.65 38.94 G 73.71 51.13 32.37 38.40 准则3/min GC 44.35 60.88 28.09 22.74 GAIN 29.36 −9.75 4.28 15.66 提升效果/% 39.83 −19.07 13.22 40.78
下载: 导出CSV
表 5 定位精度增益(准则3)
方向 系统 UC UC_CON UC_SR UC_ST G 8.85 7.88 8.76 8.61 水平方向/cm GC 7.51 7.49 7.53 7.56 GAIN 1.34 0.39 1.23 1.05 提升效果/% 15.14 4.94 14.04 12.20 G 10.05 9.60 9.90 9.99 垂直方向/cm GC 10.50 11.25 10.72 10.94 GAIN −0.45 −1.65 −0.82 −0.95 提升效果/% −4.48 −17.19 −8.28 −9.51 注:G表示GPS单系统,GC表GPS+BDS双系统,GAIN表示加 入北斗观测值后的增益.
下载: 导出CSV
-
[1] ZUMBERGE J F, HEFLIN M B, JEFFERSON D C, et al. Precise point positioning for the efficient and robust analysis of GPS data from large networks[J]. Journal of geophysical research solid earth, 1997, 102(B3): 5005-5017. DOI: 10.1029/96JB03860 [2] 雷哲哲. 基于低成本u-blox单频接收机的增强PPP算法研究[D]. 西安: 长安大学, 2019. [3] 张小红, 左翔, 李盼. 非组合与组合PPP模型比较及定位性能分析[J]. 武汉大学学报(信息科学版), 2013, 38(5): 561-565. [4] 李博峰, 葛海波, 沈云中. 无电离层组合, Uofc和非组合精密单点定位观测模型比较[J]. 测绘学报, 2015, 44(7): 734-740. DOI: 10.11947/j.AGCS.2015.20140161 [5] 周锋. 多系统GNSS非差非组合精密单点定位相关理论和方法的研究[D]. 上海: 华东师范大学, 2018. [6] ZHOU F, DONG D N, LI W W, et al. GAMP: an open-source software of multi-GNSS precise point positioning using undifferenced and uncombined observations[J]. GPS solutions, 2018, 22(2): 33. DOI: 10.1007/s10291-018-0699-9 [7] GAO Z Z, MAO R G, SHEN W B, et al. Ionospheric and receiver DCB-constrained multi-GNSS single-frequency PPP integrated with MEMS inertial measurements[J]. Journal of geodesy, 2017, 91(11): 1351-1366. DOI: 10.1007/s00190-017-1029-7 [8] CAI C S, GONG Y Z, GAO Y, et al. An approach to speed up single-frequency PPP convergence with quad-constellation GNSS and GIM[J]. Sensors, 2017, 17(6): 1302. DOI: 10.3390/s17061302 [9] STEIGENBERGER P, HUGENTOBLER U, HAUSCHILD A, et al. Orbit and clock analysis of compass GEO and IGSO satellites[J]. Journal of geodesy, 2013, 87(6): 515-525. DOI: 10.1007/s00190-013-0625-4 [10] 臧楠, 李博峰, 沈云中. 3种GPS+BDS组合PPP模型比较与分析[J]. 测绘学报, 2017, 46(12): 1929-1938. DOI: 10.11947/j.AGCS.2017.20170111 [11] ODIJK D, ZHANG B C, TEUNISSEN P G. Multi-GNSS PPP and PPP-RTK: some GPS+BDS results in Australia[J]. Lecture notes in electrical engineering, 2015(341): 613-623. DOI: 10.1007/978-3-662-46635-3_52 -



 点击查看大图
点击查看大图
图(7) / 表(5)
计量
- 文章访问数: 434
- HTML全文浏览量: 533
- PDF下载量: 87
- 被引次数: 0
