

Application of laser SLAM positioning method based on reflection target in port unmanned vehicle
-
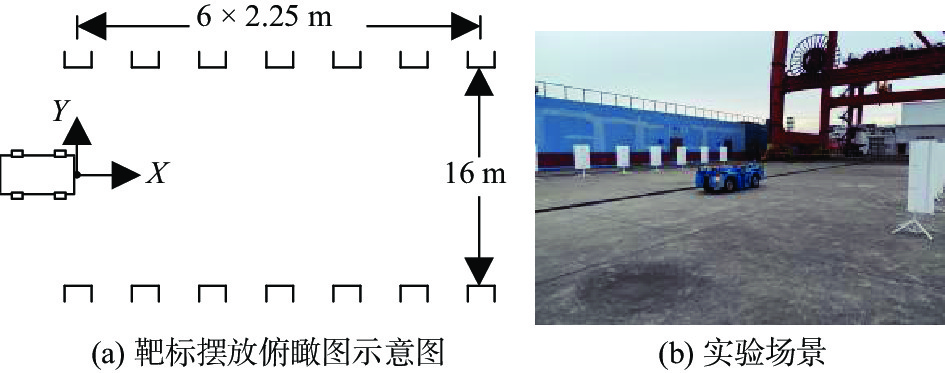
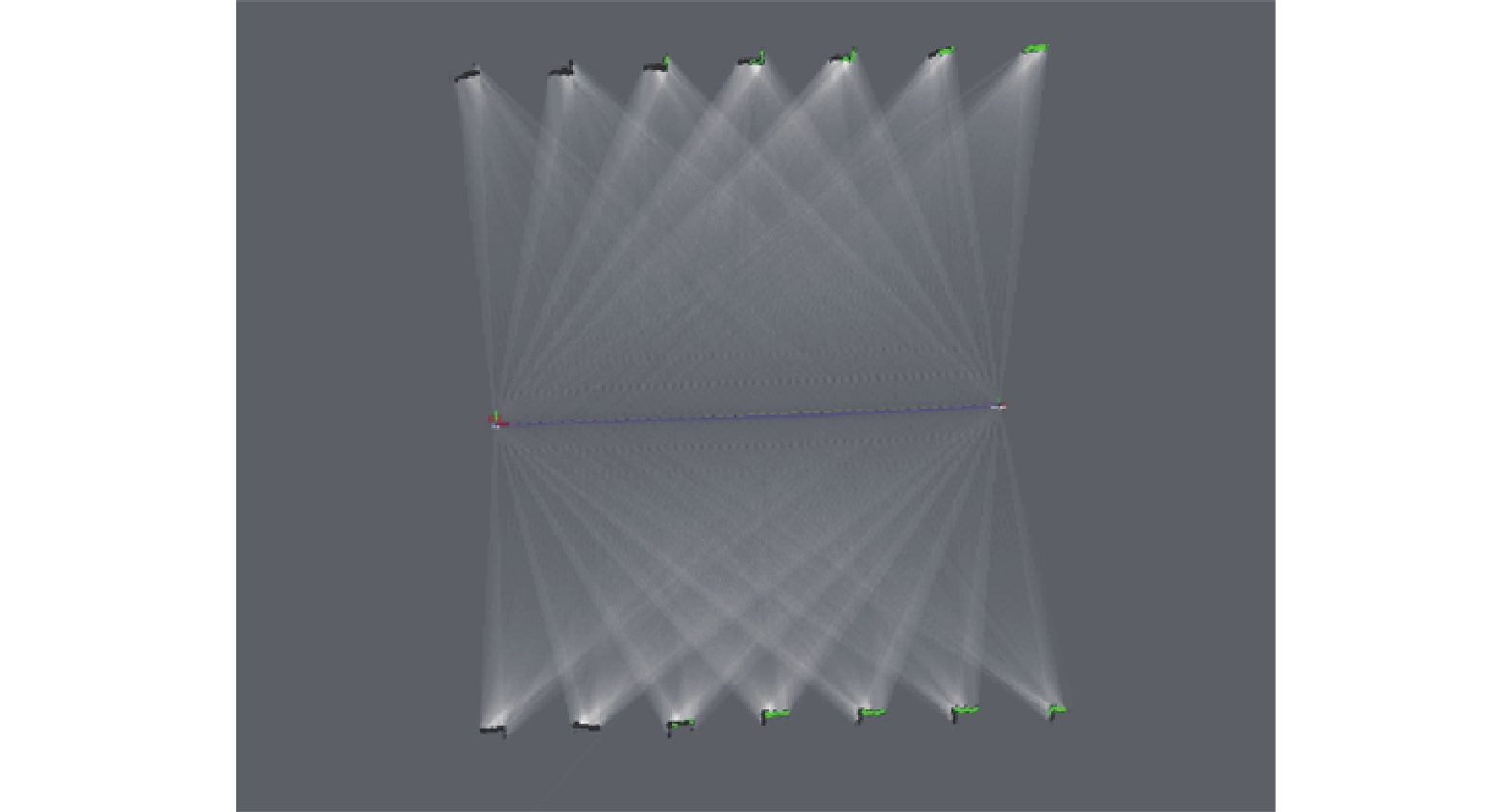
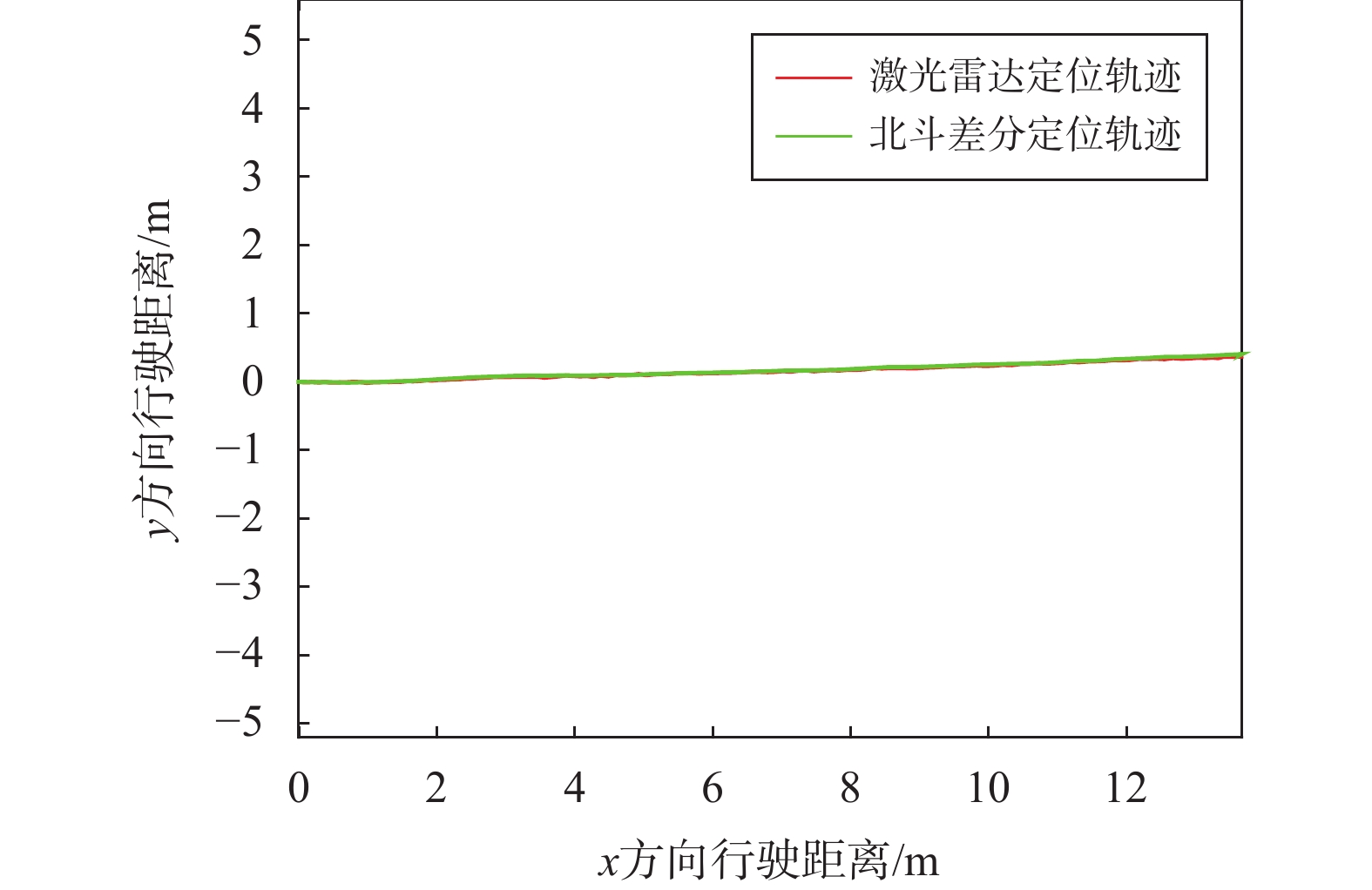
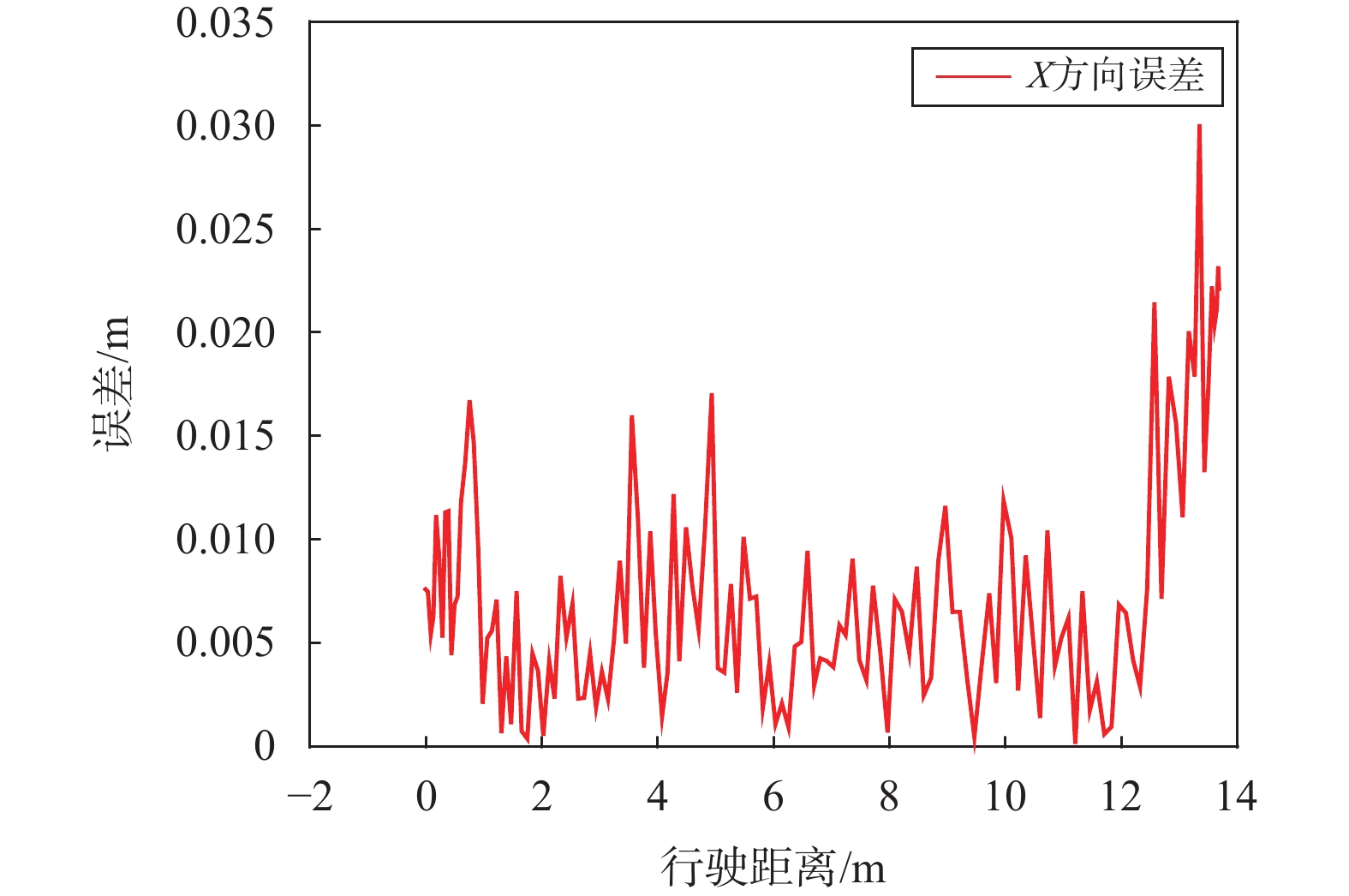
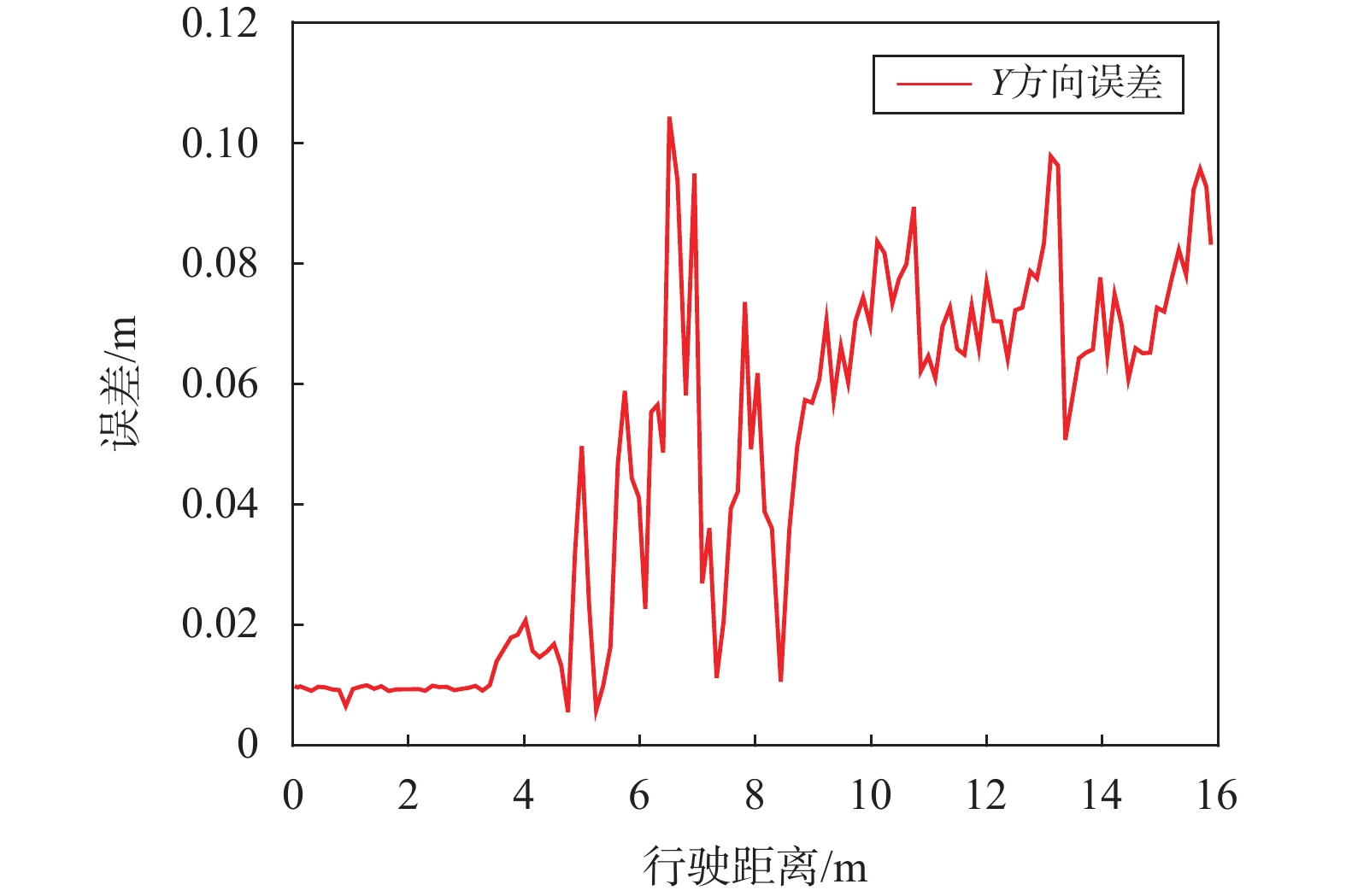
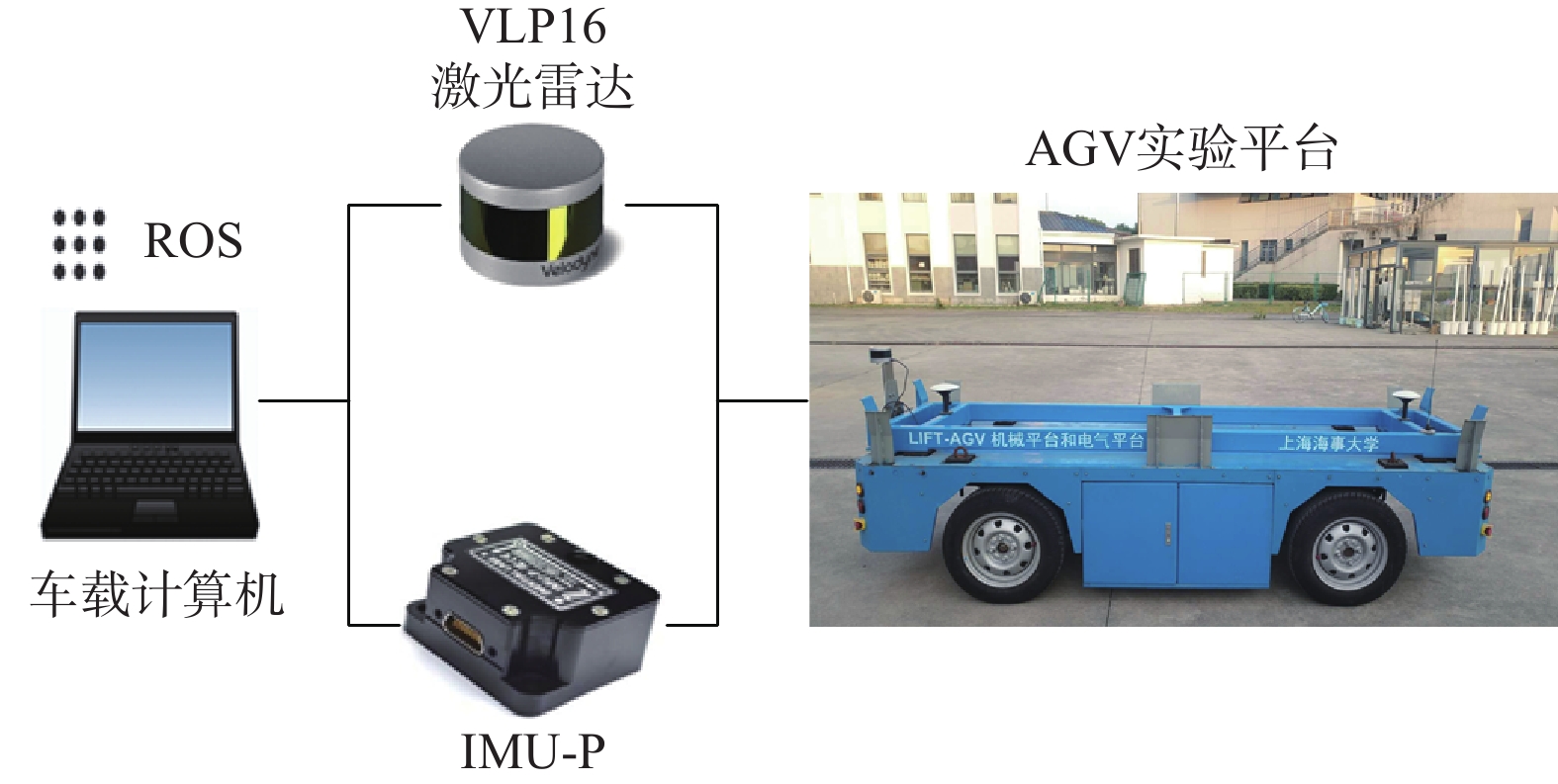
摘要: 针对港口岸边作业区和堆场内部等特定场景影响无人车辆高精度定位的问题,本工作以Cartographer 同步定位与建图(SLAM)作为算法基础,研究了基于反射靶标的无人车辆高精度定位方法,设计优化了反射靶标参数与布置方法. 针对影响基于反射靶标的激光SLAM定位精度的关键参数、行车速度和抖动干扰,设计实现了测试系统并进行了多参数对比. 针对港口场景下易发生的大抖动干扰导致激光SLAM定位失效的问题,分析了定位失效的产生机理,进而研究了基于惯性导航系统(IMU)和激光SLAM的复合定位技术,提出了大抖动干扰情况下基于反射靶标的激光SLAM定位误差的抑制方法. 实验结果表明:上述方案提高了无人车辆在港口特定场景下的定位精度和定位方法鲁棒性.
-
关键词:
- 激光同步定位与建图(SLAM) /
- 反射靶标 /
- 定位 /
- 抖动干扰 /
- 信息融合
Abstract: Facing the problem that in some specific scenarios in port, such as the shore work area and the container yard, the high-precision positioning of unmanned vehicles, this paper uses Cartographer simultaneous localization and mapping (SLAM) algorithm based on reflective targets to solve it. The reflective target parameters and layout method are designed and optimized, and the impact of key parameters inclucling speed and vibration, on the positioning accuracy of laser SLAM based on reflective targets is analyzed. A test system is designed and implemented, and extensive comparison tests are carried out to verify the trend of positioning accuracy. A large vibration can lead to the failure of laser SLAM, which is common in port. Therefore, the mechanism of positioning failure caused by large vibration is analyzed, and the composite positioning technology based on inertial measurement unit (IMU) and laser SLAM is implemented to suppress the positioning error of laser SLAM under a large vibration. The experimental results show that the proposed method improves the positioning accuracy and robustness of laser SLAM for unmanned vehicles in port. -
[1] 殷林. 我国智慧港口建设实践和发展思考[J]. 港口科技, 2019(8): 1-3. DOI: 10.3969/j.issn.1673-6826.2019.08.001 [2] 刘勇. 智慧港口发展现状与展望[J]. 装备维修技术, 2019(3): 53. [3] 张银, 任国全, 程子阳, 等. 三维激光雷达在无人车环境感知中的应用研究[J]. 激光与光电子学进展, 2019, 56(13): 1-11. [4] 李晨曦, 张军, 靳欣宇, 等. 激光雷达SLAM技术及其在无人车中的应用研究进展[J]. 北京联合大学学报, 2017, 31(4): 61-69. [5] GRISETTI G, KÜEMMERLE R, STACHNISS C, et al. A tutorial on graph-based SLAM[J]. IEEE intelligent transportation systems magzine, 2010, 2(4): 31-43. DOI: 10.1109/MITS.2010.939925 [6] 葛泉波, 李文斌, 孙若愚, 等. 基于EKF的集中式融合估计研究[J]. 自动化学报, 2013, 39(6): 816-825. [7] KOHLBRECHER S, STRYK O V, MEYER J, et al. A flexible and scalable SLAM system with full 3D motion estimation[C]//IEEE International Symposium on Safety, Security, and Rescue Robotics, 2011. DOI: 10.1109/SSRR.2011.6106777 [8] GAO Q, JIA H, LIU Y, et al. Design of mobile robot based on cartographer SLAM algorithm[C]//The 2nd International Conference on Informatics, Control and Automation, 2019. DOI: 10.12783/dtcse/ica2019/30762 [9] HESS W, KOHLER D, RAPP H, et al. Real-time loop closure in 2D LIDAR SLAM[C]//IEEE International Conference on Robotics and Automation (ICRA), 2016. DOI: 10.1109/ICRA.2016.7487258 [10] 杨阔. 动态场景下的2D SLAM方法研究[D]. 北京: 北京交通大学, 2018. [11] Velodyne Lidar [EB/OL]. [2021-03-22]. https://velodynelidar.com/products/puck/ [12] Intertial Measurement Units [EB/OL]. [2021-03-22]. https://inertiallabs.com/products/imup/ [13] BEHLEY J, STACHNISS C. Efficient surfel-based SLAM using 3D laser range data in urban environments[C]//Robotics: Science and Systems 2018. DOI: 10.15607/RSS.2018.XIV.016 -

 下载:
下载:
 点击查看大图
点击查看大图
图(18) / 表(2)
计量
- 文章访问数: 700
- HTML全文浏览量: 229
- PDF下载量: 50
- 被引次数: 0
