

Adaptive sliding mode heading control of unmanned semi-submersible surveying vehicle
-
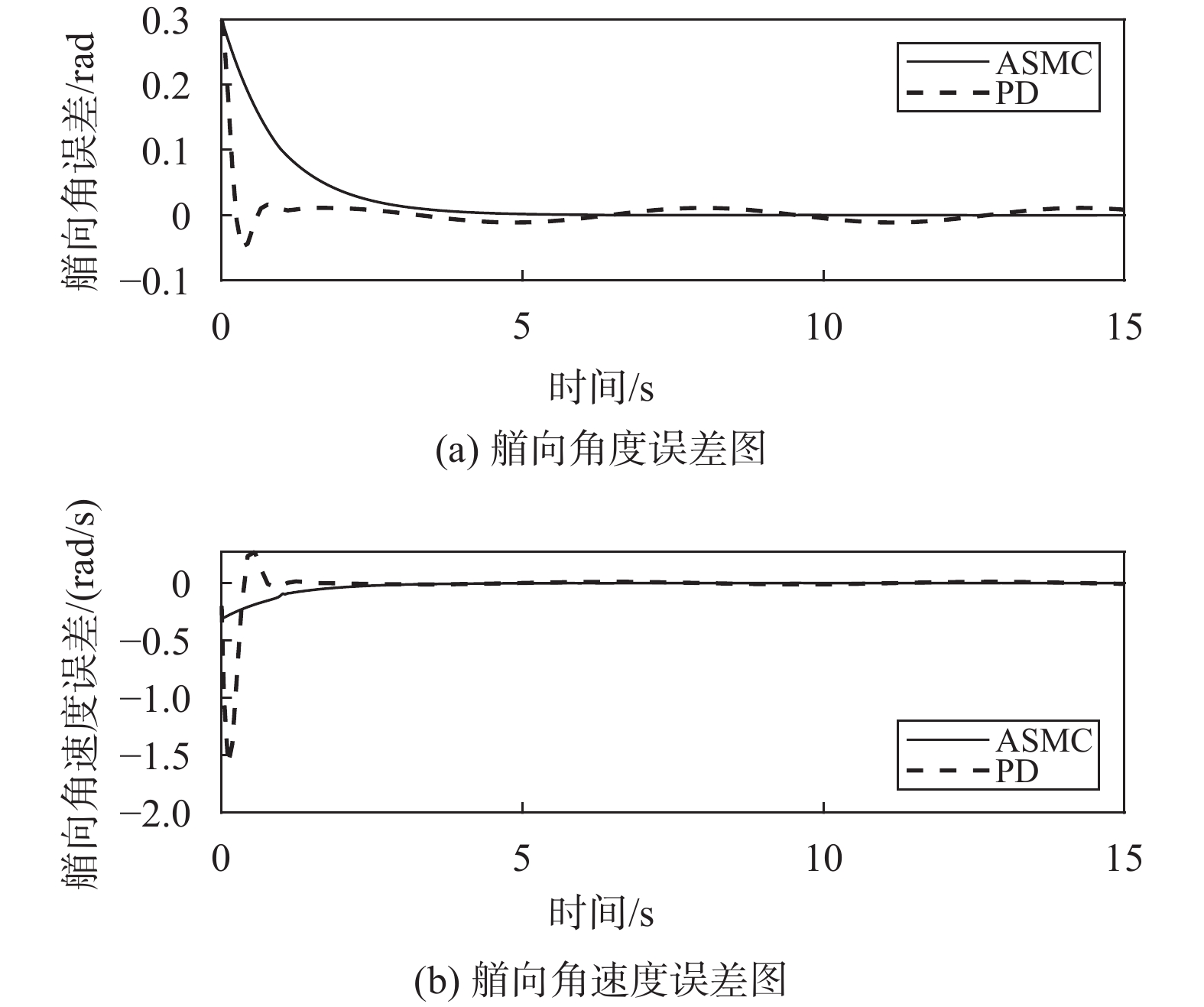
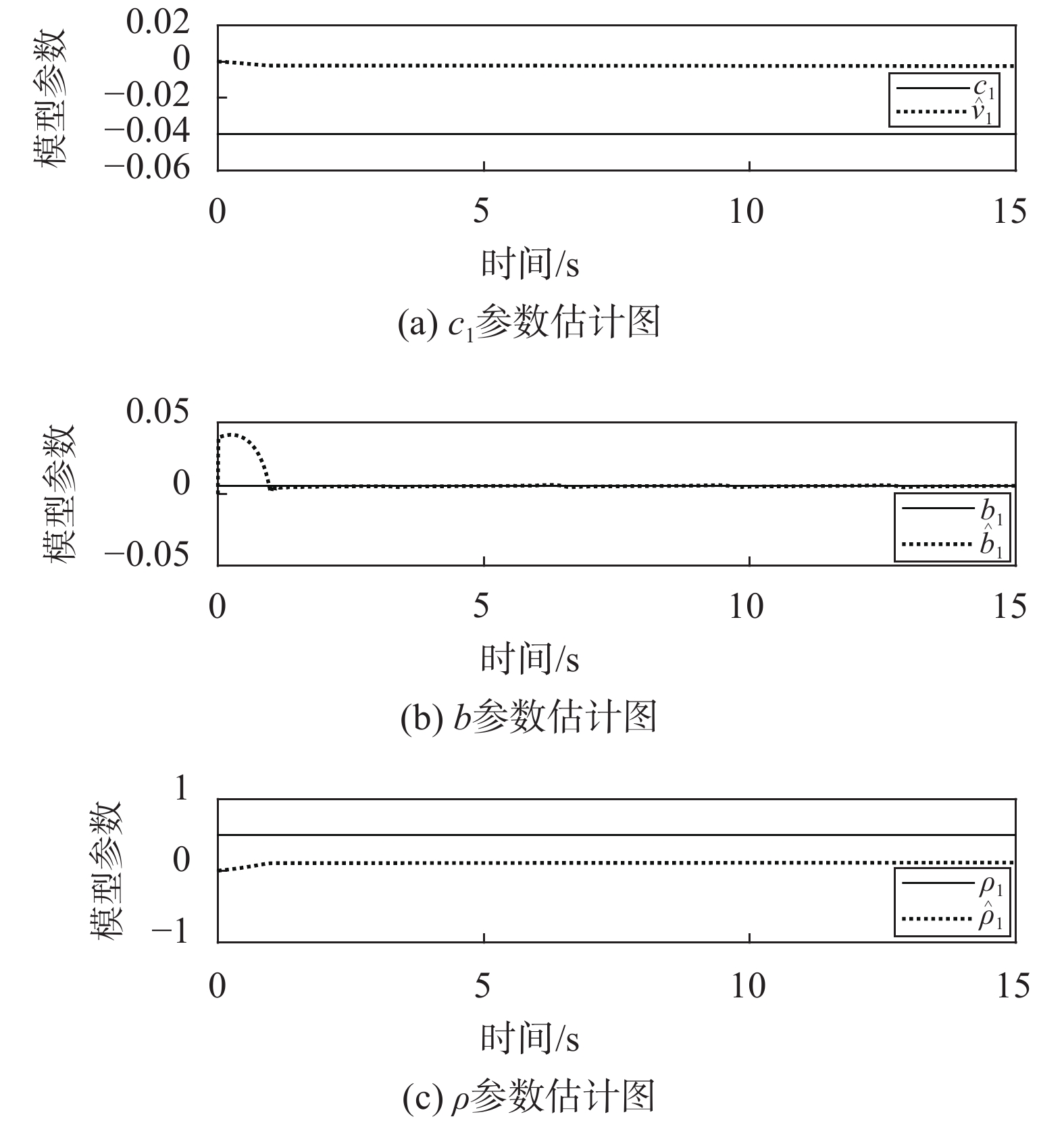
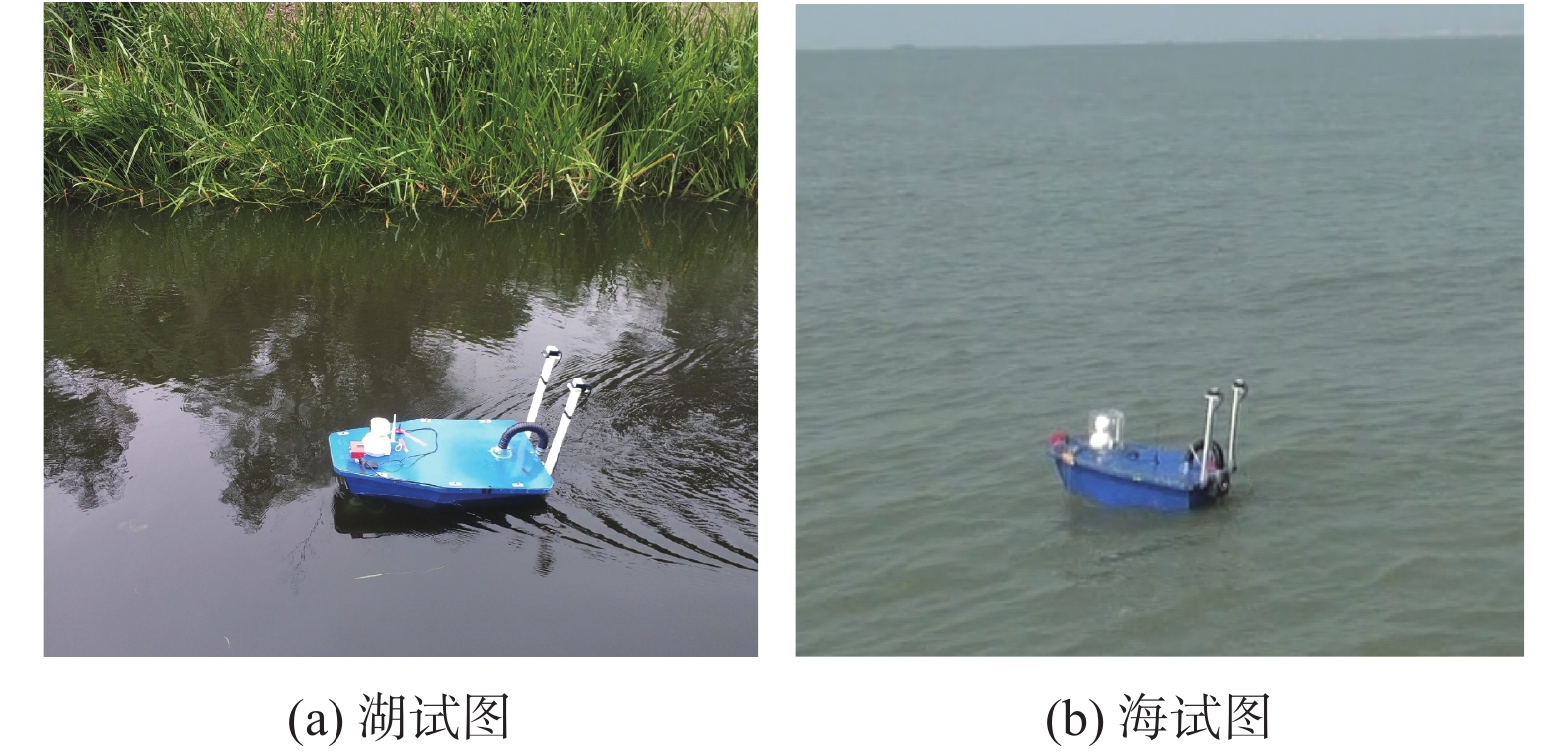
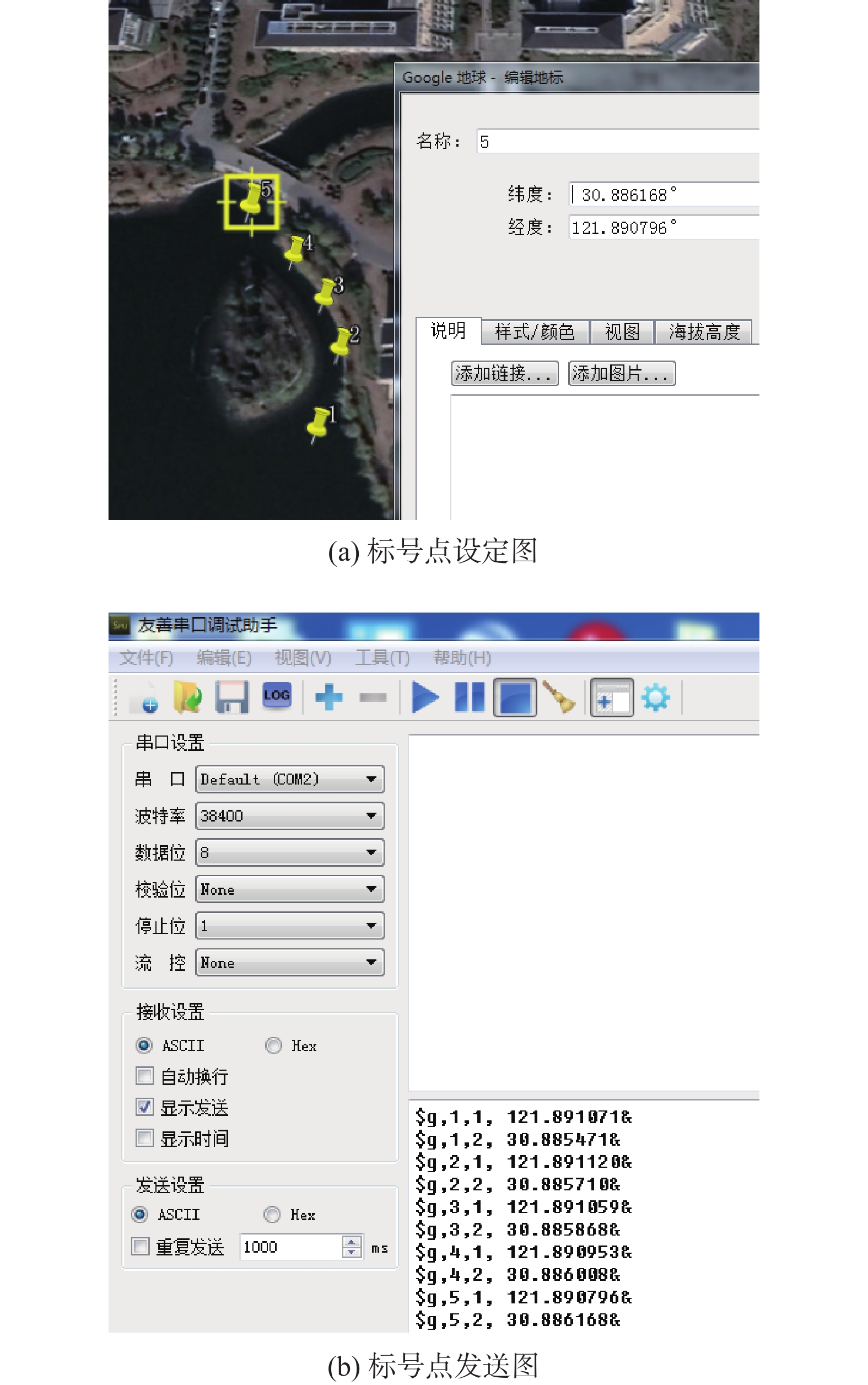
摘要: 海洋是高质量发展的战略要地,海洋监测则是认识海洋、发展海洋的重要支撑技术. 随着 “一带一路”等海洋强国战略的不断实施,对海洋测量装备提出了更高的要求. 为此,利用全球定位系统/北斗卫星导航系统(GPS/BDS)组合系统和电子罗盘提供高精度位置和艏向信息,并搭载监测器件,将新型半潜式无人艇应用于海洋环境监测. 针对路线巡航中半潜式无人艇模型参数不确定和环境干扰对艏向监测的可靠性和稳定性的影响,结合滑模控制(SMC)的强鲁棒性与自适应控制的高适应性设计了一种自适应滑模控制(ASMC)方法. 理论分析和仿真实验证明,ASMC的可行性和有效性,比传统的比例微分(PD)控制具有更好的适应性和鲁棒性,而且系统瞬态性能和稳定性良好. 将设计的ASMC方法应用于实际监测中,试验结果表明:控制效果稳定,测量数据真实可靠,提高了测量效率.
-
关键词:
- 海洋监测 /
- 半潜式无人艇 /
- 艏向控制 /
- 全球定位系统/北斗卫星导航系统(GPS/BDS) /
- 电子罗盘 /
- 自适应滑模控制(ASMC)
Abstract: The ocean is a strategic important for the national high-quality development, and marine monitoring is an important way to understand and develop the ocean. With the continuous implementation of Marine power strategy such as "One Belt And One Road", higher requirements are put forward for Marine surveying equipment. Therefore, using the combined GPS/BDS system and electronic compass to provide high-precision position and heading information, and equipped with monitoring devices, the new unmanned semi-submersible vehicle is applied to marine environmental monitoring. Aiming at the influence of uncertain model parameters and environmental disturbance on the reliability and stability of the heading monitoring of unmanned semi-submersible vehicle, an adaptive sliding mode control (ASMC) method was designed based on the strong robustness of sliding mode control (SMC) and the high adaptability of adaptive control. Theoretical analysis and simulation experiments show that the ASMC is feasible and effective, and has better adaptability and robustness than the traditional proportional plus denriva tive (PD) control, and the system has good transient performance and stability. The designed adaptive sliding mode control method is applied to actual marine monitoring, and the test results show that the control effect is stable, the surveying data is real and reliable, and the surveying efficiency is improved. -
[1] 漆随平, 厉运周. 海洋环境监测技术及仪器装备的发展现状与趋势[J]. 山东科学, 2019, 32(5): 21-30. DOI: 10.3976/j.issn.1002-4026.2019.05.002 [2] 蔡陈玉. 基于北斗的船舶监控系统设计与开发[D]. 上海: 上海海洋大学, 2018. [3] 姜少杰, 刘海敌, 王宪. 基于GPS的自动巡航监测船系统的设计与实现[J]. 全球定位系统, 2017, 42(3): 77-81. [4] 王永鼎, 李华南, 钱莹娟. 北斗卫星导航系统在AUV中的应用研究[J]. 全球定位系统, 2018, 43(1): 96-102. [5] 崔秀芳, 李培培, 石福孝, 等. 基于BDS的水质检测仿生鱼控制系统设计[J]. 全球定位系统, 2020, 45(5): 72-76. [6] 申家双, 葛忠孝, 陈长林. 我国海洋测绘研究进展[J]. 海洋测绘, 2018, 38(4): 1-10, 21. DOI: 10.3969/j.issn.1671-3044.2018.04.001 [7] 丁福光, 闫志辉. 基于模糊PID串级控制的航迹保持方法[J]. 船舶工程, 2009, 31(1): 35-37. DOI: 10.3969/j.issn.1000-6982.2009.01.010 [8] LORIA A, FOSSEN T I, PANTELEY E. A separation principle for dynamic positioning of ships: theoretical and experimental results[J]. IEEE transactions on control systems technology, 2000, 8(2): 332-343. DOI: 10.1109/87.826804 [9] 谷丽丽, 邓志良. 动态模糊神经网络在船舶动力定位中的应用[J]. 船舶工程, 2006(2): 43-46. DOI: 10.3969/j.issn.1000-6982.2006.02.012 [10] HU X, DU J L, SHI J W. Adaptive fuzzy controller design for dynamic positioning system of vessels[J]. Applied ocean research, 2015, 53: 46-53. DOI: 10.1016/j.apor.2015.07.005 [11] 刘金琨, 孙富春. 滑模变结构控制理论及其算法研究与进展[J]. 控制理论与应用, 2007, 24(3): 407-418. DOI: 10.3969/j.issn.1000-8152.2007.03.015 [12] 赵涛, 何龙, 李卫, 等. 一种半潜式无人艇的设计[J]. 上海海洋大学学报, 2019, 28(2): 313-319. [13] FOSSEN T I. Guidance and control of ocean vehicles[M]. New Jersey: John Wiley and Sons Inc, 1994. [14] 贵岛, 芳村. 浅水域船的操纵运动数学模型[J]. 日本造船学会志, 1989(718): 20-220. [15] 施生达. 潜艇操纵性[M]. 北京: 国防工业出版社, 2021. [16] 洪剑青, 赵德安, 孙月平, 等. 水产养殖自动导航无人明轮船航向的多模自适应控制[J]. 农业工程学报, 2017, 33(1): 95-101. DOI: 10.11975/j.issn.1002-6819.2017.01.013 [17] 康伟, 褚建新, 黄辉, 等. 可回转双桨电力推进船舶运动模型的研究[J]. 中国造船, 2012, 53(1): 107-116. [18] 孙树蕾. 可回转双机双桨船模糊神经网络航向控制[D]. 大连: 大连海事大学, 2015. [19] 胡忠辉. 船舶航向运动非线性自适应及优化控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2013. [20] NOMOTO K, TAGUCHI T, HONDA K, et al. On the steering qualities of ship[J]. International shipbuilding progress, 1957, 4(35): 354-370. DOI: 10.3233/ISP-1957-43504 [21] SLOTINE J-J E. Applied nonlinear control[M]. Upper Saddle River: Prentice Hall, 1991. -

 下载:
下载:






 点击查看大图
点击查看大图
图(12) / 表(3)
计量
- 文章访问数: 562
- HTML全文浏览量: 182
- PDF下载量: 28
- 被引次数: 0
