

Performance analysis of BDS/GNSS precision point positioning
-
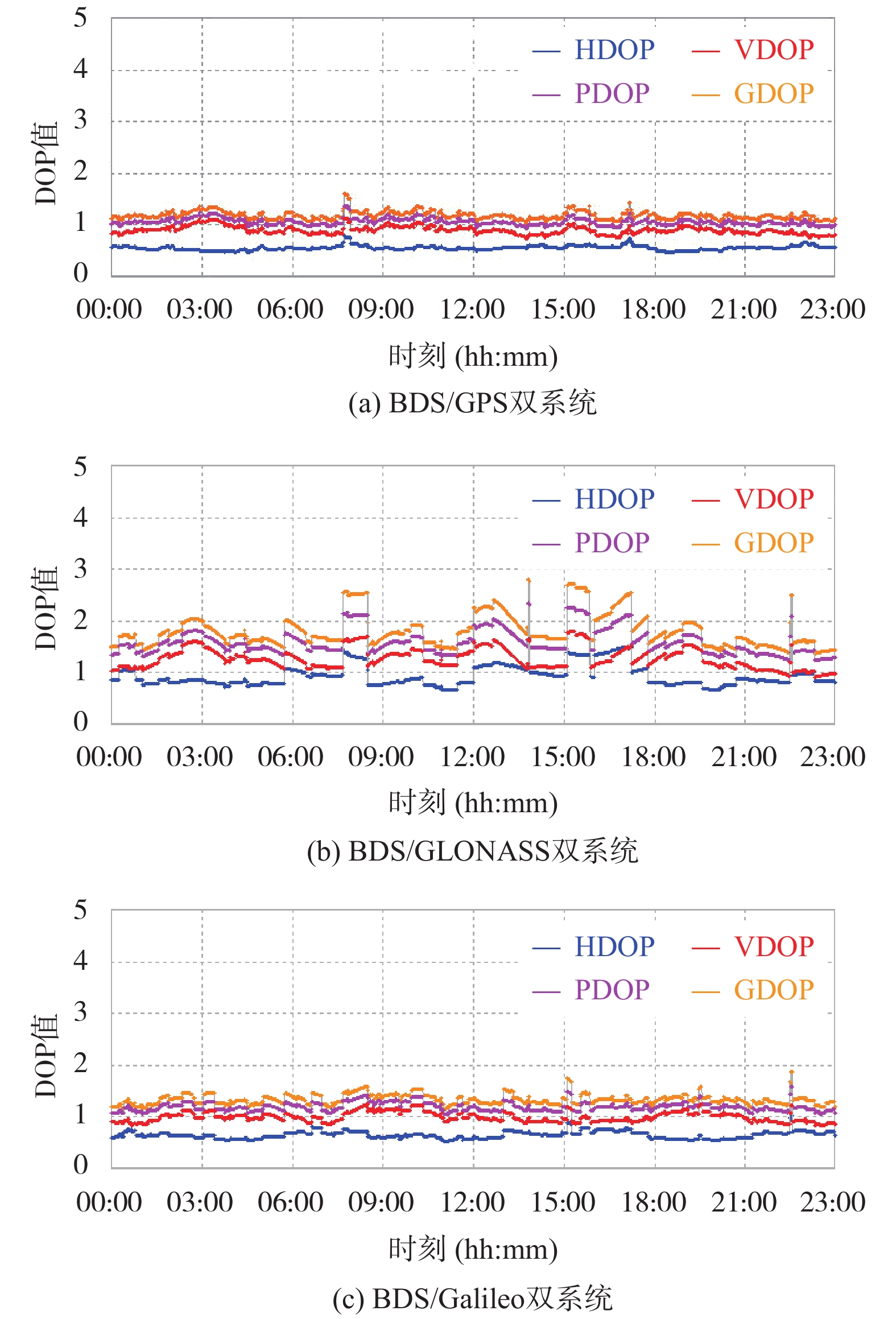
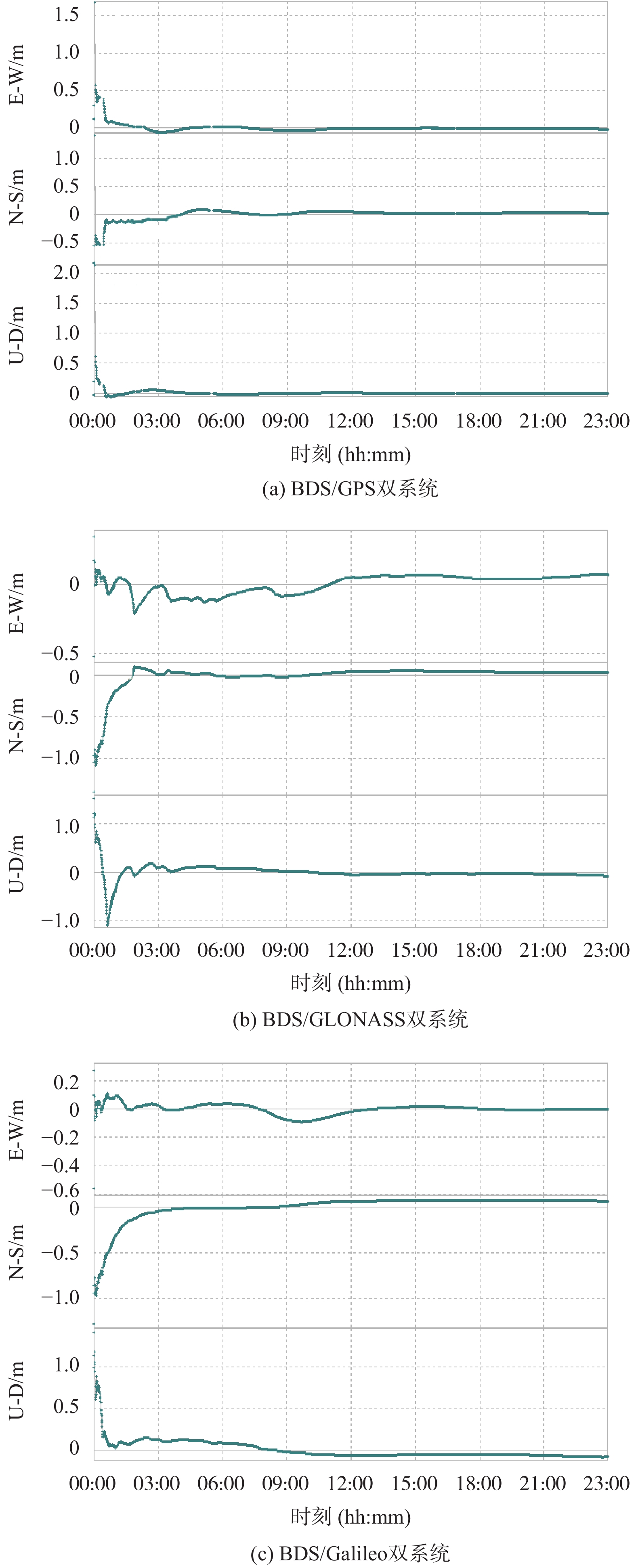
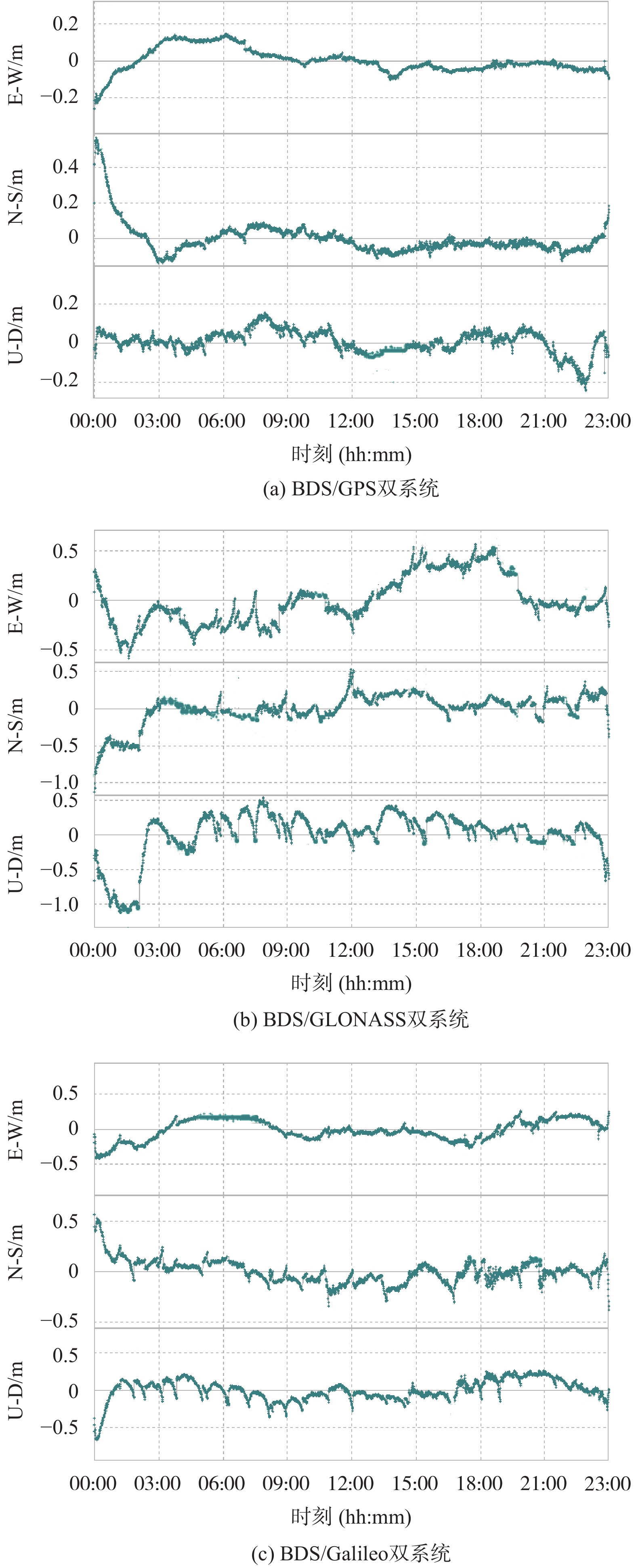
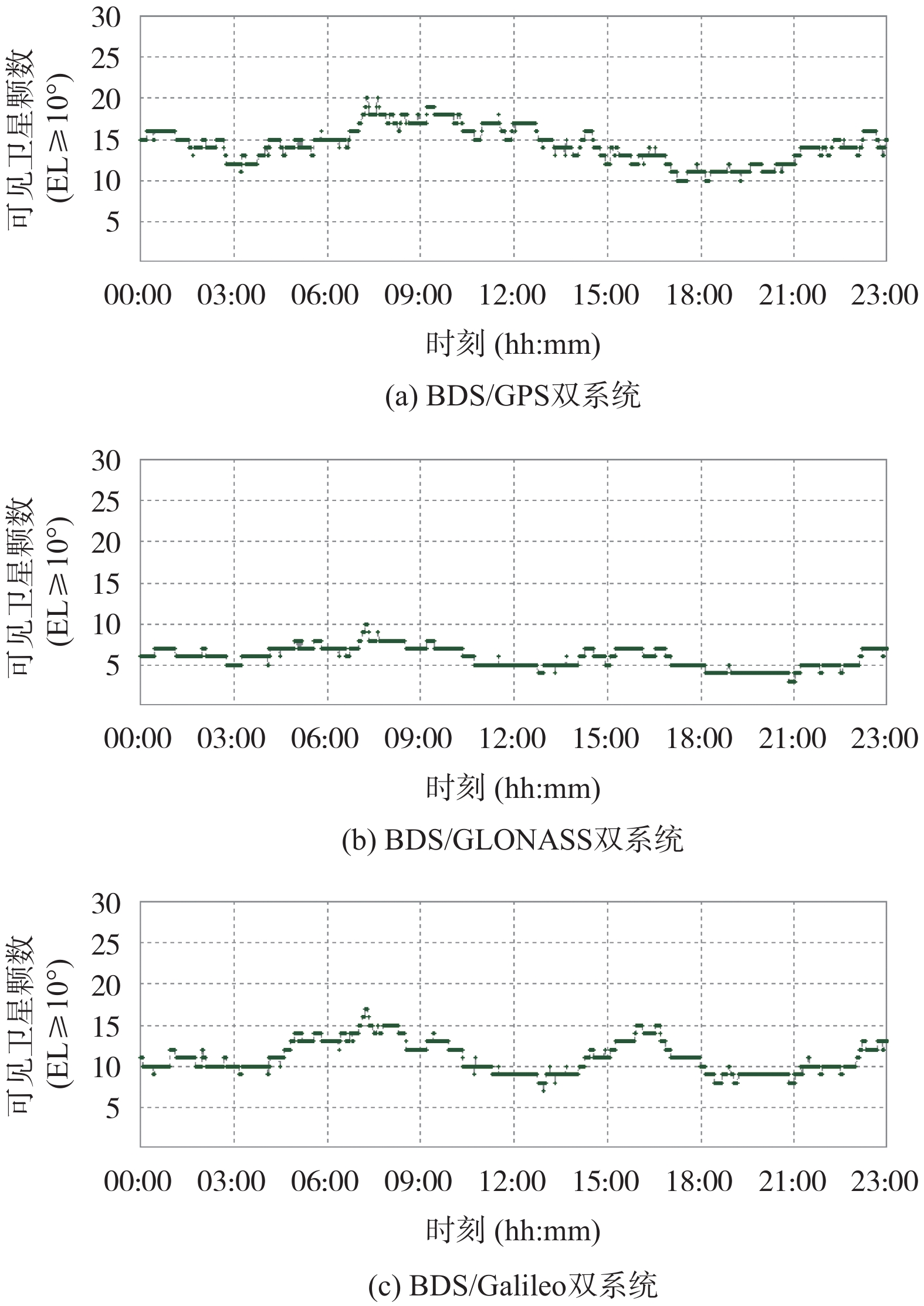
摘要: 随着北斗卫星导航系统(BDS)的全球组网成功,基于BDS的应用研究正在如火如荼的进行中,尤其是包括BDS在内的多频多模融合定位正成为研究的重点. 利用MGEX (Multi-GNSS Experiment)多个测站的BDS、GPS、GLONASS、Galileo观测数据,基于RTKLIB开源代码,在Visual Studio 2017平台上进行了BDS/GPS、BDS/GLONASS、BDS/Galileo三种组合系统的精密单点定位(PPP)实验,从静态PPP、动态PPP、可见卫星数、精度衰减因子(DOP)等方面对比分析了三种组合系统的定位性能. 实验结果表明:BDS/GPS组合系统的可见卫星数最多,各DOP值最小,静态PPP收敛后三个方向的精度优于6 cm. 不论是静态PPP还是动态PPP,其定位性能都最好;BDS/GLONASS、BDS/Galileo组合系统动态PPP的定位抖动较大,可见卫星数都要小于BDS/GPS组合系统,收敛时间较长,两者的动态PPP定位性能也差于BDS/GPS组合系统.
-
关键词:
- 精密单点定位(PPP) /
- BDS/GNSS /
- 定位性能分析 /
- MGEX /
- RTKLIB
Abstract: With the success of the global networking of the BeiDou Navigation Satellite System (BDS), the application research based on the BDS is in full swing, especially the multi-frequency and multi-mode fusion positioning including BDS is becoming the focus of research. This article uses BDS (BDS-3), GPS, GLONASS, and Galileo observation data from multiple stations in the MGEX (Multi-GNSS Experiment), based on RTKLIB open source code, and performs the precision point positioning experiment of the three combined systems BDS/GPS, BDS/GLONASS, and BDS/Galileo on the Visual Studio 2017 platform. The positioning performance of the three combined systems is compared and analyzed from static PPP, dynamic PPP, number of visible satellites, and attenuation of precision (DOP). The experimental results show that the BDS/GPS combined system has the largest number of visible satellites and the smallest DOP value. The accuracy of the three directions after static PPP convergence is better than 6 cm. Whether it is static or dynamic, its positioning performance is the best. The dynamic precise point positioning (PPP) positioning jitter of the BDS/GLONASS and BDS/Galileo combined system is relatively large. It can be seen that the number of satellites is smaller than the BDS/GPS combined system, and the convergence time is longer. The dynamic PPP positioning performance of the two is also worse than that of the BDS/GPS combined system.-
Key words:
- precise point positioning /
- BDS/GNSS /
- positioning performance analysis /
- MGEX /
- RTKLIB
-
表 1 GNSS在轨工作卫星数目一览表
定位
系统在轨卫星
颗数在轨工作
卫星颗数维修与测试
卫星颗数规划卫星
颗数BDS 20+19 15+18 5+1 24+3+3 GPS 32 31 1 24 GLONASS 26 24 3 24 Galileo 26 20 4 24 WAAS 3 3 EGNOS 4 4 SDCM 3 3 QZSS 4 4  下载: 导出CSV
下载: 导出CSV
表 2 双系统PPP数据处理策略
参数 处理策略 观测量 GPS、BDS、GLONASS、Galileo
相位和伪距观测值卫星信号 GPS:L1/L2;BDS:B1/B2;
GLONASS:L1/L2;Galileo:E1/E5采样间隔/s 30 截止高度角/(°) 10 电离层延迟 消电离层组合 对流层延迟 Saastamoinen+随机游走 相位缠绕 模型改正 相对论效应 模型改正 卫星钟差 MGEX CLK产品 卫星轨道 MGEX SP3产品 固体潮汐 模型改正 地球自转 模型改正 接收机钟差 WN ISB 估计 测站坐标 估计(静态PPP,动态PPP) 模糊度 估计
下载: 导出CSV
表 3 测站信息
(°) 测站 经度 纬度 HKSL 113.5 22.1 BJFS 116.0 40.1 CHAN 125.4 43.8 JFNG 114.2 30.3 MIZU 141.1 39.1
下载: 导出CSV
表 4 2019年10月3日各测站1天的静态PPP RMS值
m 测站 BDS/GPS BDS/GLONASS BDS/Galileo E N U E N U E N U BJFS 0.047 0.040 0.059 0.088 0.071 0.080 0.069 0.079 0.086 CHAN 0.053 0.048 0.069 0.079 0.070 0.080 0.076 0.080 0.088 JFNG 0.057 0.046 0.063 0.083 0.076 0.089 0.070 0.062 0.077 HKSL 0.048 0.029 0.067 0.082 0.073 0.090 0.073 0.070 0.080 MIZU 0.059 0.047 0.068 0.086 0.073 0.092 0.073 0.069 0.081
下载: 导出CSV
-
[1] 杜祯强, 柴洪洲, 向民志, 等. 3种PPP模型的统一模糊度固定方法[J]. 测绘学报, 2020, 49(7): 824-832. [2] 吕伟才, 高井祥. GPS/Galileo系统间偏差的随机模型对三频动态PPP的影响[J]. 中国矿业大学学报, 2019, 48(6): 1383-1390. [3] 屈利忠, 赵齐乐, 郭靖, 等. GNSS融合动态精密单点定位性能分析[J]. 大地测量与地球动力学, 2016, 36(4): 298-302. [4] 魏二虎, 刘学习, 王凌轩, 等. BDS/GPS组合精密单点定位精度分析与评价[J]. 武汉大学学报(信息科学版), 2018, 43(11): 1654-1660. [5] 王瑞, 柴洪洲, 刘增, 等. GPS/GLONASS组合实时动态精密单点定位[J]. 海洋测绘, 2019, 39(1): 14-18. DOI: 10.3969/j.issn.1671-3044.2019.01.004 [6] 任晓东, 张柯柯, 李星星, 等. BeiDou、Galileo、GLONASS、GPS多系统融合精密单点[J]. 测绘学报, 2015, 44(12): 1307-1313, 1339. [7] 李杰, 郑作亚, 张大众, 等. Android移动终端单频BDS/GPS实时PPP技术研究[J]. 测绘科学, 2019, 44(3): 149-153. [8] LI X X, LI X, YUAN Y Q, et al. Multi-GNSS phase delay estimation and PPP ambiguity resolution: GPS, BDS, GLONASS, Galileo[J]. Journal of geodesy, 2018, 92(6): 579-608. DOI: 10.1007/s00190-017-1081-3 [9] 刘学习. BDS/GPS组合精密单点定位及其模糊度固定技术与方法研究[D]. 武汉: 武汉大学, 2018. [10] GENG T, ZHANG P, WANG W, et al. Comparison of ultra-rapid orbit prediction strategies for GPS, GLONASS, Galileo and BeiDou[J]. Sensors, 2018, 18(2): 477. DOI: 10.3390/s18020477 [11] 董永祥. 多系统GNSS组合动态精密单点定位算法研究[D]. 淮南: 安徽理工大学, 2019. [12] 苗维凯, 陈旭升, 刘洋洋. GNSS多系统组合PPP解算方法与成果分析[J]. 大地测量与地球动力学, 2019, 39(5): 521-527. [13] 杨晓伟. GNSS精密单点定位算法研究与精度分析[D]. 徐州: 中国矿业大学, 2019. [14] LI X X, ZHANG X H, REN X D, et al. Precise positioning with current multi-constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou[J]. Scientific reports, 2015, 5(1): 8328. DOI: 10.1038/srep08328 [15] TEGEDOR J, OVSTEDAL O, VIGEN E. Precise orbit determination and point positioning using GPS, GLONASS, Galileo and BeiDou[J]. Journal of geodetic science, 2014, 4(1): 65-73. DOI: 10.2478/jogs-2014-0008 -

 点击查看大图
点击查看大图
图(4) / 表(4)
计量
- 文章访问数: 592
- HTML全文浏览量: 176
- PDF下载量: 67
- 被引次数: 0
