
Analysis of positioning performance of BDS-3/GPS in shadow environment
-
摘要: 针对在全球卫星导航系统(GNSS)信号易遮挡地区,单一系统可见卫星数较少,定位性能不理想甚至难以满足定位需求的问题,分析北斗三号(BDS-3)在不同区域遮挡环境下对定位性能的改善. 通过全球不同区域MGEX(Multi-GNSS Experiment)监测站的观测数据,采用GPS、BDS-3、BDS-3/GPS组合定位三种模式,在不同模拟遮挡环境下进行伪距单点定位,分析了各模式下可见卫星颗数、历元利用率、几何精度衰减因子(GDOP)值和定位精度. 结果表明:在北半球区域,相较于其他方向遮挡,GPS模式在低纬度地区南面遮挡的定位稳定性和精度最高,在中高纬度地区北面遮挡的定位稳定性和精度最高,BDS-3和BDS-3/GPS组合模式在低纬度地区各方向遮挡定位精度相当,在中纬度和中高纬度地区,北面遮挡的精度明显优于其他方向遮挡的定位精度. BDS-3/GPS组合定位模式,大大增加了可见卫星颗数,历元利用率提高,卫星空间几何结构改善,GDOP值降低,稳定性和定位精度明显优于单系统.
-
关键词:
- 北斗三号(BDS-3) /
- 全球定位系统(GPS) /
- 组合定位 /
- 遮挡环境 /
- 几何精度衰减因子(GDOP) /
- 定位精度
Abstract: In areas where GNSS signals are easily sheltered, the number of visible satellites in a single navigation system is small, and the positioning performance is not ideal or even difficult to meet the requrements of positioning needs. In this paper, the improvement of BDS-3's positioning performance in shadow environments is analyzed in different area. Based on the observation data of MGEX monitoring stations in different regions of the world, three modes of GPS, BDS-3, and BDS-3/GPS combined positioning are used to perform pseudo-range single-point positioning under different simulated shadow environments, and the number of visible satellites in each mode is analyzed, together with epoch utilization, GDOP value and positioning accuracy. The results show that in the northern hemisphere, compared to shadow in other direction, the GPS mode has the highest positioning stability and accuracy in the south of low latitudes, and the highest positioning stability and accuracy in the north of the middle and high latitudes. BDS-3 and BDS-3/GPS mode has the same positioning accuracy in all directions in low latitude areas. In mid-latitude and mid-high latitude areas, the accuracy of north shadowed is significantly better when shadow is in the north direction than that of other directions. The BDS-3/GPS combined positioning mode greatly increases the number of available satellites, improves the epoch utilization rate, improves the satellite spatial geometry, and reduces the GDOP value, which is significantly better than a single system in stability and positioning accuracy.-
Keywords:
- BDS-3 /
- GPS /
- combination positioning /
- shadow environment /
- GDOP /
- positioning accuracy
-
0. 引 言
全球卫星导航系统(GNSS)已成为人们获取位置和时间信息的重要手段,具备全球性、全天候、高精度的导航定位能力. 但是在城市、峡谷、建筑物密集区、边坡、山区等信号易遮挡地区,单系统可见卫星颗数较少[1],定位精度及连续性等性能都会有所下降[2]. 北斗卫星导航系统(BDS)是我国自主建设、独立运行的全球卫星导航系统. 2020年6月23日9时43分,北斗三号(BDS-3)最后一颗全球组网卫星在西昌卫星发射中心成功发射,至此BDS-3星座部署全面完成. BDS-3系统包括24颗中圆地球轨道(MEO)卫星,3颗倾斜地球同步轨道(IGSO)卫星和3颗地球静止轨道(GEO)卫星,创新性地采用GEO/IGSO/MEO三种轨道混合星座. BDS与GPS具有良好的兼容性与互操作性,组合定位可以增加可见卫星数,改善卫星空间几何结构,提高定位的稳定性和精度. BDS与GPS的组合定位也将是未来GNSS的重要发展方向[3].
国内外学者对BDS和GPS伪距单点定位进行了大量研究,基于国际GNSS监测评估系统(iGMAS)观测值数据和多星座实验MGEX(Multi-GNSS Experiment)监测网的数据[4-5],分析了GPS、BDS-3及BDS-3/GPS组合伪距单点定位性能[6-8],不同区域的定位精度变化[9],以及不同遮挡环境下定位精度的对比[10],论证了遮挡环境下组合定位可有效提高定位的稳定性和精度. 然而,以上研究仅限于BDS-3部分卫星,并且在遮挡环境下的测站较少,分布区域过于单一. 2020年BDS-3组网成功,BDS-3全部星座参与定位的性能有待研究. 本文基于全球9个MGEX跟踪站数据,分析了BDS-3/GPS组合定位在不同遮挡情况下,对卫星可见性、历元利用率、几何精度衰减因子(GDOP)和定位精度的改善.
1. 伪距单点定位原理
由于具有解算速度快、无需考虑整周模糊度等优点,伪距单点定位在实际中得到了广泛的应用[11]. 伪距组合定位的基本思想是将两种导航定位系统的伪距观测值及相关误差放在一起进行联合平差解算[12]. BDS和GPS伪距单点定位的观测方程为如下:
$$\begin{split} {\rho _i} = & \sqrt {{{({X_i^{\rm{S}}} - X)}^2} + {{({Y_i^{\rm{S}}} - Y)}^2} + {{({Z_i^{\rm{S}}} - Z)}^2}}+ \\& {I_i} + {T_i} + c{{V^{\rm{C}}_{t^{\rm{R}}}}} - c{V^i_{t^{\rm{S}}}},i = 1,2,\cdots,m. \end{split}$$ (1) $$\begin{split} {\rho _j} =& \sqrt {{{({X_j}^{\rm{S}} - X)}^2} + {{({Y_j}^{\rm{S}} - Y)}^2} + {{({Z_j}^{\rm{S}} - Z)}^2}} +\\& {I_j} + {T_j} + c{V^{\rm{G}}_{t{^{\rm{R}}}}} - c{V^j_{{t^{\rm{S}}}}},j = 1,2,\cdots,n. \end{split}$$ (2) 式中:下标
$i$ 、$j$ 分别为BDS、GPS卫星序号,(${X^{\rm{S}}}$ ,${Y^{\rm{S}}}$ ,${Z^{\rm{S}}}$ )为卫星坐标;${I_{}}$ 为电离层延迟改正;$T$ 为对流层延迟改正;$c$ 为真空中光速;${V^{\rm{C}}_{{t^{\rm{R}}}}}$ 和${V^{\rm{G}}_{{t{^{\rm{R}}}}}}$ 为BDS和GPS接收机钟差,${V_{{t^{\rm{S}}}}}$ 为卫星钟差. BDS和GPS采用北斗时(BDST)和GPS时(GPST),二者均采用原子时时间基准,但由于协调世界时(UTC)闰秒,BDST与GPST之间需考虑14 s的偏差. BDS系统采用2000中国大地坐标系(CSCD2000)[13],GPS采用WGS-84坐标系,二者的差异在cm级别[14],伪距单点定位精度在m级,所以可以忽略该差异.假设接收机的近似坐标为(
${X_0}$ ,${Y_0}$ ,${Z_0}$ ),将式(1)、式(2)在(${X_0}$ ,${Y_0}$ ,${Z_0}$ )处泰勒级数展开得到公式如下:$$ \underbrace {\begin{bmatrix} {{V_1}} \\ \vdots \\ {{V_m}} \\ {{V_{m + 1}}} \\ \vdots \\ {{V_{m + n}}} \end{bmatrix} }_V = \underbrace {\begin{bmatrix} {{l_1}}&{{m_1}}&{{n_1}}&1&0 \\ \vdots & \vdots & \vdots & \vdots & \vdots \\ {{l_m}}&{{m_m}}&{{n_m}}&1&0 \\ {{l_{m + 1}}}&{{m_{m + 1}}}&{{n_{m + 1}}}&0&1 \\ \vdots & \vdots & \vdots & \vdots & \vdots \\ {{l_{m + n}}}&{{m_{m + n}}}&{n{}_{m + n}}&0&1 \end{bmatrix}}_B\underbrace {\begin{bmatrix} {dx} \\ {dy} \\ {dz} \\ {c{V^{\rm{C}}_{{t^{\rm{R}}}}}} \\ {c{V^{\rm{G}}_{{t^{\rm{R}}}}}} \end{bmatrix}}_{\hat x} - \underbrace {\begin{bmatrix} {{L_1}} \\ \vdots \\ {{L_m}} \\ {{L_{m + 1}}} \\ \vdots \\ {{L_{m + n}}} \end{bmatrix}}_L. $$ (3) 根据最小二乘原理可得
$$ {{\hat x}} = {({{{B}}^{\rm{T}}}{{PB}})^{ - 1}}{{{B}}^{\rm{T}}}{{PL}}. $$ (4) 式中:
$l$ 、$m$ 、$n$ 为测站至卫星的方向余弦;${{B}}$ 为系数矩阵;${{\hat x}}$ 为待估未知数参数;${{L}}$ 为常数矩阵;${{P}}$ 为观测权矩阵. 通过给定的阈值进行迭代算法计算出改正数,再把参数初始值加上改正数,即可得到接收机的坐标. 单系统含有三个坐标差参数和一个接收机钟差参数,至少需要4颗卫星可以解算,双系统有3个坐标差参数和2个接收机钟差参数,至少需要5颗卫星可以解算.2. 数据处理与精度分析
2.1 数据采集
本文采用9个MGEX站2020年年积日为223的数据,采样间隔为30 s,所选测站能够接收BDS和GPS的信号,并且南北半球、东西半球各有分布,以确保结论具有普适性. 在北半球区域,测站呈现低纬度、中纬度和中高纬度分布,以此来分析在不同纬度地区遮挡环境下的定位性能,具体测站分布情况如图1所示:
对数据进行伪距单点定位处理,截止高度角设为15°,电离层延迟改正采用Klobuchar模型[13, 15-16],对流层延迟改正采用Saastamoinen模型,观测值定权采用高度角定权模型.
2.2 处理方案
本文设计不同方位的遮挡和不同高度的遮挡,剔除遮挡部分的卫星后进行定位解算,模拟多种遮挡环境. 根据方位角遮挡分为:北面遮挡(270°N~360°N和0°N~90°N),东面遮挡(0°E ~180°E),南面遮挡(90°S ~270°S),西面遮挡(180°W ~360°W);根据高度角遮挡分为:高度角遮挡80°为严重遮挡,高度角遮挡60°为中等遮挡,高度角遮挡40°为轻度遮挡. 因此,每个测站共有12种遮挡情况. 在不同遮挡情况下,使用GPS、BDS-3和BDS-3/GPS组合定位三种模式,对WUH2、CUSV、PIMO、GUAM、ULAB、FFMJ、WARN、STHL、KRGG测站2020年年积日为223的观测数据进行定位处理,对定位结果从可用历元数、可见卫星颗数、GDOP值和位置精度均方根(RMS)值进行比较分析.
2.3 结果分析
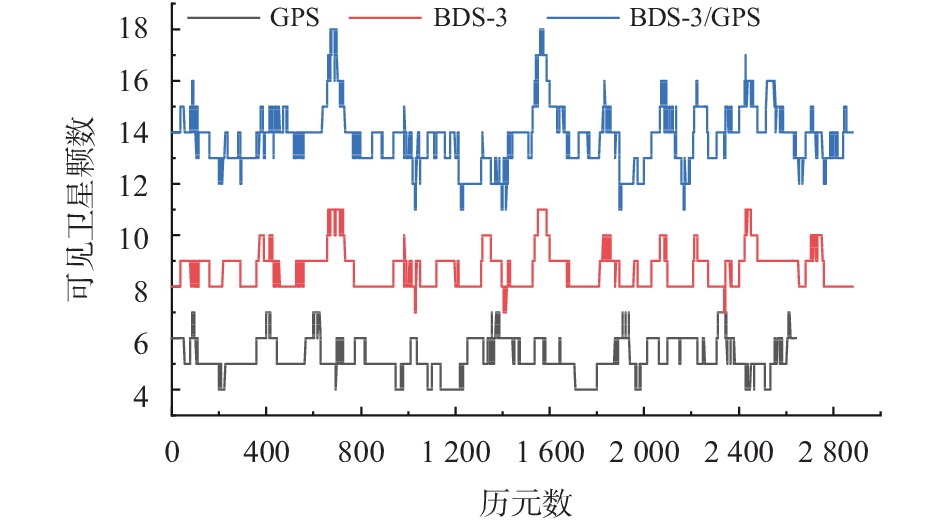
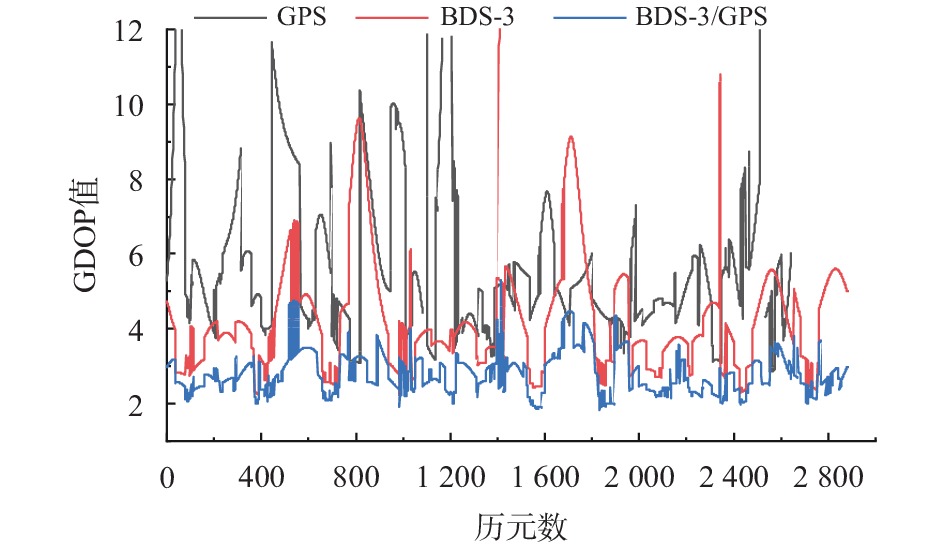
卫星导航系统在准确性和可用性方面的性能与卫星数量以及卫星空间几何结构有很强的相关性,GDOP值能够反映卫星几何结构,GDOP值越低,卫星空间几何结构越优[17]. 以WUH2站北面轻度遮挡为例,图2、图3分别分析了在GPS、BDS-3、BDS-3/GPS三种模式下的可见卫星颗数和GDOP值.
由图2可知,GPS可见卫星数为4~7颗,BDS-3的可见卫星数为7~11颗,BDS-3可见卫星颗数多于GPS,是因为亚太地区BDS-3有GEO与IGSO卫星,增加了BDS-3系统的可见卫星颗数,BDS-3/GPS可见卫星数为11~18颗,确保了有充足的可见卫星颗数参与定位. 由图3可知,BDS-3的GDOP值略低于GPS,但有些历元波动较大,BDS-3/GPS的GDOP值较稳定,维持在5颗以内,卫星空间几何结构明显优于单系统.
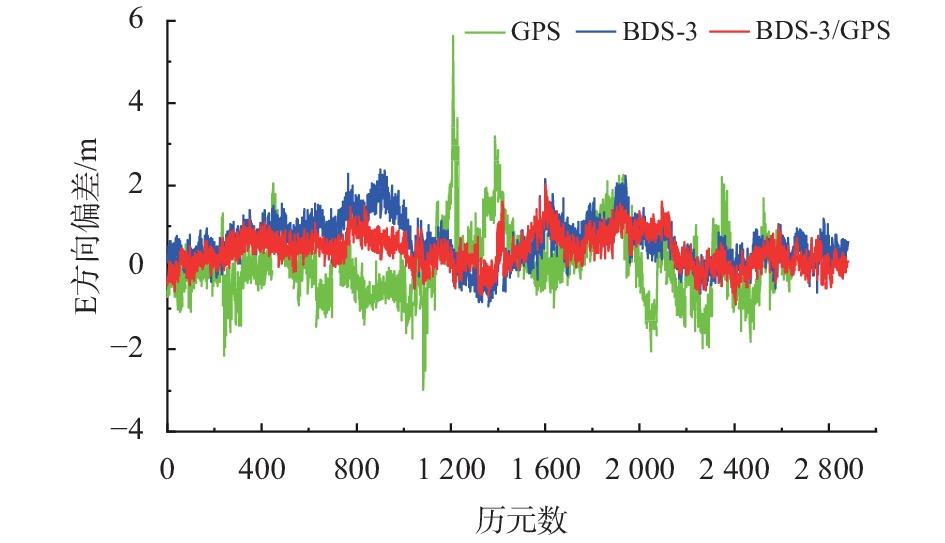
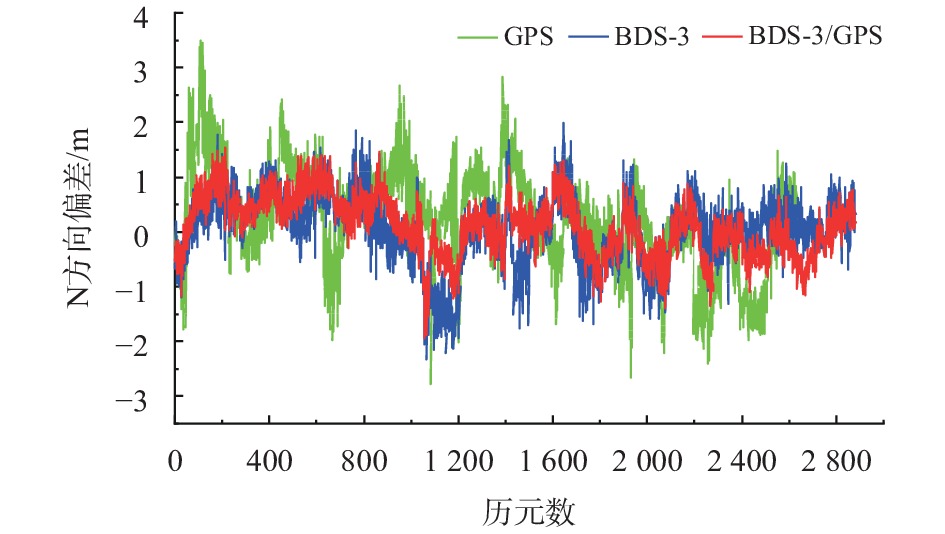
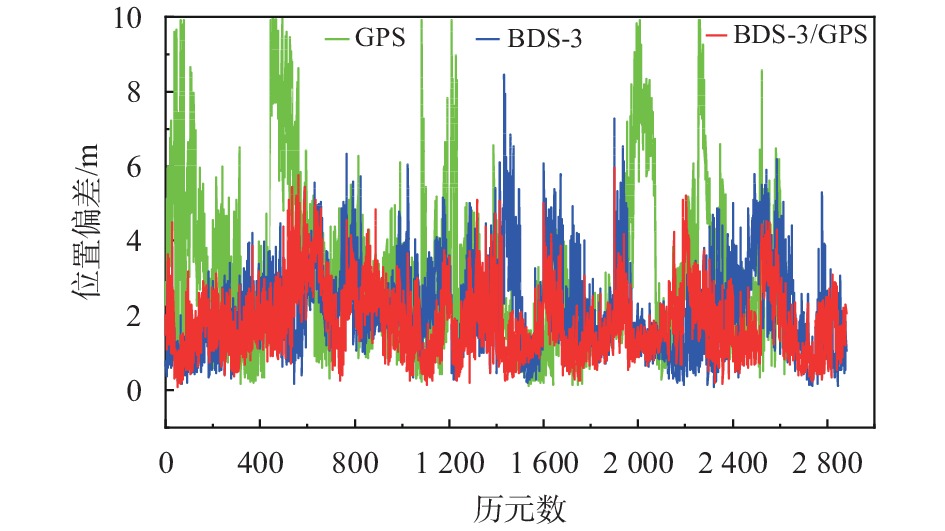
图4~图7为GPS、BDS-3、BDS-3/GPS三种模式下在东(E)、北(N)、天(U)方向上偏差和位置偏差序列图,GPS模式下E、N、U方向上偏差达到5.6 m、3.5 m和12.2 m;BDS-3模式下E、N、U方向上偏差达到2.3 m、2.3 m和8.2 m;BDS-3/GPS组合模式下E、N、U方向上值偏差达到2.0 m、1.5 m和5.7 m,BDS-3/GPS组合定位精度优于BDS-3,BDS-3优于GPS,在位置偏差上BDS-3/GPS的组合定位稳定性和精度同样最高,达到6 m.
为了进一步分析不同遮挡情况下三种模式的定位性能,模拟WUH2测站分别在N、E、S、W四个方向遮挡下严重遮挡、中等遮挡和轻度遮挡等12种情况,分析了可用历元数、可见卫星颗数、GDOP值和位置精度的RMS值如表1所示.
表 1 WUH2站不同遮挡情况定位分析遮挡情况/(°) GPS BDS-3 BDS-3/GPS 历元数 平均卫星颗数 GDOP RMS/m 历元数 平均卫星颗数 GDOP RMS/m 历元数 平均卫星颗数 GDOP RMS/m N40 2643 5.3 6.02 3.79 2880 8.7 4.26 2.47 2880 13.8 2.80 2.07 N60 1663 4.5 8.08 5.87 2880 7.3 5.78 2.72 2880 11.2 3.77 2.19 N80 746 4.2 9.86 6.31 2873 6.0 9.52 5.25 2880 9.0 4.87 2.98 E40 2665 5.0 7.25 4.96 2880 8.3 4.26 2.60 2880 13.2 2.97 2.40 E60 1685 4.4 10.20 7.95 2871 6.3 7.49 3.88 2880 10.2 4.75 3.13 E80 797 4.3 11.27 10.15 2581 5.4 9.41 5.78 2880 8.5 6.24 4.68 S40 2696 5.3 6.10 4.10 2880 7.5 4.28 2.84 2880 12.6 2.78 2.22 S60 2187 4.6 7.65 5.61 2438 5.3 9.57 4.34 2880 9.4 4.36 2.86 S80 1667 4.5 8.43 6.26 1971 4.5 11.02 5.49 2864 8.1 5.68 5.26 W40 2744 5.4 6.43 3.83 2880 7.8 4.13 2.54 2880 13.1 2.82 2.03 W60 2 008 4.5 10.93 7.34 2880 6.1 6.65 3.75 2880 10.3 4.06 2.69 W80 1330 4.4 12.12 8.58 2368 5.1 9.18 5.03 2880 8.6 5.51 5.03 由表1可知,40°N表示北面轻度遮挡,即剔除方位角在270°N~360°N和0°N~90°N范围内,高度角低于40°的卫星后参与解算. 任一方向遮挡情况下,随着遮挡高度的增加,可见卫星颗数减少,GDOP值增加,可用历元数减少,定位精度显著降低. GPS模式在北面和南面遮挡精度较高,位置精度RMS值优于7 m;BDS-3模式的历元利用率和可见卫星颗数较GPS有明显提高,GDOP值下降,位置精度RMS值优于6 m;BDS-3/GPS组合定位模式,大大增加了可见卫星颗数,即使在严重遮挡时,基本能保证8颗以上的可见卫星颗数,可解算历元在遮挡严重时也能达到98%的利用率,在中等遮挡和轻度遮挡趋于100%. 可见卫星颗数严重影响卫星空间几何结构和GDOP值,组合系统随着可见卫星颗数的增加,GDOP值降低,位置精度RMS值优于5.5 m,稳定性和精度都明显优于单系统.
由于篇幅原因,表1~表4列出了在纬度上具有代表性的WUH2、STHL、CUSV和ULAB 4个测站处理结果. 亚太地区的测站能够较完整的接收BDS-3的卫星,而非亚太地区测站由于接收机未及时更新以及测站位置所限制,无法完整接收到BDS-3的GEO与IGSO卫星信号,因此该4个测站的BDS-3模式只有MEO卫星参与解算.
由于GEO与IGSO卫星不可见,非亚太地区的测站BDS-3模式相对于亚太地区测站,可见卫星颗数降低,历元利用率下降,GDOP值上升,定位精度明显下降,但总体上略优于GPS;BDS-3/GPS组合模式相对于BDS-3单系统定位精度显著提高,相对于亚太地区测站BDS-3/GPS组合模式精度略微降低. 因此,遮挡情况下BDS-3的GEO和IGSO卫星促进了定位性能的提高,尤其是BDS-3单系统定位性能显著提高.
表 2 STHL站不同遮挡情况定位分析遮挡情况/(°) GPS BDS-3 BDS-3/GPS 历元数 平均卫星颗数 GDOP RMS/m 历元数 卫星平均数 GDOP RMS/m 历元数 平均卫星颗数 GDOP RMS/m N40 2759 5.8 5.27 3.73 2633 4.8 8.11 3.44 2880 10.5 3.01 2.30 N60 2468 5.1 6.66 5.30 1814 4.2 12.00 4.47 2880 8.9 3.93 3.20 N80 2268 4.7 7.56 6.29 1174 4.0 13.46 5.98 2877 8.1 4.78 3.58 E40 2740 5.6 6.06 4.57 2498 4.7 8.25 3.61 2880 10.1 3.14 2.50 E60 2253 4.7 8.25 7.11 1571 4.2 10.42 3.99 2880 8.1 4.46 4.43 E80 1720 4.4 9.12 8.20 891 4.1 10.48 4.48 2880 7.2 5.16 5.84 S40 2654 5.5 6.67 5.25 2300 4.7 8.09 3.63 2880 9.8 3.07 2.24 S60 1680 4.7 9.56 8.03 831 4.0 11.04 5.90 2839 7.2 4.99 3.45 S80 1165 4.4 9.98 8.59 318 4.0 11.93 8.09 2755 6.4 5.66 4.55 W40 2824 5.6 5.94 3.79 2430 4.7 8.13 3.92 2880 10.1 3.26 2.56 W60 2248 4.7 7.08 5.88 1455 4.2 10.01 4.76 2880 8.0 4.37 3.78 W80 1 971 4.4 7.19 6.32 688 4.0 10.46 5.23 2863 7.2 5.26 5.34 表 3 CUSV站不同遮挡情况定位分析遮挡情况/(°) GPS BDS-3 BDS-3/GPS 历元数 平均卫星颗数 GDOP RMS/m 历元数 卫星平均数 GDOP RMS/m 历元数 平均卫星颗数 GDOP RMS/m N40 2690 5.3 7.15 5.61 2880 8.9 3.63 1.96 2880 14.1 2.48 1.66 N60 1858 4.6 9.40 6.73 2880 7.1 5.88 2.31 2880 11.2 3.76 2.09 N80 1287 4.3 9.02 6.05 2849 6.4 7.03 2.65 2880 9.9 4.14 2.34 E40 2689 5.5 6.50 4.82 2880 8.8 3.07 1.82 2880 14.2 2.27 1.79 E60 2087 4.8 8.21 7.44 2779 6.3 5.58 2.72 2880 10.6 3.39 2.52 E80 1615 4.6 8.33 7.18 2655 5.3 7.38 3.32 2880 9.1 3.90 3.20 S40 2801 5.7 5.93 3.36 2880 8.8 3.76 2.01 2880 14.4 2.50 1.86 S60 2517 4.9 7.71 4.78 2866 6.5 6.78 2.59 2880 11.2 3.47 2.10 S80 2199 4.7 8.40 6.33 2438 5.2 10.34 4.00 2880 9.3 4.39 2.62 W40 2610 5.6 5.99 3.78 2880 8.9 3.91 2.01 2880 14.3 2.54 1.70 W60 1 999 4.9 7.29 5.96 2880 7.4 4.68 2.20 2880 11.8 3.03 1.91 W80 1764 4.5 7.96 8.03 2823 6.2 6.05 2.79 2880 10.0 3.57 2.10 由表3可知,CUSV测站GPS模式南面遮挡的稳定性和精度最高,优于6.5 m,而BDS-3和BDS-3/GPS组合模式各方向遮挡精度相当,并无明显差异;WUH2测站GPS模式北面与南面遮挡精度较高,优于6.5 m,BDS-3模式北面遮挡的精度略优于其他方向遮挡的精度,优于5.5 m,BDS-3/GPS组合模式北面遮挡的精度略优于其他方向遮挡的精度,优于3 m;ULAB测站GPS、BDS-3、BDS-3/GPS三种模式下,北面遮挡的定位精度都明显优于其他方向遮挡的精度,GPS优于6 m,BDS-3优于4 m,BDS-3/GPS组合优于3 m. PIMO、GUAM站的结论与CUSV类似,WARN、FFMJ的数据与ULAB站的结论类似,因此在北半球区域,相较于其他方向遮挡,GPS模式下在低纬度地区GPS模式下南面遮挡的精度较高,随着纬度的升高,北面遮挡的精度逐渐提高,在中高纬度地区,北面遮挡精度最高;BDS-3模式和BDS-3/GPS模式,在低纬度地区各方向遮挡精度相当,在中纬度和中高纬度地区,北面遮挡的精度明显优于其他方向遮挡精度.
表 4 ULAB站不同遮挡情况定位分析遮挡情况/(°) GPS BDS-3 BDS-3/GPS 历元数 平均卫星颗数 GDOP RMS/m 历元数 卫星颗数 GDOP RMS/m 历元数 平均卫星颗数 GDOP RMS/m N40 2710 5.4 6.20 3.82 2880 8.3 4.18 2.75 2879 13.6 2.77 2.31 N60 2103 4.7 7.86 5.51 2880 7.5 5.39 3.39 2879 11.7 3.62 2.54 N80 1497 4.4 7.64 5.88 2867 6.6 6.77 3.88 2879 10.2 4.11 2.67 E40 2652 5.5 5.73 4.00 2880 7.1 5.23 2.86 2879 12.4 2.80 2.04 E60 2255 4.8 8.63 7.94 2852 6.0 7.11 3.78 2878 10.5 4.11 2.77 E80 1556 4.2 11.60 9.65 2315 5.3 9.69 6.22 2827 8.8 5.71 4.20 S40 2654 5.7 5.53 4.12 2829 6.0 5.52 2.70 2880 11.6 2.67 1.93 S60 2248 5.0 8.12 6.70 2446 5.0 8.57 3.89 2880 9.4 4.36 3.66 S80 1585 4.8 8.65 7.39 1380 4.4 11.58 5.22 2803 7.8 6.88 5.48 W40 2860 5.5 5.39 3.22 2880 7.2 5.27 3.98 2880 12.7 2.64 2.30 W60 2242 4.8 9.18 5.96 2804 6.3 6.86 4.76 2880 10.7 3.94 3.06 W80 1445 4.4 12.70 8.91 2517 5.6 8.95 6.45 2880 9.2 5.54 4.31 3. 结束语
本文通过MGEX跟踪站的数据,针对GPS、BDS-3、BDS-3/GPS三种定位模式,在不同遮挡情况下进行伪距单点定位,分析了在不同区域遮挡环境下对定位性能的改善,得到如下结论:
1)在亚太地区,由于BDS-3的GEO和IGSO卫星可见,增加了BDS-3系统的可见卫星颗数,改善了卫星空间几何结构,显著提高BDS-3定位精度,对BDS-3/GPS组合定位精度略微提高;
2) BDS-3/GPS组合定位模式,大大增加了可见卫星颗数,即使在严重遮挡时,基本能保证8颗以上的可见卫星,可解算历元在遮挡严重时也能达到98%的利用率,在中等遮挡和轻度遮挡趋于100%,卫星空间几何结构改善,GDOP值降低,在任一遮挡情况下,组合定位的稳定性和精度,都明显优于单系统;
3) GPS模式下,在低纬度地区,南面遮挡的精度较高,随着纬度的升高,北面遮挡的精度逐渐提高,在中高纬度地区,北面遮挡精度最高. GPS模式在精度最高的遮挡面时,位置精度优于6.5 m;BDS-3模式和BDS-3/GPS组合模式,在低纬度地区各方向遮挡精度相当,在中纬度和中高纬度地区,北面遮挡的精度明显优于其他方向遮挡精度,在精度最高的遮挡面时,BDS-3模式位置精度优于5.5 m,BDS-3/GPS模式位置精度优于3 m.
-
表 1 WUH2站不同遮挡情况定位分析
遮挡情况/(°) GPS BDS-3 BDS-3/GPS 历元数 平均卫星颗数 GDOP RMS/m 历元数 平均卫星颗数 GDOP RMS/m 历元数 平均卫星颗数 GDOP RMS/m N40 2643 5.3 6.02 3.79 2880 8.7 4.26 2.47 2880 13.8 2.80 2.07 N60 1663 4.5 8.08 5.87 2880 7.3 5.78 2.72 2880 11.2 3.77 2.19 N80 746 4.2 9.86 6.31 2873 6.0 9.52 5.25 2880 9.0 4.87 2.98 E40 2665 5.0 7.25 4.96 2880 8.3 4.26 2.60 2880 13.2 2.97 2.40 E60 1685 4.4 10.20 7.95 2871 6.3 7.49 3.88 2880 10.2 4.75 3.13 E80 797 4.3 11.27 10.15 2581 5.4 9.41 5.78 2880 8.5 6.24 4.68 S40 2696 5.3 6.10 4.10 2880 7.5 4.28 2.84 2880 12.6 2.78 2.22 S60 2187 4.6 7.65 5.61 2438 5.3 9.57 4.34 2880 9.4 4.36 2.86 S80 1667 4.5 8.43 6.26 1971 4.5 11.02 5.49 2864 8.1 5.68 5.26 W40 2744 5.4 6.43 3.83 2880 7.8 4.13 2.54 2880 13.1 2.82 2.03 W60 2 008 4.5 10.93 7.34 2880 6.1 6.65 3.75 2880 10.3 4.06 2.69 W80 1330 4.4 12.12 8.58 2368 5.1 9.18 5.03 2880 8.6 5.51 5.03  下载: 导出CSV
下载: 导出CSV
表 2 STHL站不同遮挡情况定位分析
遮挡情况/(°) GPS BDS-3 BDS-3/GPS 历元数 平均卫星颗数 GDOP RMS/m 历元数 卫星平均数 GDOP RMS/m 历元数 平均卫星颗数 GDOP RMS/m N40 2759 5.8 5.27 3.73 2633 4.8 8.11 3.44 2880 10.5 3.01 2.30 N60 2468 5.1 6.66 5.30 1814 4.2 12.00 4.47 2880 8.9 3.93 3.20 N80 2268 4.7 7.56 6.29 1174 4.0 13.46 5.98 2877 8.1 4.78 3.58 E40 2740 5.6 6.06 4.57 2498 4.7 8.25 3.61 2880 10.1 3.14 2.50 E60 2253 4.7 8.25 7.11 1571 4.2 10.42 3.99 2880 8.1 4.46 4.43 E80 1720 4.4 9.12 8.20 891 4.1 10.48 4.48 2880 7.2 5.16 5.84 S40 2654 5.5 6.67 5.25 2300 4.7 8.09 3.63 2880 9.8 3.07 2.24 S60 1680 4.7 9.56 8.03 831 4.0 11.04 5.90 2839 7.2 4.99 3.45 S80 1165 4.4 9.98 8.59 318 4.0 11.93 8.09 2755 6.4 5.66 4.55 W40 2824 5.6 5.94 3.79 2430 4.7 8.13 3.92 2880 10.1 3.26 2.56 W60 2248 4.7 7.08 5.88 1455 4.2 10.01 4.76 2880 8.0 4.37 3.78 W80 1 971 4.4 7.19 6.32 688 4.0 10.46 5.23 2863 7.2 5.26 5.34
下载: 导出CSV
表 3 CUSV站不同遮挡情况定位分析
遮挡情况/(°) GPS BDS-3 BDS-3/GPS 历元数 平均卫星颗数 GDOP RMS/m 历元数 卫星平均数 GDOP RMS/m 历元数 平均卫星颗数 GDOP RMS/m N40 2690 5.3 7.15 5.61 2880 8.9 3.63 1.96 2880 14.1 2.48 1.66 N60 1858 4.6 9.40 6.73 2880 7.1 5.88 2.31 2880 11.2 3.76 2.09 N80 1287 4.3 9.02 6.05 2849 6.4 7.03 2.65 2880 9.9 4.14 2.34 E40 2689 5.5 6.50 4.82 2880 8.8 3.07 1.82 2880 14.2 2.27 1.79 E60 2087 4.8 8.21 7.44 2779 6.3 5.58 2.72 2880 10.6 3.39 2.52 E80 1615 4.6 8.33 7.18 2655 5.3 7.38 3.32 2880 9.1 3.90 3.20 S40 2801 5.7 5.93 3.36 2880 8.8 3.76 2.01 2880 14.4 2.50 1.86 S60 2517 4.9 7.71 4.78 2866 6.5 6.78 2.59 2880 11.2 3.47 2.10 S80 2199 4.7 8.40 6.33 2438 5.2 10.34 4.00 2880 9.3 4.39 2.62 W40 2610 5.6 5.99 3.78 2880 8.9 3.91 2.01 2880 14.3 2.54 1.70 W60 1 999 4.9 7.29 5.96 2880 7.4 4.68 2.20 2880 11.8 3.03 1.91 W80 1764 4.5 7.96 8.03 2823 6.2 6.05 2.79 2880 10.0 3.57 2.10
下载: 导出CSV
表 4 ULAB站不同遮挡情况定位分析
遮挡情况/(°) GPS BDS-3 BDS-3/GPS 历元数 平均卫星颗数 GDOP RMS/m 历元数 卫星颗数 GDOP RMS/m 历元数 平均卫星颗数 GDOP RMS/m N40 2710 5.4 6.20 3.82 2880 8.3 4.18 2.75 2879 13.6 2.77 2.31 N60 2103 4.7 7.86 5.51 2880 7.5 5.39 3.39 2879 11.7 3.62 2.54 N80 1497 4.4 7.64 5.88 2867 6.6 6.77 3.88 2879 10.2 4.11 2.67 E40 2652 5.5 5.73 4.00 2880 7.1 5.23 2.86 2879 12.4 2.80 2.04 E60 2255 4.8 8.63 7.94 2852 6.0 7.11 3.78 2878 10.5 4.11 2.77 E80 1556 4.2 11.60 9.65 2315 5.3 9.69 6.22 2827 8.8 5.71 4.20 S40 2654 5.7 5.53 4.12 2829 6.0 5.52 2.70 2880 11.6 2.67 1.93 S60 2248 5.0 8.12 6.70 2446 5.0 8.57 3.89 2880 9.4 4.36 3.66 S80 1585 4.8 8.65 7.39 1380 4.4 11.58 5.22 2803 7.8 6.88 5.48 W40 2860 5.5 5.39 3.22 2880 7.2 5.27 3.98 2880 12.7 2.64 2.30 W60 2242 4.8 9.18 5.96 2804 6.3 6.86 4.76 2880 10.7 3.94 3.06 W80 1445 4.4 12.70 8.91 2517 5.6 8.95 6.45 2880 9.2 5.54 4.31
下载: 导出CSV
-
[1] 布金伟, 左小清, 金立新, 等. BDS/QZSS及其组合系统在中国和日本及周边地区的定位性能评估[J]. 武汉大学学报(信息科学版), 2020, 45(4): 574-585, 611. [2] CAI C S, GAO Y, PAN L, et al. An analysis on combined GPS/COMPASS data quality and its effect on single point positioning accuracy under different observing conditions[J]. Advances in space research, 2014, 54(5): 818-829. DOI: 10.1016/j.asr.2013.02.019
[3] 杨元喜. 北斗卫星导航系统的进展、贡献与挑战[J]. 测绘学报, 2010, 39(1): 1-6. [4] 方欣颀, 范磊. BDS-2/BDS-3伪距单点定位精度分析[J]. 全球定位系统, 2020, 45(1): 19-25. [5] 杨武召, 阮仁桂, 孙中苗, 等. BDS-3伪距定位精度分析[C]//第十届中国卫星导航年会, 2019. [6] 杨元喜, 许扬胤, 李金龙, 等. 北斗三号系统进展及性能预测—试验验证数据分析[J]. 中国科学(地球科学), 2018, 48(5): 584-594. [7] 余晓娜, 王超, 左小清, 等. 不同截止高度角下BDS/GPS/GALILEO多模组合SPP解算性能分析[J]. 全球定位系统, 2018, 43(5): 91-97, 111. [8] 徐宁辉, 陆杰, 梁月吉. 单系统伪距单点定位在不同地区的精度分析[J]. 全球定位系统, 2019, 44(5): 77-84. [9] 景一帆, 杨元喜, 曾安敏, 等. 北斗区域卫星导航系统定位性能的纬度效应[J]. 武汉大学学报(信息科学版), 2017, 42(9): 1243-1248. [10] 唐卫明, 徐坤, 金蕾, 等. 北斗/GPS组合伪距单点定位性能测试和分析[J]. 武汉大学学报(信息科学版), 2015, 40(4): 529-533. [11] 张乾坤, 刘小生, 何琦敏. BDS-3多频点伪距单点定位性能研究[J]. 测绘通报, 2020(1): 71-75. [12] 崔立鲁, 杜石, 余寒, 等. BDS/GPS组合伪距单点定位性能分析与评价[J]. 测绘工程, 2019, 28(2): 13-16, 21. [13] 北斗卫星导航系统空间信号接口控制文件-公开服务信号B1I(3.0 版)[R]. 北京: 中国卫星导航系统管理办公室, 2019. [14] 王涛. GPS/GLONASS/BDS多模融合伪距单点定位模型精度分析[J]. 全球定位系统, 2017, 42(3): 32-37. [15] 张强, 赵齐乐, 章红平, 等. 北斗卫星导航系统Klobuchar模型精度评估[J]. 武汉大学学报(信息科学版), 2014, 39(2): 142-146. [16] 周仁宇, 胡志刚, 苏牡丹, 等. 北斗全球系统广播电离层模型性能初步评估[J]. 武汉大学学报(信息科学版), 2019, 44(10): 1457-1464. [17] TEUNISSEN P J G, MONTENBRUCK O. Springer Handbook of Global Navigation Satellite Systems[M]. Earth Science and Geography, 2017.
-
期刊类型引用(6)
1. 曹翔,史誉州,刘雅奇,赵仓龙,刘涛. 北斗三号/GPS组合导航系统全球定位性能分析. 珠江水运. 2024(04): 24-29 .  百度学术
百度学术
2. 吴坤泽,蒋猛,高梦飞,廖玉祥. 基于两种电离层解算策略BDS-3双频超长基线相对定位. 测绘与空间地理信息. 2023(07): 125-127+130+134 . 百度学术
3. 孙国辉,罗军,吴彬彬. 随机模型对BDS/GPS伪距单点定位精度影响分析. 测绘与空间地理信息. 2023(09): 100-102 . 百度学术
4. 赵青芬,赵青芳. BDS混合星座两两组合单点定位研究. 测绘与空间地理信息. 2023(12): 83-85+89 . 百度学术
5. 罗元,苏本磊. 改正通道延迟的GLONASS/BDS组合伪距定位. 全球定位系统. 2022(01): 86-92 . 本站查看
6. 柳明. B1C/G-L1/E1两两紧组合相对定位. 测绘与空间地理信息. 2022(08): 130-132+136+139 . 百度学术
其他类型引用(3)






























计量
- 文章访问数: 941
- HTML全文浏览量: 334
- PDF下载量: 93
- 被引次数: 9
