
BDS application of offshore UUV path tracking
-
摘要: 针对无人水下航行器(UUV)沿给定路径航行时会出现各种偏差的问题,设计了一款运用高性能STM32单片机与UM220-Ⅳ N定位模块搭建的导航定位分系统. 将其应用于UUV特定的路径跟踪方面,通过单片机将北斗定位模块采集到的UUV位置坐标、航速航向等数据发送到上位机,上位机将其与给定跟踪路径数据进行对比,计算路径偏差并通过单片机控制UUV的驱动模块改变UUV运动方向,实现对给定路径的精确跟踪. 同时通过无线通讯模块,将UUV路径轨迹及采集的水质信息实时显示在岸基监控系统上位机软机界面. 水下实验表明,UUV路径跟踪精度明显提高,为纠正UUV路径跟踪偏差提供了一种参考方法.
-
关键词:
- 无人水下航行器(UUV) /
- 北斗卫星导航系统(BDS) /
- 路径跟踪 /
- STM32单片机
Abstract: In order to solve the problem of various deviations when unmanned underwater vehicle (UUV) navigates along a given path. A system combining STM32 and UM220-IV N module based on Beidou Navigation Satelite System (BDS) is designed and applied to the specific path tracking of unmanned underwater vehicle. The position coordinates, velocity and direction data of UUV collected by the BDS positioning module are sent to the upper computer through the single-chip microcomputer module. The upper computer compares the data with the given tracking path data, calculates the path deviation, and controls the UUV driving module to change the UUV motion direction, so as to achieve accurate tracking of the given path. At the same time, through the wireless communication module, the water quality information collected by the UUV path track and information acquisition module can be displayed on the upper computer interface of the shore based monitoring system in real time. The underwater experiments show that the accuracy of UUV path tracking is significantly improved, which provides a reference method for correcting the path tracking error of UUV. -
0. 引 言
随着近年我国提出建设海洋强国的战略,可用于海洋水质检测及海平面测绘的无人水下航行器(UUV)得到了快速发展. UUV是一种可在水下运动,具有视觉和感知系统,通过遥控操作方式,配备机械手代替或辅助人工完成水下作业任务的机电装置[1]. 先进的UUV离不开先进的导航控制系统.
北斗卫星导航系统(BDS),是我国基于国家安全和经济社会发展自主研发的全球卫星导航系统,是为全球用户提供全天候、全天时、高精度、高可靠的定位、导航和授时服务的国家重要时空基础设施,继美国的GPS,俄罗斯的GLONASS之后,第三个成熟的卫星导航系统[2]. BDS作为后起之秀,不仅拥有其他导航系统的所具有的功能,而且还拥有其他导航系统不具有的双向短报文通信功能[3]. 2020年BDS完成了全球组网使其在交通运输业、农业、渔业及防灾减灾方面得到了广泛应用. 例如姜少杰等[4]提出了一种BDS/GPS双模组合定位的水下机器人高精度导航定位系统,并通过设置单模定位系统作为双模定位系统的对比方案研究双模系统的性能,通过对实验数据的滤波处理得出双模定位系统比单模定位系统性能优越的结论. 崔秀芳等[5]为解决渔船遇险搜救难题,提出了运用BDS监控远洋渔船的方法,利用BDS系统监控范围广,稳定性好及独有的双向短报文通信优势,实现了对远洋渔船的实时监管及海上突发事件的及时救援.
无线信号很难抵达深海区域,所以BDS在UUV上的应用较少. 研究结果表明,当UUV工作在近海水深小于300 m海域时,无线电导航和卫星导航技术均可正常使用[6]. 本文将BDS应用在近海UUV路径跟踪方面,通过UUV定位终端接收BDS定位数据,STM32单片机模块接收并处理UUV位置数据并通过无线通讯模块将数据发送给上位机,上位机接收、储存并比较UUV实际路径数据与给定路径数据偏差,并向STM32模块下达控制指令控制UUV驱动模块改变UUV的航向,实现精确的路径跟踪.
1. UUV系统及结构设计
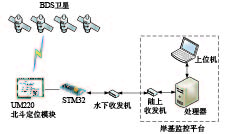
UUV是一个复杂的无人潜航系统,通常由驱动系统、控制系统(STM32作为主控芯片)、导航定位系统、无线通讯系统、信息采集系统及载体等组成[7]. 本文建立的UUV主要包括:1对42BYGH直流无刷电机(通过电机转速差实现转向)、水平方向舵(STM32控制舵机转角实现浮潜)、双叶螺旋桨、KXD-48-V-80 AH动力锂电池、40 A双向无刷电调组成的驱动系统;岸基监控平台(主要为上位机,PC机组成)、工控机(STM32为主控制器)、直流稳压模块组成的控制系统;导航定位系统包括:MPU6000电子陀螺仪和UM220-Ⅳ N 北斗定位模块. 无线通讯系统主要为RS485串口、5G通讯及北斗短报文通讯模块. 信息采集系统包括:PCI8601数据采集卡、图像采集模块、温盐深仪(CTD)及定点测绘模块等. 载体选择一体化铝合金耐压机身(便于密封防水). 图1为UUV硬件系统结构.
2. BDS在UUV上的应用
2.1 BDS定位系统原理
UUV在不同深度水域航行时,采用不同的导航定位方式,当工作水域深度小于300 m时,可以使用BDS或其他无线电导航技术.
对近海UUV进行准确定位,需要测量4颗已知坐标的BDS卫星到UUV 北斗定位模块之间的距离. 卫星到定位模块的距离可由真空中的光速乘以卫星信号传播到定位模块接收机的时间得到. 假设UUV坐标
$\left( {{x_0},{y_0},{z_0}} \right)$ 为未知参数,已知空间卫星端卫星的瞬时坐标为$\left( {{x_i},{y_i},{z_i}} \right)$ ,其中$i = 1,2,3,4$ (可由卫星星历,卫星钟校正参数等数据计算出),以已知卫星坐标为圆心,卫星坐标到UUV坐标的距离为半径,采用三维空间交会的方法计算UUV三维空间坐标,解方程组就得到定位模块接收机坐标,计算公式如下:$$\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!D_1\!=\!\sqrt {{{\left( {{x_1} - {x_0}} \right)}^2} + {{\left( {{y_1} - {y_0}} \right)}^2} + {{\left( {{z_1} - {z_0}} \right)}^2}} + c\left( {{V_{t_1}} - {V_{t_0}}} \right),$$ (1) $$\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!{D_2}=\sqrt {{{\left( {{x_2} - {x_0}} \right)}^2} + {{\left( {{y_2} - {y_0}} \right)}^2} + {{\left( {{z_2} - {z_0}} \right)}^2}} + c\left( {{V_{t_2}} - {V_{t_0}}} \right) ,$$ (2) $$\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!{D_3}=\sqrt {{{\left( {{x_3} - {x_0}} \right)}^2} + {{\left( {{y_3} - {y_0}} \right)}^2} + {{\left( {{z_3} - {z_0}} \right)}^2}} + c\left( {{V_{t_3}} - {V_{t_0}}} \right) ,$$ (3) $$\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!{D_4}=\sqrt {{{\left( {{x_4} - {x_0}} \right)}^2} + {{\left( {{y_4} - {y_0}} \right)}^2} + {{\left( {{z_4} - {z_0}} \right)}^2}} + c\left( {{V_{t_4}} - {V_{t_0}}} \right) ,$$ (4) $${D_i} = c\Delta {t_i},\left( {i = 1,2,3,4} \right).$$ (5) 式中:
${D_i}$ 为卫星到定位模块观测的距离;$c$ 为真空中的光速;$\Delta {t_i}$ 为卫星信号到接收机的时间;${V_{t_0}}$ 为接收机时钟差;${V_{t_i}}$ 即卫星时钟差,由卫星星历得出.联立上述方程,便可求出UUV的空间坐标
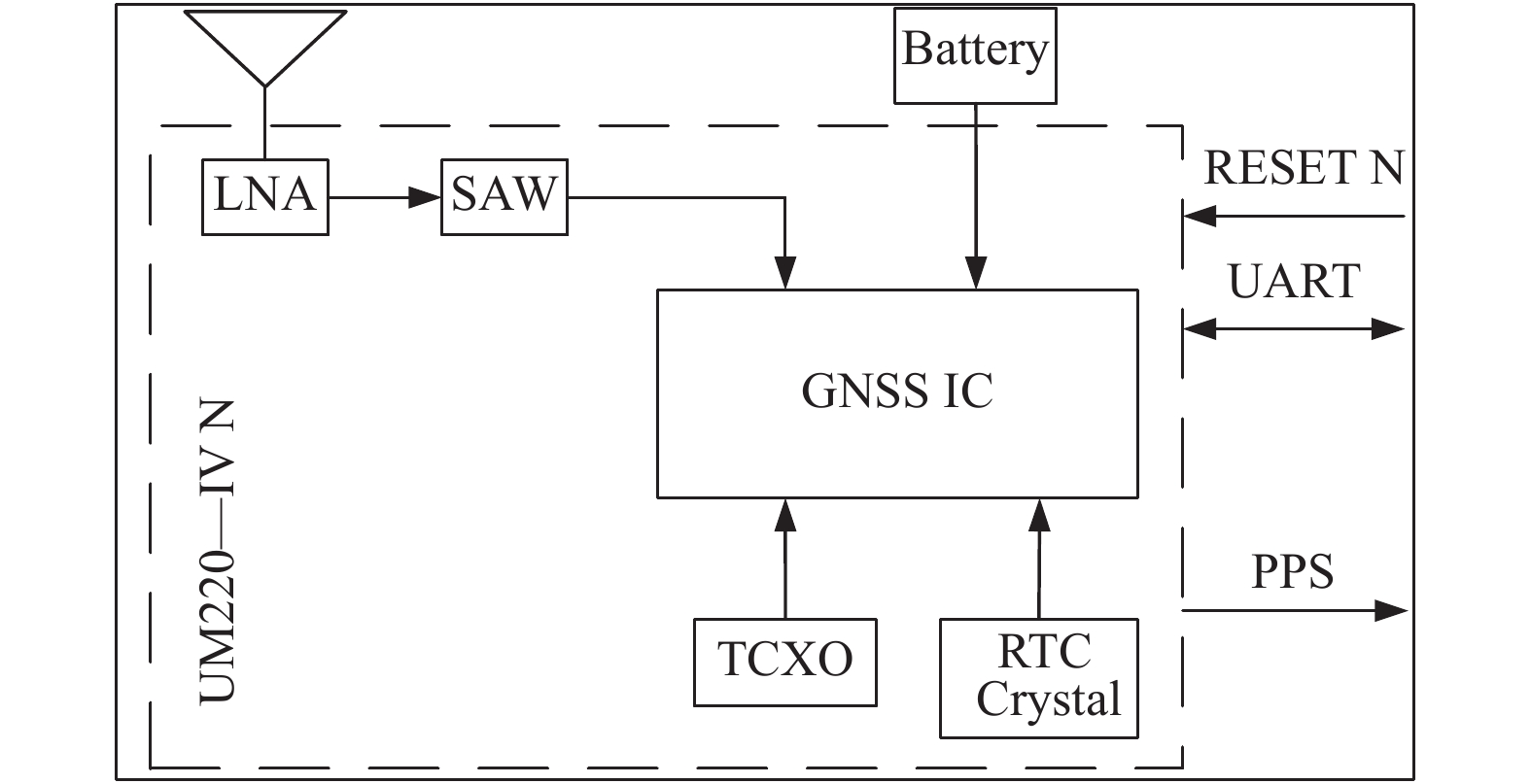
$\left( {{x_0},{y_0},{z_0}} \right)$ 及接收装置的时钟差. 图2为BDS定位系统框图.2.2 定位系统模型
当UUV在近海海域航行时,为便于研究定位系统模型,可以将UUV的运动看作是在二维平面xoy上的运动,因此其从
$E({x_1},{y_1})$ 点运动到$F({x_2},{y_2})$ 点的运动模型为$$ \left\{ \begin{array}{l}S={V}_{0} \cdot \Delta t\\ {x}_{2}={x}_{1}+S \cdot \mathrm{cos}\theta \\ {y}_{2}={y}_{1}+S \cdot \mathrm{sin}\theta \end{array} \right..$$ (6) 式中:
${V_0}$ 为UUV的初速度;$\theta $ 为初始方位角;$S$ 为$E({x_1},{y_1})$ 至$F({x_2},{y_2})$ 点的距离;$E({x_1},{y_1})$ 点为UUV的初始位置,可以由北斗定位模块测出;UUV从$E({x_1},{y_1})$ 点运动到$F({x_2},{y_2})$ 点时北斗定位模块可测出此时$F({x_2},{y_2})$ 点的相对位置. 同时$F({x_2},{y_2})$ 点的相对位置也可以由运动模型推断得出. 两个数据通过相互修正得到UUV的具体位置,提高了UUV的整体定位精度.3. 导航定位分系统的设计
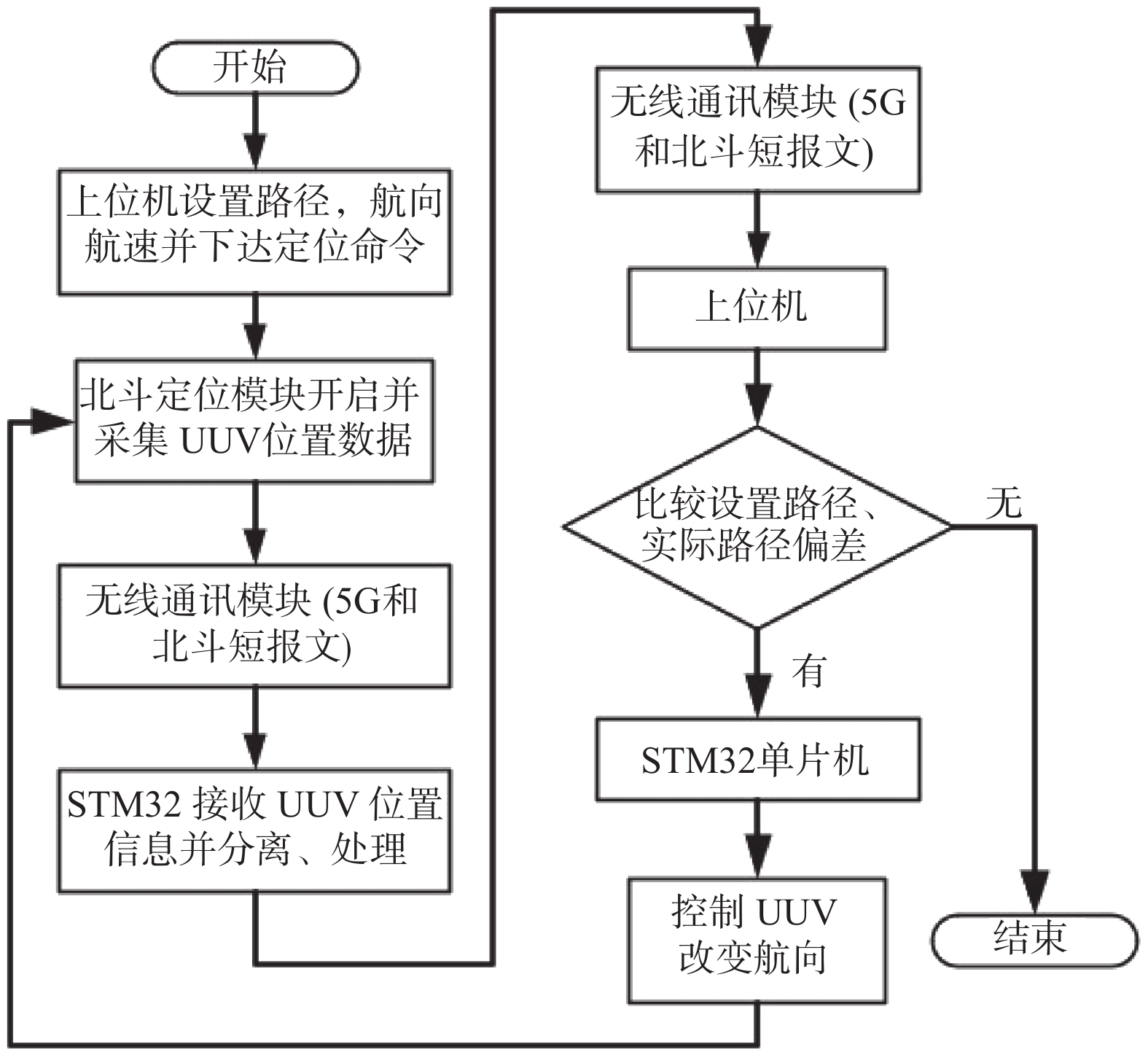
导航定位分系统采用模块化设计,包括单片机模块,北斗定位模块,无线通讯模块和PC上位机[8]. 当UUV运行时,上位机向北斗定位模块下达接受定位数据的命令,此时北斗定位模块开启,接收来自BDS的导航信号,实现定位后将数据发送给STM32单片机,STM32单片机通过算法解析、中值滤波及卡尔曼滤波处理得出UUV精确的位置坐标、航行轨迹、航速航向等数据并通过无线通讯模块将数据发送给上位机,上位机存储UUV位置数据并在界面上显示. 上位机模块将UUV实际运动轨迹与给定路径进行对比,如果出现路径偏差,上位机经过算法计算将控制命令下达给STM32单片机,STM32接受命令并解析后下达指令给UUV驱动模块,通过改变UUV双电机转速差及舵机舵角控制UUV沿给定路径运动至特定区域,待UUV到达目的地后,打开信息采集模块及定点测绘模块,采集水样并得出水温、盐度、PH值等数据并记录采样点位置坐标,并将采集到的数据发送到STM32单片机. 单片机经过数据处理后,再发送给上位机记录和保存. 完成一次海水取样及测绘任务后巡航至下一测绘点. 图3为基于导航定位分系统的UUV工作流程图.
3.1 单片机模块
作为UUV控制系统的核心. 单片机负责接收北斗定位模块传输的$BDGGA格式数据,并对数据进行算法解析,采用中值滤波消除数据噪声,卡尔曼滤波使输出的定位数据变得更加平滑[9]. 并将解析后的数据通过无线通讯模块传送给上位机. 本文选用高性能STM32单片机,该芯片采用Cortex-M4内核,180 M主频CPU,具有256 K的SRAM,支持SDRAM, 包含140个GPI口,引脚为176 pin,拥有更快的A/D转换速度和更低的ADC/DAC工作电压[10]. 高性能STM32单片机作为主控制器,一方面接收信息采集模块采集的测绘图像及水质参数等信息,并对数据进行解读、分析、滤波处理后发送到岸上监控系统上位机显示界面显示并存储;另一方面接收UM220-Ⅳ N定位模块采集到的UUV实时位置,航向航速等信息. 通过数据处理后经无线通讯模块发送给上位机,上位机将其与跟踪路径比较进而控制UUV沿跟踪路径航行.
3.2 北斗定位模块
北斗定位模块是UUV导航定位分系统的核心,它的优劣决定了UUV能否实现精确的路径跟踪,本文选用北京和芯星通科技有限公司研发的UM220第四代产品UM220-Ⅳ N定位模块,该模块主要针对车辆监控、手持终端以及船舶定位开发的BDS/GPS双模定位模块,采用了低功耗抗干扰GNSS SoC芯片UC6226,主要特征如下:
1)集成度高,功耗低(53 mw), 尺寸小(16 mm×12.2 mm×2.4 mm),抗干扰能力强,可以在复杂电磁场环境下工作;采用24引脚,SMD表面贴装封装技术,极大地方便了生产;
2)UM220-Ⅳ N模块可以满足BDS和GPS单系统导航定位,同时可以进行BDS/GPS双模块联合导航定位,可直接输出NMEA数据不需要外接CPU;
3)BDS系统亚太地区定位精度为10 m,速度精度为0.2 m/s,授时精度达10 ns. BDS/GPS双模块水平定位精度为2.5 m CEP,速度精度为0.1m/s. 模块冷启动需30 s,热启动1 s. 工作温度−40 ℃~+85 ℃,存储温度−45 ℃~+90 ℃,可在极端气候环境下使用.
4)UM220-Ⅳ N定位模块中BDS和GPS模块灵敏度对照如表1.
表 1 BDS和GPS灵敏度对照dBm 模块 冷启动 热启动 跟踪 重捕 BDS −146 −149 −160 −149 GPS −148 −150 −160 −149 选择UM220第四代产品UM220-Ⅳ N定位模块,可实现复杂环境中对UUV的高精度定位,该定位模块可方便的与STM32单片机进行信息传输,也可以连接PC机,运用软件实现定位功能. 图4为UM220-Ⅳ N定位模块结构框图.
3.3 无线通讯模块
无线通讯模块是UUV信息传递的中介,对整个UUV的导航定位及控制至关重要. 本文中无线通讯模块采用RS485串口电路,5G通讯模块及北斗短报文模块协同作用,实现BDS卫星端、船载定位终端及地面控制端之间数据信息的双向交换. RS485串口相较于工业广泛运用的RS232串口数据传输速率更高(达到10 Mbps), 传输距离更远(达到3 000 m),采用平衡驱动器和差分接收器的组合,抗噪声干扰性好. 满足多数工业中信息的传输. 5G通信技术是目前移动通信技术发展的最高峰,其具有高速(最高可达10 Gbit/s)、低功耗、低延时性能,是目前以及未来时间段内工业无线数据传输的主流. UUV在近海活动中,当海上环境剧烈变化,无线通讯难以保证时,北斗定位系统所独有的双向短报文通信就可发挥作用.
北斗短报文通信模块选用北京国翼恒达导航科技公司的GYM2003B,模块采用振芯科技GM4660芯片组研制,通过北斗短报文收发信号的低噪声放大、功率放大、上下变频和基带处理,实现北斗短报文收发及有源定位功能[11]. 模块集成了BDS卫星无线电定位系统(RDSS)射频收发芯片,基带电路,功放芯片等,具有BDS RDSS导航定位、短报文通信及卫星授时等功能.
北斗短报文工作过程是发送方将包含接收方ID和通讯内容的通讯申请信号加密后通过卫星转发至地面中心站,地面中心站接收到通讯申请信号后,经脱密和再次加密后加入持续广播的出站广播电文中,经卫星广播给用户,用户接收机接收出站信号,解调解密出站电文,完成一次通讯[12].
3.4 上位机模块
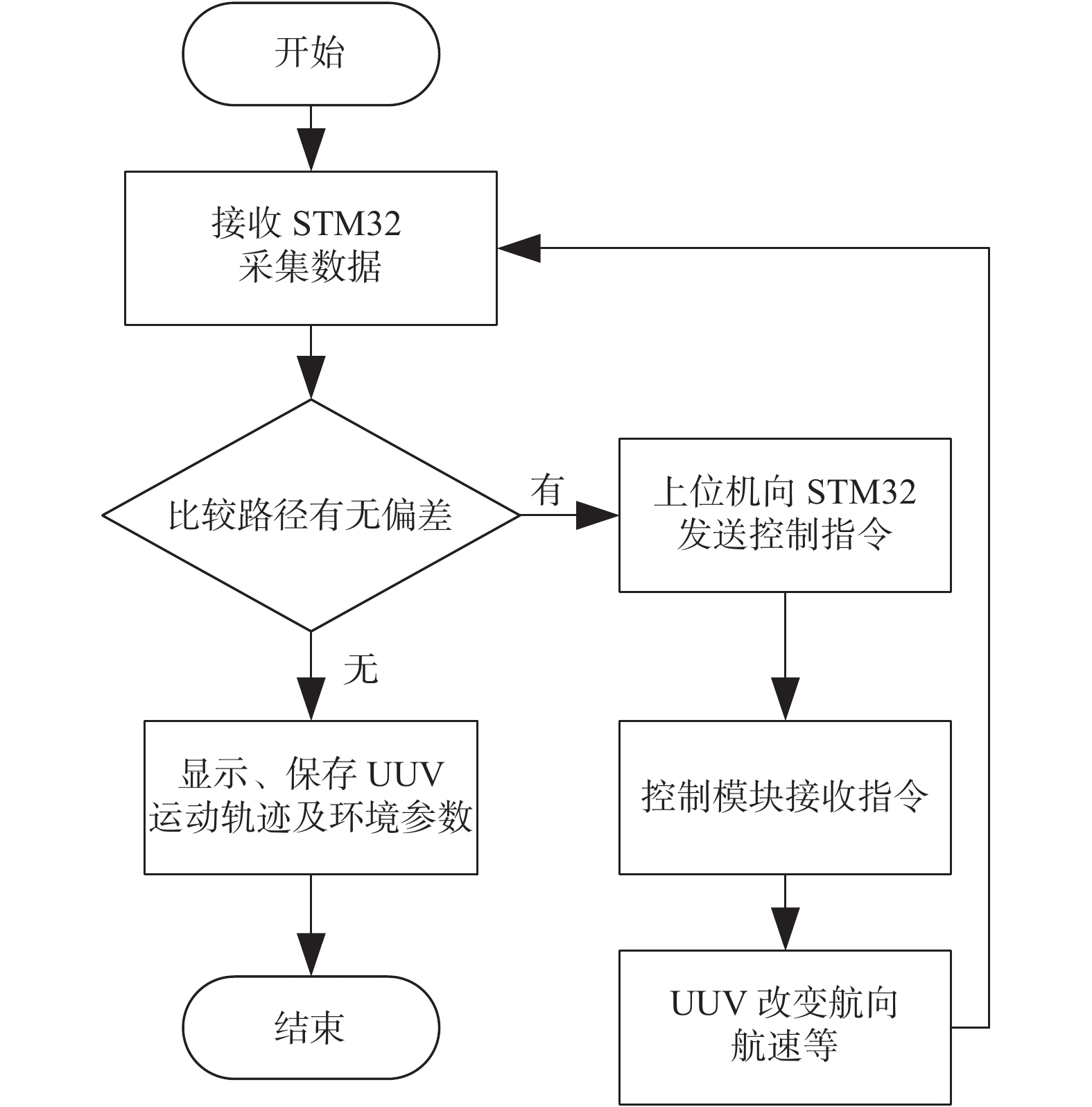
上位机模块主要对UUV采集到的环境数据进行接收、显示和存储,同时监控UUV路径轨迹的变化. 并根据UUV实际运动情况发送相应的控制指令,上位机软件界面使用Visual C++开发. 可方便实现二次开发. 船载北斗定位模块将接收到的BDS定位数据通过无线通讯模块发送给STM32单片机,单片机将数据滤波处理后发送给上位机显示界面,上位机对数据进行读取,显示及存储. 上位机的功能主要有信息显示、远程监控以及动态预警等. 图5为上位机工作流程.
4. 水下测试及分析
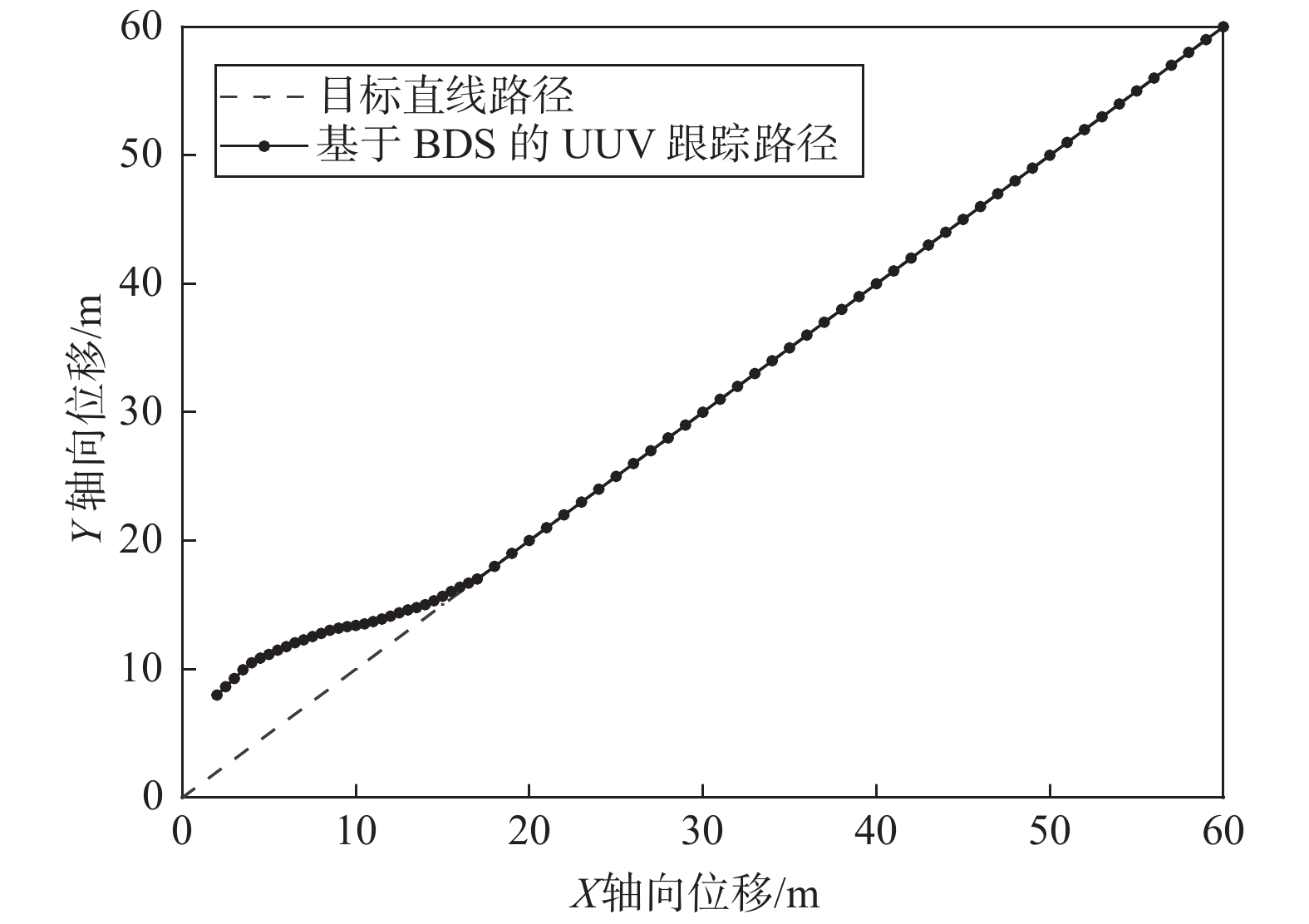
在建立了UUV模型及北斗定位分系统后,对UUV以恒定速度跟踪目标路径进行水下实验,将UUV外形简化为一个总长0.85 m、宽0.50 m、高0.24 m的均质方体,假定其重心与浮心重合. 为了验证UUV路径跟踪情况,将UUV实际路径起点与目标直线路径起点取不同坐标位置,给定UUV初始状态:初始位置坐标(2,8),初始航向角45°. 初始速度0.5 m/s,水域流速为0.1 m/s,目标路径为坐标(0,0)~(60,60)的直线,目标航向角45°. UUV开启后,上位机软件向其发送目标路径轨迹,UUV在北斗定位模块的作用下向目标路径靠近,在坐标点(18,18)处与目标路径重合. 图6为UUV的路径跟踪实验曲线图.
上位机显示界面在UUV运行过程中记录多处UUV经纬度坐标与目标路径经纬度坐标,如表2所示,通过实验可知,UUV在初始阶段距离目标路径较远,但在BDS及上位机、单片机的共同作用下,UUV不断向目标路径靠近,并最终沿着目标路径运动,在路径终点采集水质信息并运动到下一采集点. 导航定位分系统运行状况良好,并能及时修复路径偏差. 提高了近海UUV的路径跟踪的精度.
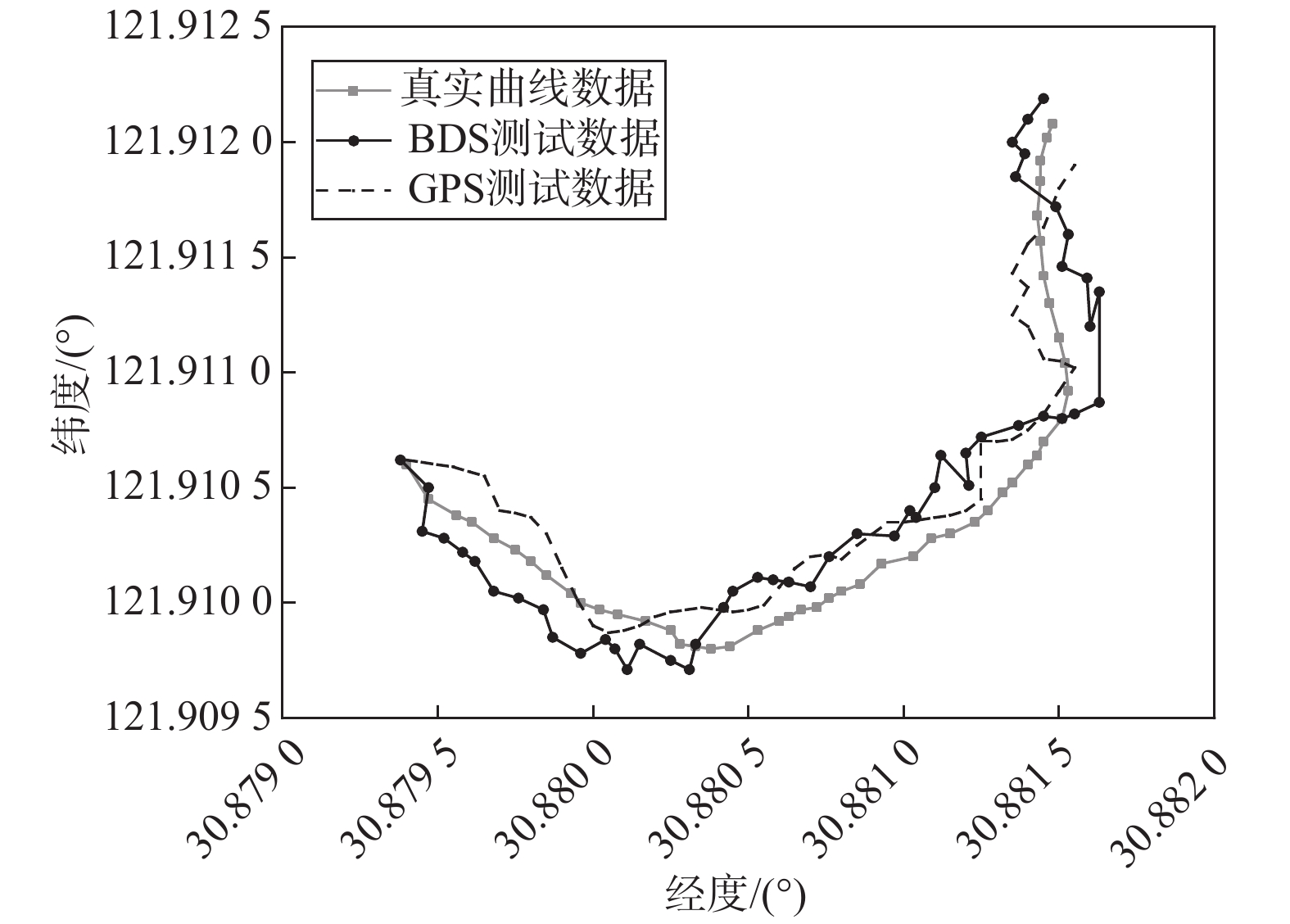
表 2 UUV目标位置与实际位置经纬度对照监测点 实际位置/(°) 目标位置/(°) 速度/(m/s) 1 30.879 8N, 121.910 1E 30.879 8N, 121.910 1E 0.5 2 30.880 6N, 121.909 9E 30.880 5N, 121.909 6E 0.5 3 30.881 4N, 121.910 5E 30.881 4N, 121.910 4E 0.5 UM220-Ⅳ N定位模块不仅适用于BDS导航系统也可用于GPS导航系统,为了验证BDS在UUV路径跟踪方面的精度,选取在GPS作用下UUV的路径跟踪实验,比较两者导航定位性能的优劣. 图7为两种导航方式下UUV路径跟踪经纬度测试数据折线图,通过比较UUV真实曲线数据,BDS测试数据以及GPS测试数据可以清晰地看到,由于BDS定位系统是具有同步轨道并能支持三个频率工作的系统,在亚太地区BDS的定位精度和GPS不相上下,甚至比GPS定位精度更高,完全满足近海UUV的定位导航及路径跟踪.
5. 结论及展望
通过将我国自主研发的北斗定位模块运用到UUV上,确保了UUV能够实时改变自身航向跟踪目标直线路径,北斗定位模块实时获取UUV的位置坐标及航向信息,通过无线传输模块将UUV坐标信息发送到高性能STM32单片机,经过单片机模块的中值滤波及卡尔曼滤波,消除数据噪声及缺陷数据. 上位机模块接收到来至单片机的数据后,一方面分析,显示及保存;另一方面比较UUV实际路径与目标路径偏差,通过高性能STM32单片机将新的控制指令发送给运动部件,控制UUV的航向,同时采用北斗短报文通信实现了极端环境无线信号难以抵达的条件下北斗定位模块,高性能STM32单片机及上位机信息的双向传输. 通过各模块协同配合实现了近海UUV精确的路径跟踪.
由于深海中无线信号很难抵达,所以选择BDS作为导航定位系统的UUV只能在近海海域工作,未来要想走向深海,还需要研究基于水声定位系统或惯性导航系统(INS)的导航定位方式. 复合导航及多种控制方式结合的UUV将是发展的趋势.
-
表 2 UUV目标位置与实际位置经纬度对照
监测点 实际位置/(°) 目标位置/(°) 速度/(m/s) 1 30.879 8N, 121.910 1E 30.879 8N, 121.910 1E 0.5 2 30.880 6N, 121.909 9E 30.880 5N, 121.909 6E 0.5 3 30.881 4N, 121.910 5E 30.881 4N, 121.910 4E 0.5  下载: 导出CSV
下载: 导出CSV
-
[1] 吴志峰, 吴子岳. 基于GPS/MATLAB的AUV路径优化分析[J]. 计量学报, 2020, 41(8): 927-930. [2] 张慧莎. 高动态北斗导航自适应抗干扰技术研究[D]. 南京: 南京理工大学, 2018. [3] 王永鼎, 程湘裕. 基于BDS的混合动力船舶节能研究[J]. 全球定位系统, 2020, 45(2): 112-118. [4] 姜少杰, 王宪, 刘海敌, 等. 基于GPS/BDS组合的浅海AUV定位性能分析[J]. 全球定位系统, 2018, 43(3): 124-128. [5] 崔秀芳, 蔡陈玉, 李志刚. 基于北斗卫星的渔船监控系统设计[J]. 全球定位系统, 2018, 43(3): 119-121. [6] 王永鼎, 李华南, 钱莹娟. 北斗卫星导航系统在AUV中的应用[J]. 全球定位系统, 2018, 43(1): 98-99. [7] 石祥, 许哲, 何青义. 基于PCI8602的无人水面艇控制系统设计[J]. 测控技术, 2014, 33(12): 77-80, 84. DOI: 10.3969/j.issn.1000-8829.2014.12.021 [8] 吴子岳, 宋彦良, 吴志峰, 等. 基于GNSS的自主巡航四足机器人及远程监测系统设计[J]. 全球定位系统, 2018, 43(5): 113-115. [9] 彭勇, 陈俞强. 基于改进卡尔曼滤波的北斗GPS联合定位算法[J]. 计算技术与自动化, 2018, 37(2): 59-62. [10] 杜涓, 陈家林. 基于STM32的移动机器人自适应跟踪系统设计[J]. 自动化与仪表, 2020, 35(11): 44-48. [11] 陈钊, 黄凤辰, 花再军. 北斗卫星通信在远程自动气象站中的应用[J]. 工业控制计算机, 2016, 29(10): 60-61. DOI: 10.3969/j.issn.1001-182X.2016.10.027 [12] 刘飞, 林琳, 徐文江. 基于北斗RDSS的监视数据传输技术研究[J]. 信息技术, 2020, 44(01): 15-19. -
期刊类型引用(3)
1. 吴新冬,申冲,曹慧亮,王晨光,唐军,刘俊. 水下仿生光磁导航技术综述. 战术导弹技术. 2023(04): 13-25 .  百度学术
百度学术
2. 李明,饶弘. 基于北斗的无人机高精度自主导航与监控技术分析. 电子元器件与信息技术. 2022(01): 164-166 . 百度学术
3. 吴清云,陈凌轩,刘昕,曹宇,谢朋洋. BDS在陆地智能巡检无人车中的应用. 全球定位系统. 2022(04): 64-72 . 本站查看
其他类型引用(0)




























计量
- 文章访问数: 987
- HTML全文浏览量: 370
- PDF下载量: 95
- 被引次数: 3
