

BDS application of offshore UUV path tracking
-
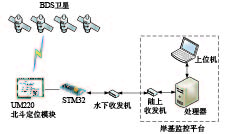
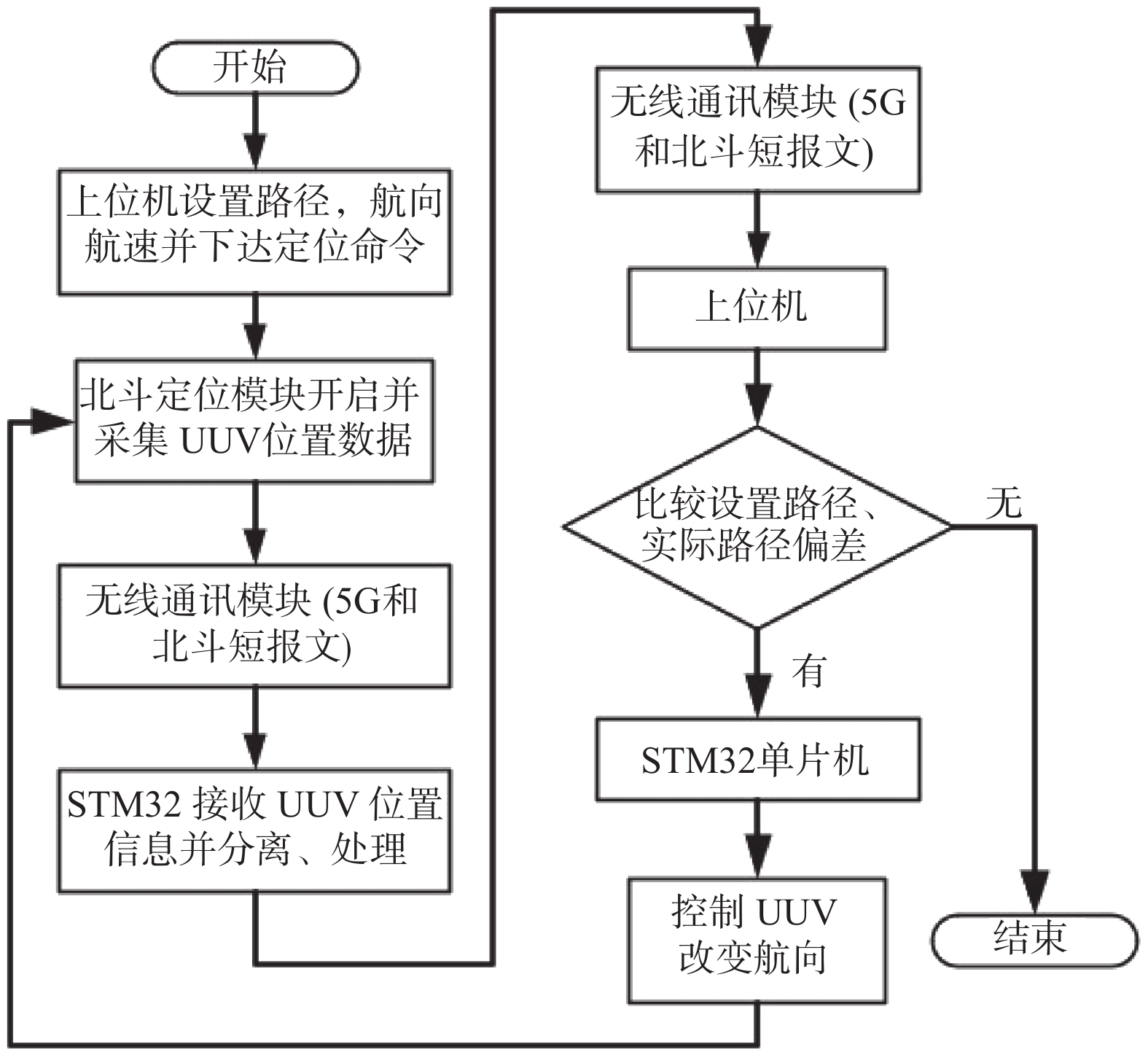
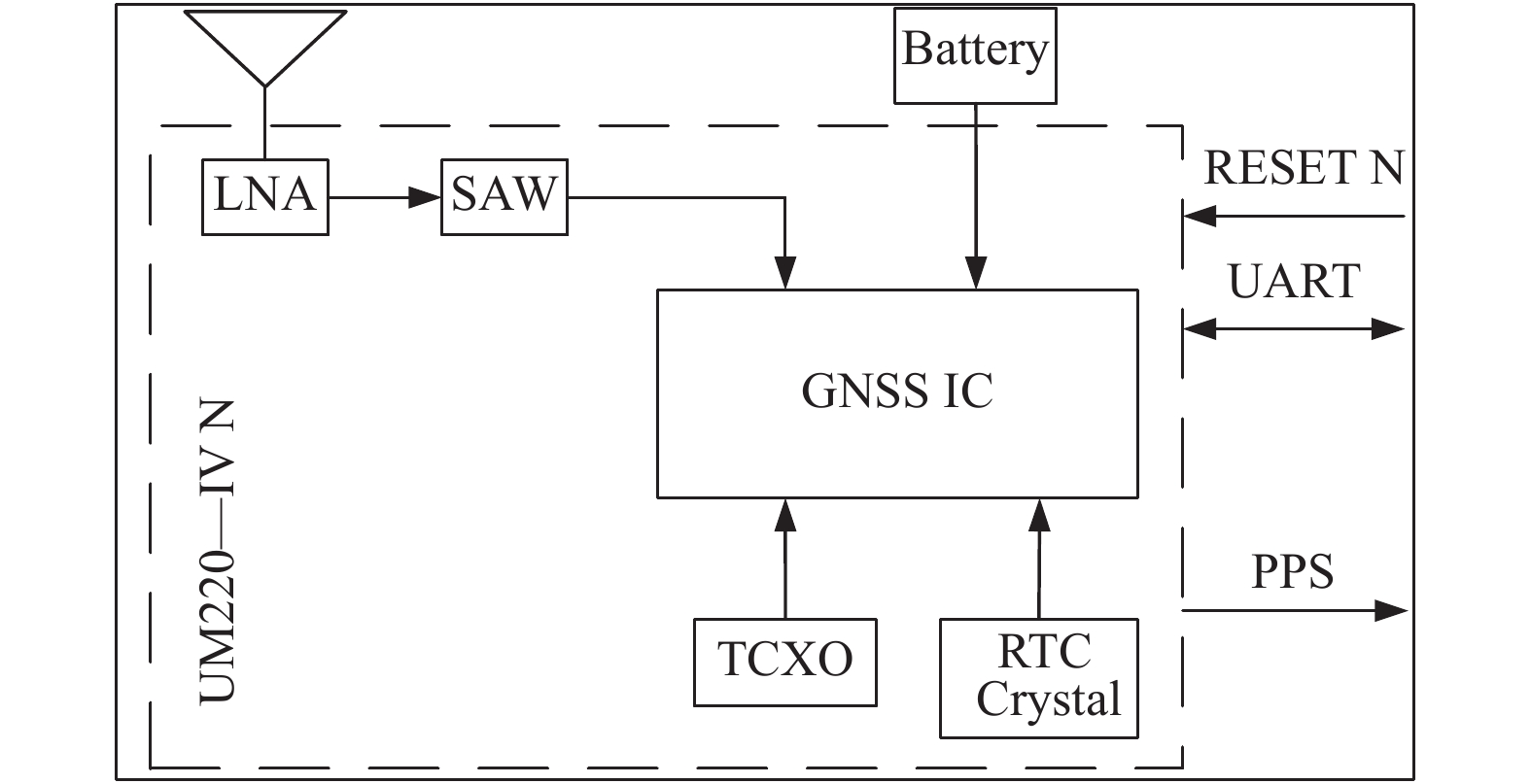
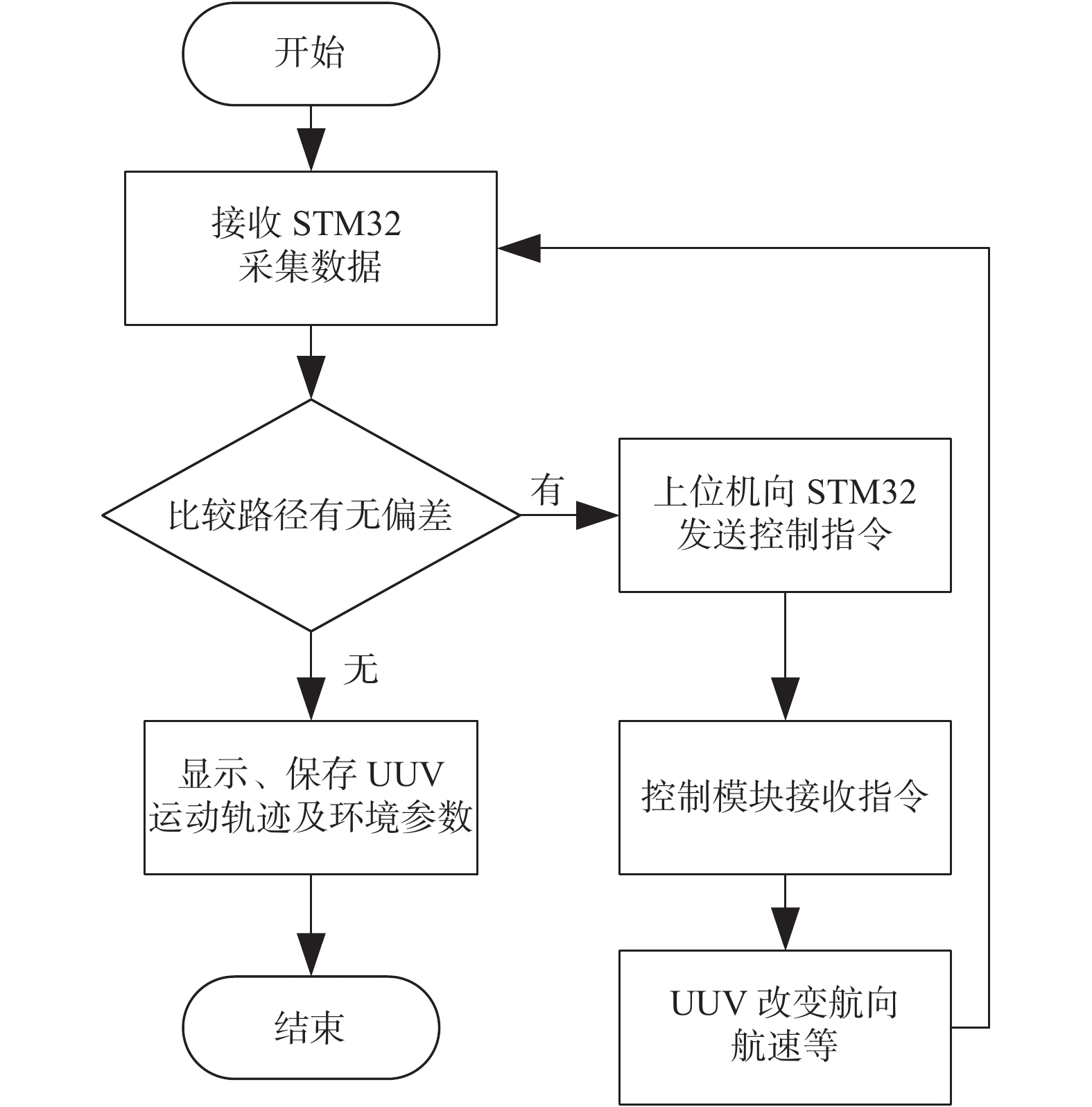
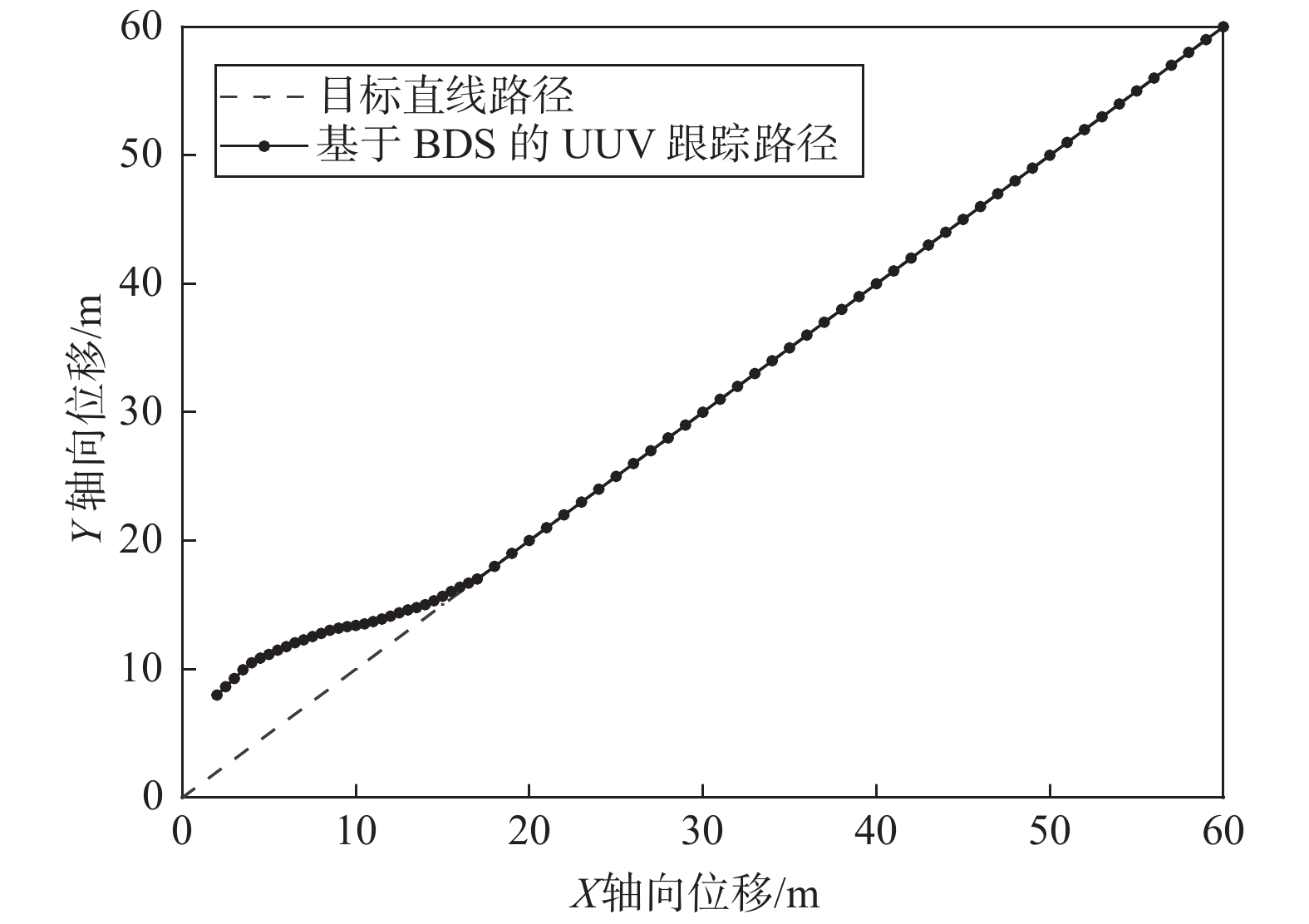
摘要: 针对无人水下航行器(UUV)沿给定路径航行时会出现各种偏差的问题,设计了一款运用高性能STM32单片机与UM220-Ⅳ N定位模块搭建的导航定位分系统. 将其应用于UUV特定的路径跟踪方面,通过单片机将北斗定位模块采集到的UUV位置坐标、航速航向等数据发送到上位机,上位机将其与给定跟踪路径数据进行对比,计算路径偏差并通过单片机控制UUV的驱动模块改变UUV运动方向,实现对给定路径的精确跟踪. 同时通过无线通讯模块,将UUV路径轨迹及采集的水质信息实时显示在岸基监控系统上位机软机界面. 水下实验表明,UUV路径跟踪精度明显提高,为纠正UUV路径跟踪偏差提供了一种参考方法.
-
关键词:
- 无人水下航行器(UUV) /
- 北斗卫星导航系统(BDS) /
- 路径跟踪 /
- STM32单片机
Abstract: In order to solve the problem of various deviations when unmanned underwater vehicle (UUV) navigates along a given path. A system combining STM32 and UM220-IV N module based on Beidou Navigation Satelite System (BDS) is designed and applied to the specific path tracking of unmanned underwater vehicle. The position coordinates, velocity and direction data of UUV collected by the BDS positioning module are sent to the upper computer through the single-chip microcomputer module. The upper computer compares the data with the given tracking path data, calculates the path deviation, and controls the UUV driving module to change the UUV motion direction, so as to achieve accurate tracking of the given path. At the same time, through the wireless communication module, the water quality information collected by the UUV path track and information acquisition module can be displayed on the upper computer interface of the shore based monitoring system in real time. The underwater experiments show that the accuracy of UUV path tracking is significantly improved, which provides a reference method for correcting the path tracking error of UUV. -
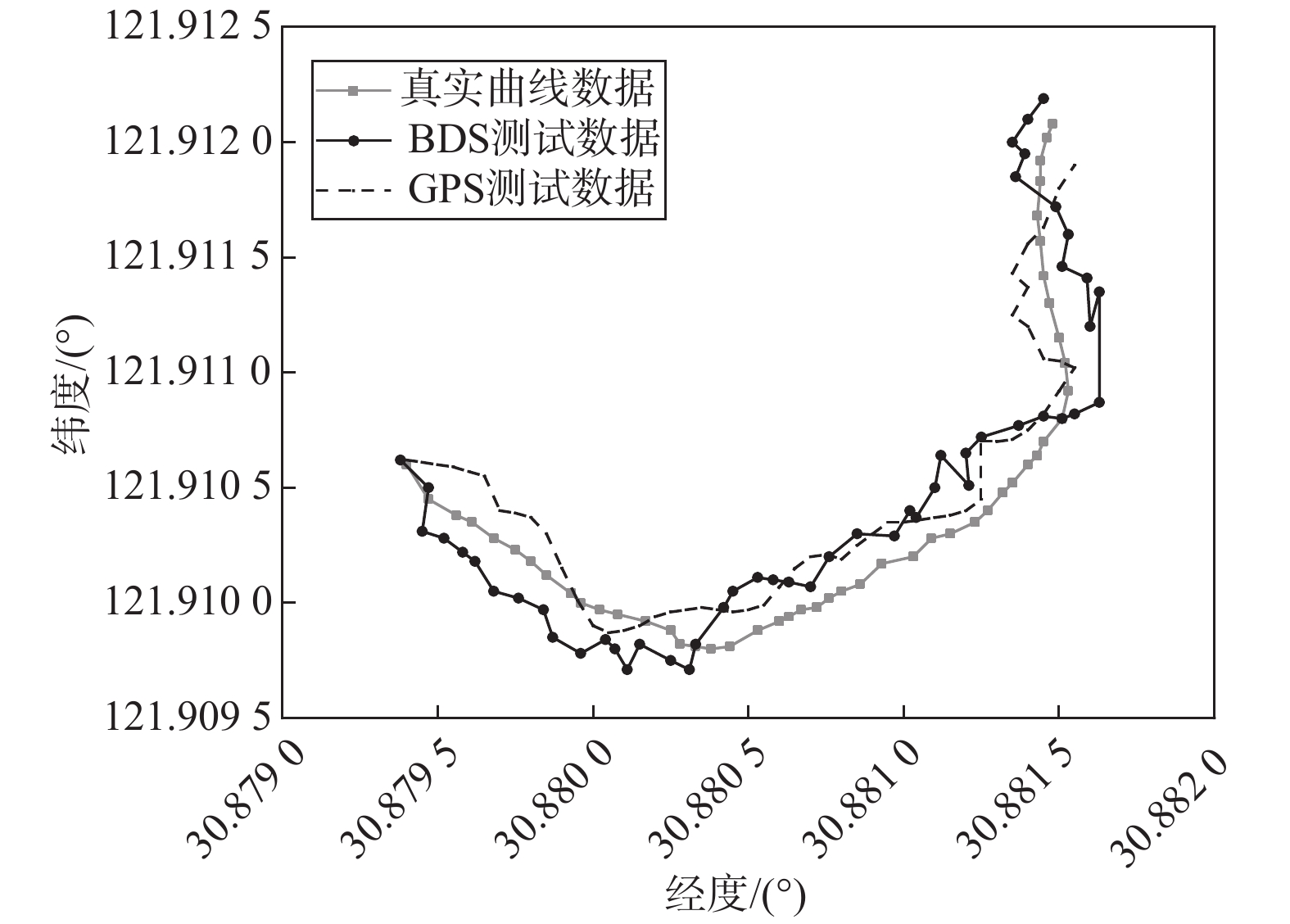
表 2 UUV目标位置与实际位置经纬度对照
监测点 实际位置/(°) 目标位置/(°) 速度/(m/s) 1 30.879 8N, 121.910 1E 30.879 8N, 121.910 1E 0.5 2 30.880 6N, 121.909 9E 30.880 5N, 121.909 6E 0.5 3 30.881 4N, 121.910 5E 30.881 4N, 121.910 4E 0.5  下载: 导出CSV
下载: 导出CSV
-
[1] 吴志峰, 吴子岳. 基于GPS/MATLAB的AUV路径优化分析[J]. 计量学报, 2020, 41(8): 927-930. [2] 张慧莎. 高动态北斗导航自适应抗干扰技术研究[D]. 南京: 南京理工大学, 2018. [3] 王永鼎, 程湘裕. 基于BDS的混合动力船舶节能研究[J]. 全球定位系统, 2020, 45(2): 112-118. [4] 姜少杰, 王宪, 刘海敌, 等. 基于GPS/BDS组合的浅海AUV定位性能分析[J]. 全球定位系统, 2018, 43(3): 124-128. [5] 崔秀芳, 蔡陈玉, 李志刚. 基于北斗卫星的渔船监控系统设计[J]. 全球定位系统, 2018, 43(3): 119-121. [6] 王永鼎, 李华南, 钱莹娟. 北斗卫星导航系统在AUV中的应用[J]. 全球定位系统, 2018, 43(1): 98-99. [7] 石祥, 许哲, 何青义. 基于PCI8602的无人水面艇控制系统设计[J]. 测控技术, 2014, 33(12): 77-80, 84. DOI: 10.3969/j.issn.1000-8829.2014.12.021 [8] 吴子岳, 宋彦良, 吴志峰, 等. 基于GNSS的自主巡航四足机器人及远程监测系统设计[J]. 全球定位系统, 2018, 43(5): 113-115. [9] 彭勇, 陈俞强. 基于改进卡尔曼滤波的北斗GPS联合定位算法[J]. 计算技术与自动化, 2018, 37(2): 59-62. [10] 杜涓, 陈家林. 基于STM32的移动机器人自适应跟踪系统设计[J]. 自动化与仪表, 2020, 35(11): 44-48. [11] 陈钊, 黄凤辰, 花再军. 北斗卫星通信在远程自动气象站中的应用[J]. 工业控制计算机, 2016, 29(10): 60-61. DOI: 10.3969/j.issn.1001-182X.2016.10.027 [12] 刘飞, 林琳, 徐文江. 基于北斗RDSS的监视数据传输技术研究[J]. 信息技术, 2020, 44(01): 15-19. -

 点击查看大图
点击查看大图

图(7) / 表(2)
计量
- 文章访问数: 953
- HTML全文浏览量: 349
- PDF下载量: 60
- 被引次数: 0
