

Performance analysis of high precision kinematic positioning of GPS-RTK/UWB tight combination
-
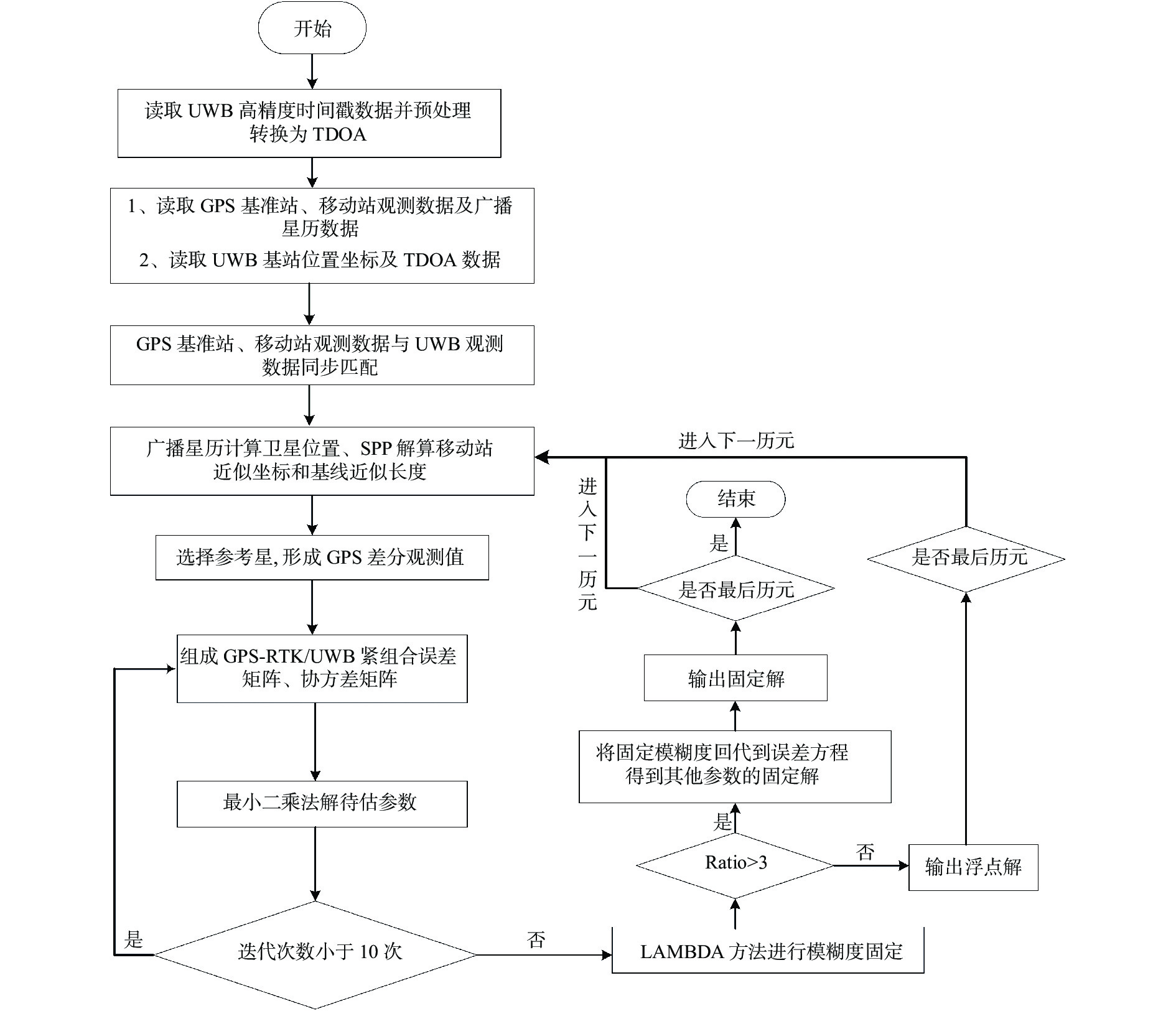
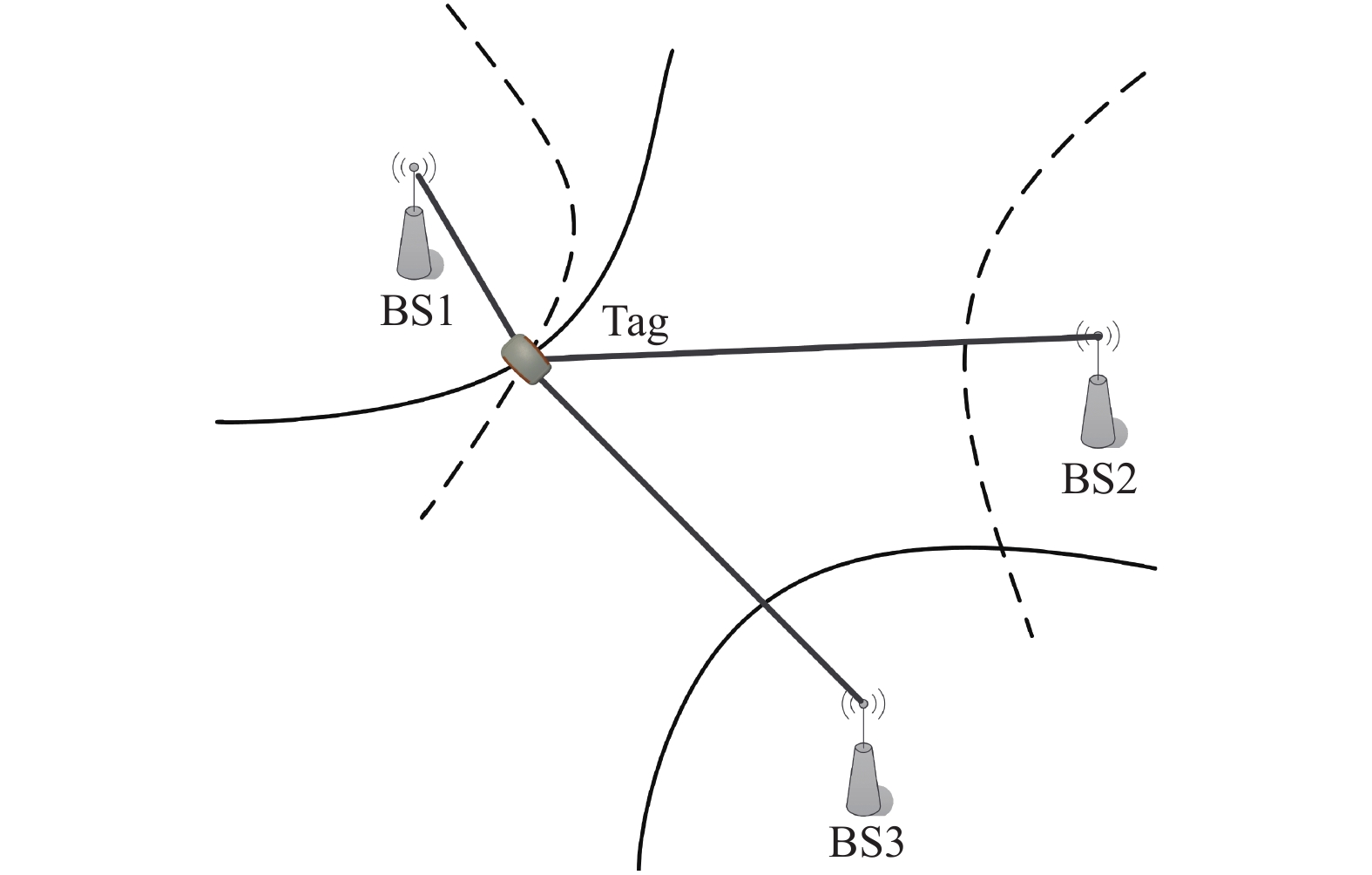
摘要: 为克服GPS-RTK定位在复杂环境下由于信号遮挡,可视卫星数量不足等原因无法获取厘米级高精度定位结果的不足,研究将超宽带(UWB)短距离高精度定位系统与实时动态(RTK)进行紧组合来提高复杂环境下动态定位的精度. 依据UWB定位原理,给出了GPS-RTK/UWB紧组合数学模型,详细介绍了数据处理流程. 滑轨动态实验结果表明,观测环境良好时,GPS-RTK/UWB紧组合与GPS相比能进一步提升固定率和动态定位精度;在截止高度角为40°的情况下,模糊度固定率从20.93%显著提升到93.96%,N、E方向定位精度提升至厘米级,U方向定位精度提升至分米级,仍能满足一定的工程需要.Abstract: To overcome the shortage that GPS-RTK can not obtain centimeter level high precision positioning results due to signal blockage, insufficient satellites number and other reasons under complicated environment, in this paper, the tightly combination of ultra-wide band (UWB) short-range high precision positioning system and RTK are studied to improve the precision of dynamic positioning under complicated environment. According to the principle of UWB, the mathematical model of GPS-RTK/UWB tight combination is presented, and the data processing flow is introduced in detail. The experimental results show that GPS-RTK/UWB tight combination can further improve the ambiguity fixed success rate and dynamic positioning precision compared with only GPS when the observation environment is well. In a complicated environment with a cut-off mask elevation angle of 40 degree, the ambiguity fixed success rate was significantly increased from 20.93% to 93.96%. The positioning precision of N and E directions are improved to centimeter level, and that of U directions is improved to decimeter level, which can still meet certain engineering measurement needs.
-
Key words:
- GPS-RTK /
- ultra-wide band (UWB) /
- time difference of arrive /
- tightly combination /
- integer ambiguity
-
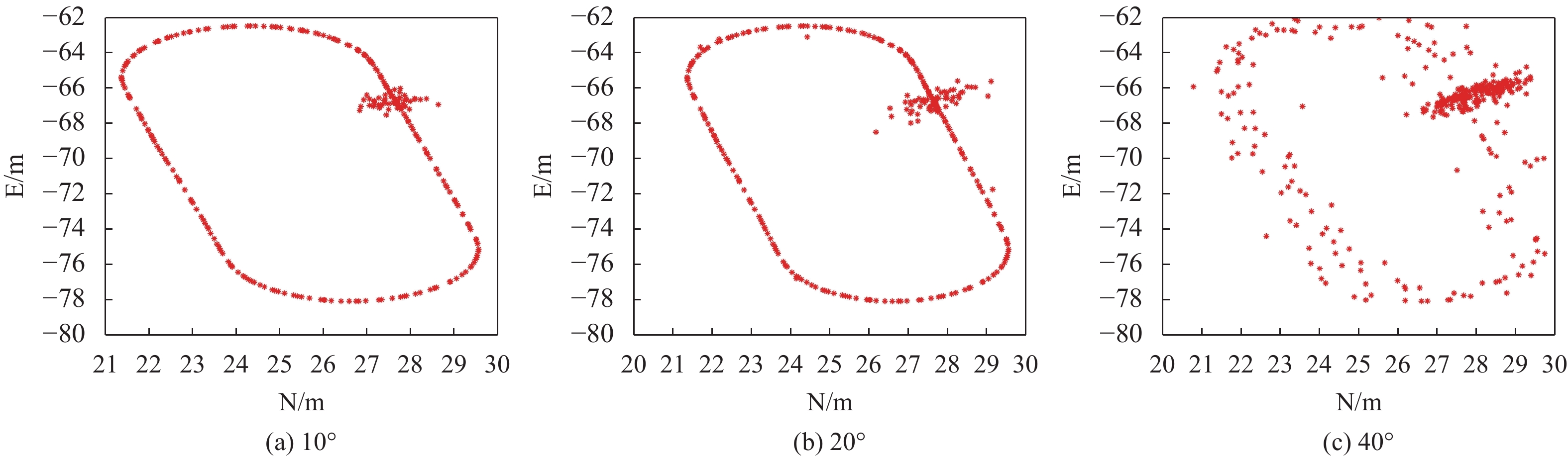
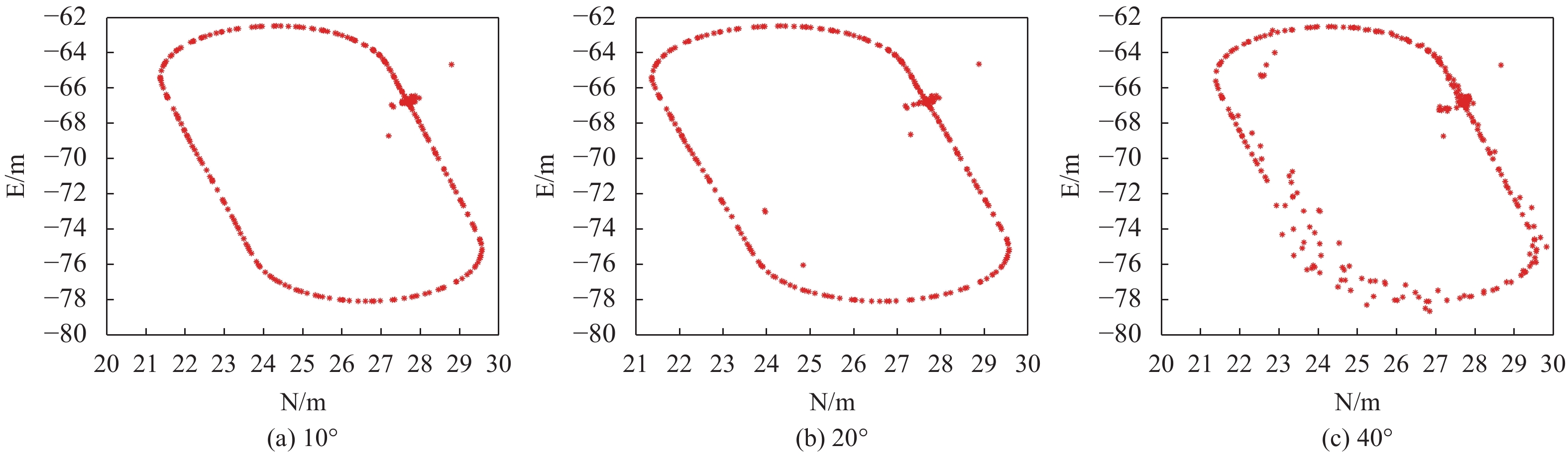
表 2 截止高度角10°时小推车位置误差统计
定位模式 方向 无遮挡时段 提升比例/% 人为遮挡干扰时段 提升比例/% Min/m Max/m Mean/m RMS/m Min/m Max/m Mean/m RMS/m GPS-RTK N −0.541 0.263 −0.001 0.023 − −0.906 1.372 0.044 0.235 − E −0.215 0.182 0.001 0.011 − −0.694 2.333 0.018 0.246 − U −0.014 0.963 −0.001 0.043 − −1.392 1.554 0.108 0.418 − GPS-RTK/UWB N −0.008 0.023 −0.000 0.012 47.8 −0.263 0.391 −0.001 0.059 74.8 E −0.007 0.014 0.000 0.007 36.4 −0.091 0.245 −0.001 0.035 85.7 U −0.015 0.089 −0.007 0.028 34.8 −1.825 1.466 0.022 0.329 21.3  下载: 导出CSV
下载: 导出CSV
表 3 截止高度角20°时小推车位置误差统计
定位模式 方向 无遮挡时段 提升比例/% 人为遮挡干扰时段 提升比例/% Min/m Max/m Mean/m RMS/m Min/m Max/m Mean/m RMS/m GPS-RTK N −1.032 1.502 0.003 0.097 − −1.44 1.143 0.024 0.303 − E −0.921 1.623 0.005 0.093 − −1.175 2.013 0.000 0.301 − U −5.433 2.934 −0.014 0.289 − −3.122 4.676 0.198 0.918 − GPS-RTK/UWB N −0.715 0.015 −0.001 0.041 57.7 −0.356 0.474 0.002 0.070 76.8 E −0.827 0.018 0.000 0.042 54.8 −0.124 0.312 0.001 0.043 85.7 U −0.063 2.589 −0.006 0.155 46.4 −2.192 1.734 0.007 0.434 52.7
下载: 导出CSV
表 4 截止高度角40°时小推车位置误差统计
定位模式 方向 无遮挡时段 提升比例/% 人为遮挡干扰时段 提升比例/% Min/m Max/m Mean/m RMS/m Min/m Max/m Mean/m RMS/m GPS-RTK N −1.595 1.469 −0.165 0.547 − −1.698 0.975 −0.234 0.574 − E −2.023 1.049 −0.247 0.501 − −1.684 0.848 −0.333 0.587 − U −4.038 5.236 0.494 1.521 − −2.396 5.339 0.917 1.745 − GPS-RTK/UWB N −1.241 0.504 −0.061 0.040 92.6 −0.132 0.388 −0.005 0.043 92.5 E −0.775 0.637 −0.044 0.033 93.4 −0.233 0.310 −0.015 0.058 90.1 U −1.257 2.544 0.087 0.144 90.5 −2.198 1.302 −0.037 0.439 74.8 注:Min表示最小误差值,Max表示最大误差值,Mean表示平均误差值,RMS表示误差均方根值
下载: 导出CSV
-
[1] 徐周. GPS差分定位技术及实现方法的研究[D]. 郑州: 解放军信息工程大学, 2006. [2] 王世进. BDS/GPS-RTK算法研究及软件实现[D]. 阜新: 辽宁工程技术大学, 2014. [3] 李征航, 黄劲松. GPS测量与数据处理[M]. 2版. 武汉: 武汉大学出版社, 2013. [4] 胡楠楠, 章红平, 李团, 等. 城市动态环境下GNSS RTK部分模糊度固定算法性能分析[J]. 大地测量与地球动力学, 2018, 38(3): 263-267. [5] LIN S G. Assisted adaptive extended Kalman filter for low-cost single-frequency GPS/SBAS kinematic positioning[J]. GPS solutions, 2015, 19(2): 215-223. DOI: 10.1007/s10291-014-0381-9 [6] WANG J P, GAO J X, LIU C, et al. High precision slope deformation monitoring model based on the GPS/pseudolites technology in open-pit mine[J]. Mining science and technology, 2010, 20(1): 126-132. DOI: 10.1016/S1674-5264(09)60173-3 [7] ZIMMERMAN K R, COBB H S, BAUREGGER F N, et al. A new GPS augmentation solution: Terralite XPS system for mining applications and initial experience[C]//Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), 2005: 2775-2788. [8] 高军强, 汤霞清, 张环, 等. 基于因子图的车载INS/GNSS/OD组合导航算法[J]. 系统工程与电子技术, 2018, 40(11): 2547-2553. [9] XUE Y, SU W, YANG D, et al. RMLNet—A reliable wireless network for a multiarea TDOA-based localization system[J]. Sensors, 2019, 19(20): 4374. DOI: 10.3390/s19204374 [10] ALARIFI A, AL-SALMAN A, ALSALEH M, et al. Ultra-wideband indoor positioning technologies: analysis and recent advances[J]. Sensors, 2016, 16(5): 707. DOI: 10.3390/s16050707 [11] ANGELIS G D, MOSCHITTA A, CARBONE P. Positioning techniques in indoor environments based on stochastic modeling of UWB round-trip-time measurements[J]. IEEE transactions on intelligent transportation systems, 2016, 17(8): 2272-2281. DOI: 10.1109/TITS.2016.2516822 [12] 赵红梅, 赵杰磊. 超宽带室内定位算法综述[J]. 电信科学, 2018, 34(9): 130-142. [13] MACGOUGAN G D. Real-time kinematic surveying using tightly-coupled GPS and ultra-wideband ranging[D/OL]. [2020-08-02]. Calgary: The University of Calgary, 2009. http://wcm.ucalgary.ca/files/plan/macgougan2009_phd.pdf [14] MACGOUGAN G D, O’KEEFE k, KLUKAS R. Accuracy and reliability of tightly coupled GPS/ultra-wideband positioning for surveying in urban environments[J]. GPS solutions, 2010, 14(4): 351-364. DOI: 10.1007/s10291-009-0158-8 [15] 吴探诗. 基于GNSS与UWB组合的无缝定位研究[D]. 阜新: 辽宁工程技术大学, 2014. [16] ABOLFATHI E A, O'KEEFE K. Integrating vision derived bearing measurements with differential GPS and UWB ranges for vehicle-to-vehicle relative navigation[C]//Proceedings of the 26th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2013), 2013: 762-771. [17] JIANG L J, HOE L N, LOON L L. Integrated UWB and GPS location sensing system in hospital environment[C]//2010 IEEE Conference on Industrial Electronics and Applications, 2010: 286-289. DOI: 10.1109/ICIEA.2010.5516828 [18] GONZALEZ J, BLANCO J L, GALINDO C, et al. Combination of UWB and GPS for indoor-outdoor vehicle localization[C]//2007 IEEE International Symposium on Intelligent Signal Processing, 2007. DOI: 10.1109/WISP.2007.4447550 [19] 储超, 黄亮, 杜仲进, 等. 抗差估计在RTK/INS紧组合中的应用研究[J]. 全球定位系统, 2019, 44(5): 18-25. [20] 许国昌, 许艳. GPS理论、算法与应用[M]. 3版. 北京: 科学出版社, 2017. -

 点击查看大图
点击查看大图
图(7) / 表(4)
计量
- 文章访问数: 682
- HTML全文浏览量: 756
- PDF下载量: 74
- 被引次数: 0
