

Fault tolerance technology on INS/GNSS/ODO embedded system
-
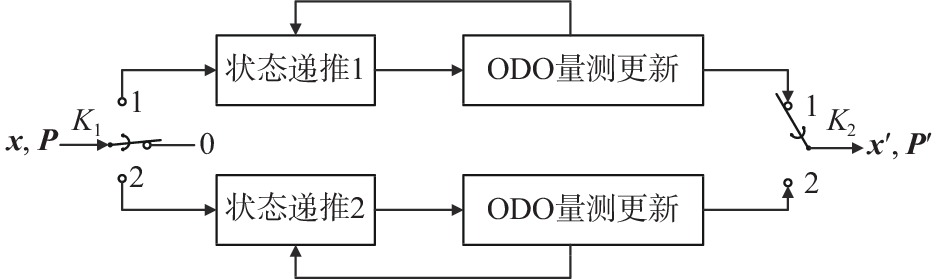
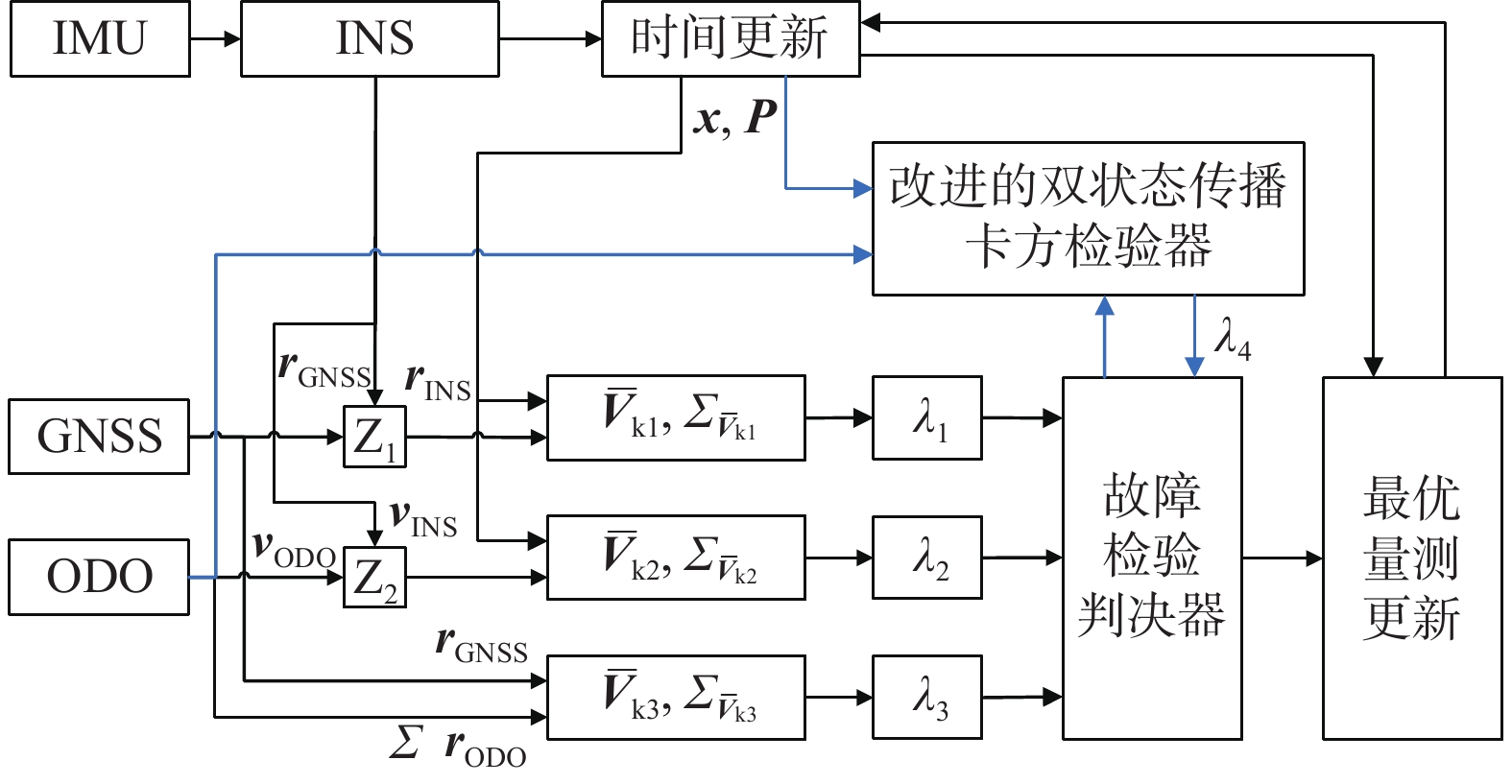
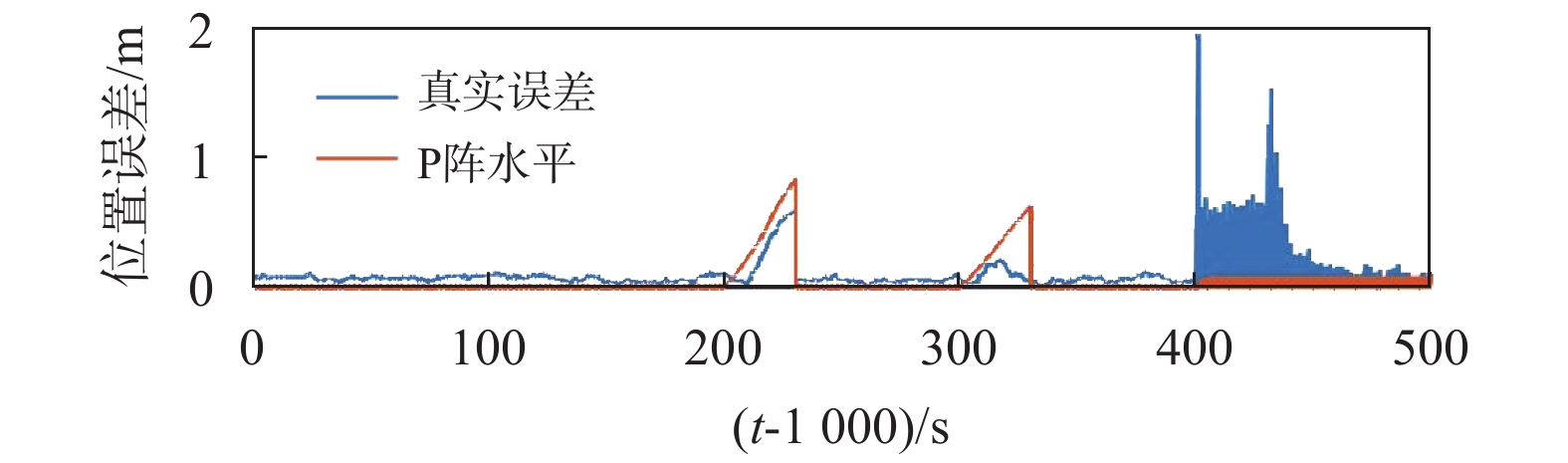
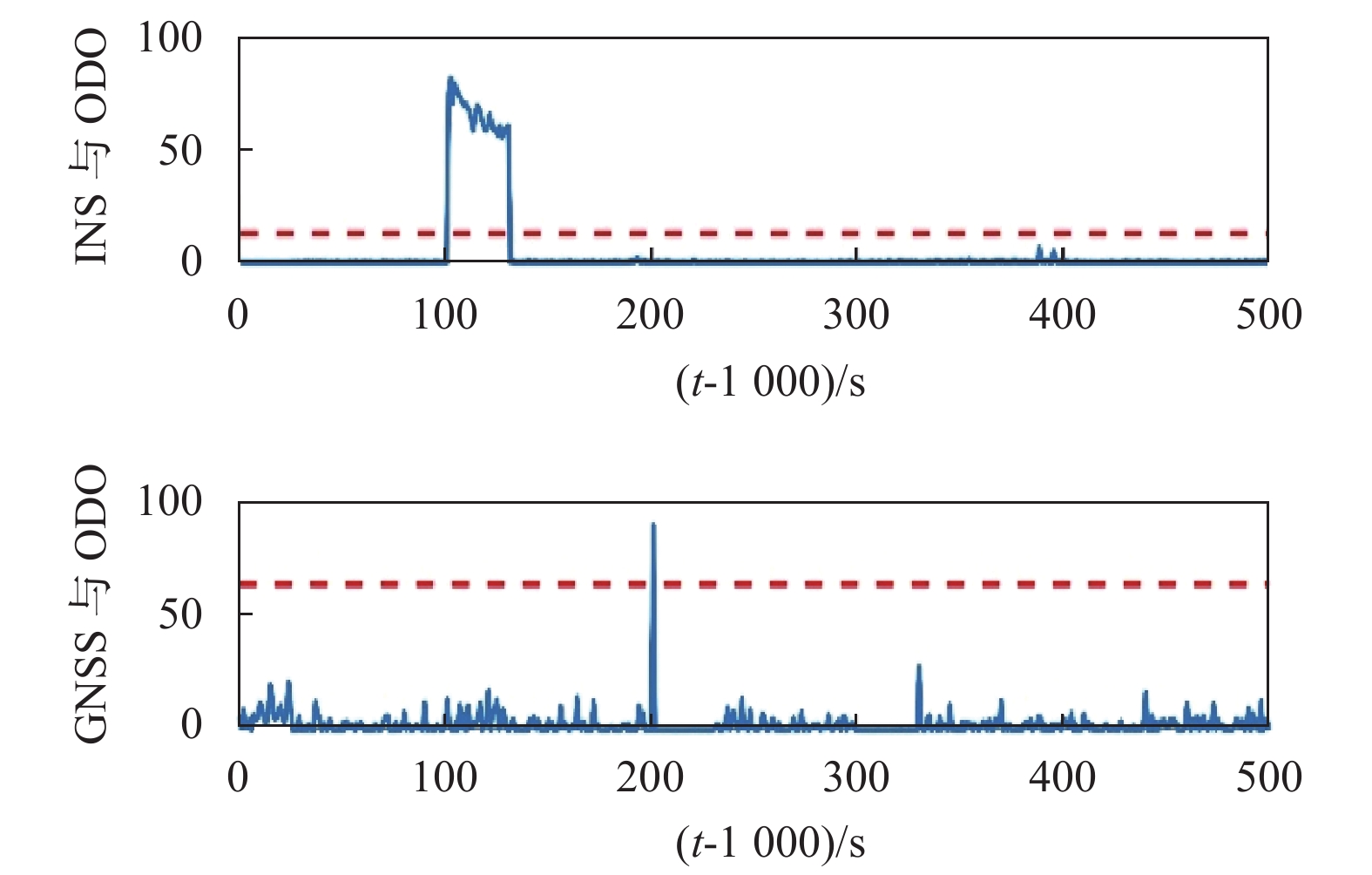
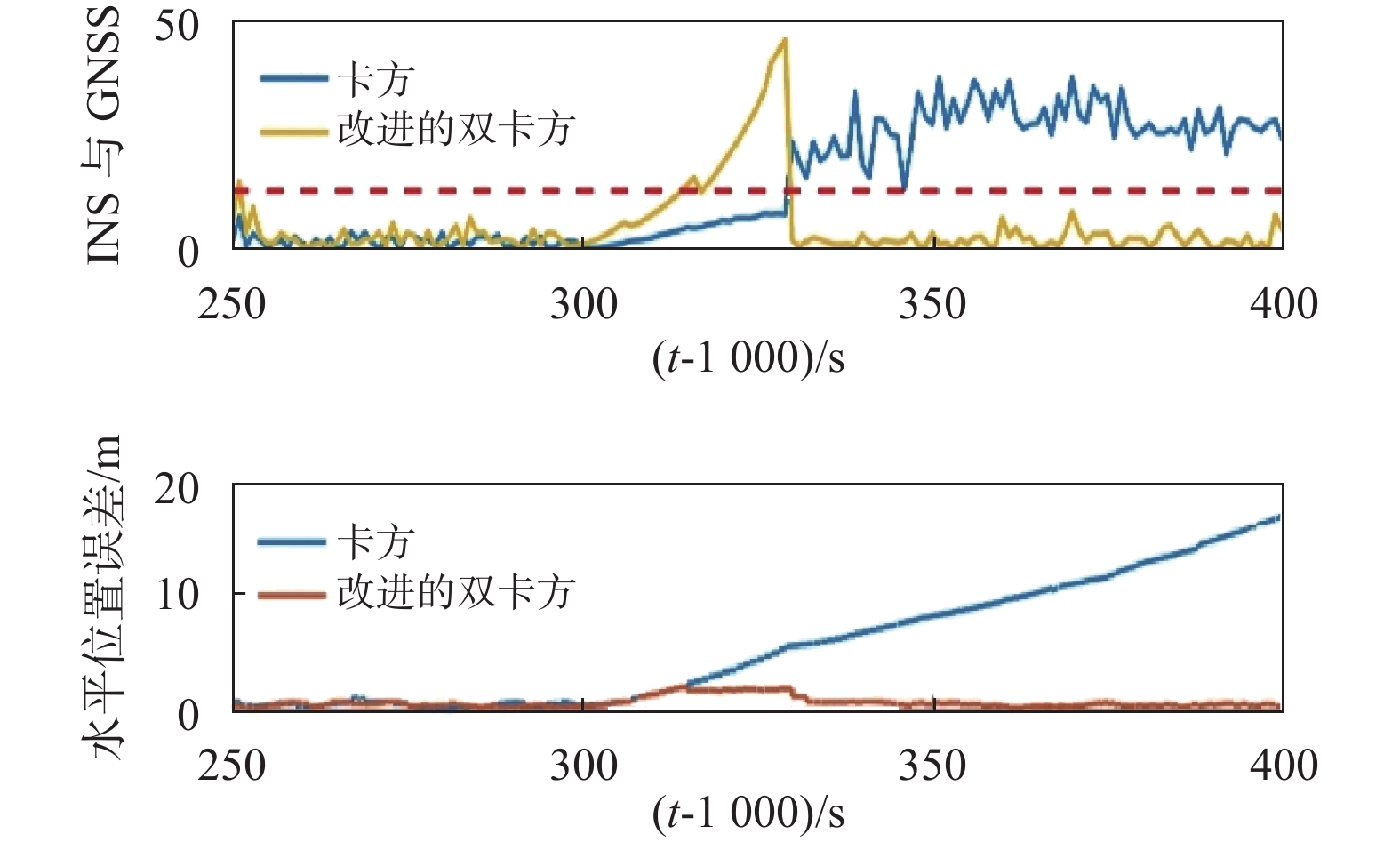
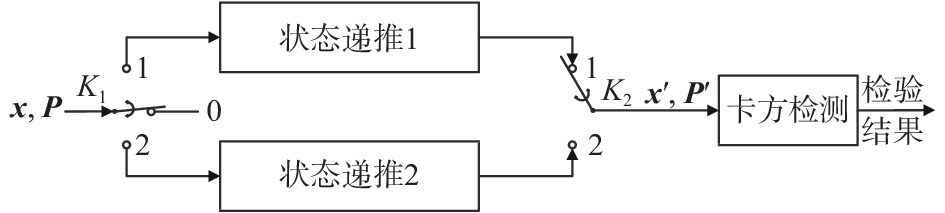
摘要: 车载低成本嵌入式组合导航系统的可靠性容易受到多种传感器故障和环境的影响,基于全球卫星导航系统(GNSS)状态的惯性导航系统(INS)/GNSS/里程计(ODO)抗差组合导航算法,提出了一种两级故障检测处理方法. 其中,第一级检测使用了基于解析冗余的残差卡方检验法,第二级检测使用了改进的双状态传播卡方检验算法. 利用自主研制的GN310低成本嵌入式系统采集路测数据. 结果表明:相对于传统算法,水平定位精度提升了39.7%;另外在半实物仿真下,水平定位误差保持在3 m以内,表明该容错方法能够有效地处理ODO、INS故障和GNSS软硬故障.Abstract: Aiming at the problem that the reliability of the low-cost embedded integrated navigation system is easily affected by various sensor failures and environment, a two-level fault detection and processing method is proposed based on inertial navigation system/GNSS/Odometer (INS/GNSS/ODO) robust integrated navigation algorithm with multiple Global navigation satellite system(GNSS)states. The first level detection uses the residual chi square test method based on analytic redundancy, and the second level test uses the improved dual state propagation chi square test algorithm use the self-developed GN310 low-cost embedded system to collect drive test data. The results show that the horizontal positioning accuracy is improved by 39.7% compared with the traditional algorithm. In addition, in the hardware in the loop simulation, the horizontal positioning error is kept within 3 m, which shows that the fault-tolerant method can effectively deal with ODO, mechanical arrangement fault and GNSS soft fault.
-
表 1 RTK固定解时的第一级故障判决表
判别结论 ${\lambda _1} \leqslant \chi _{{\rm{u}}1}^2$ ${\lambda _2} \leqslant \chi _{{\rm{u2}}}^2$ ${\lambda _3} \leqslant \chi _{{\rm{u3}}}^2$ ODO故障 Y N N INS故障 N N Y GNSS故障 N Y − 注:“Y”表示表达式成立,“N”表示表达式不成立,“−”表示判别结论与该表达式无关.  下载: 导出CSV
下载: 导出CSV
表 2 含噪定位解时的第一级故障判决表
判别结论 判决条件 GNSS故障 ${\lambda _1} \leqslant \chi _{{\rm{u}}1}^2$ ODO故障 ${\lambda _2} \leqslant \chi _{{\rm{u2}}}^2$ INS故障 IMU硬件冗余检测
下载: 导出CSV
表 3 IMU性能指标
性能指标 陀螺 加速度计 零偏稳定性 ±1 dps(25 ℃)
±0.01 dps/℃±25 mg(25 ℃)
±1 mg/℃标度因子 ±1%(25 ℃)25 ℃
±2%(−40 ℃ to +85 ℃)±1%(25 ℃)
±1.5%(−40 ℃ to +85 ℃)噪声谱密度 0.004 dps/$\sqrt {\rm{Hz}} $ 100 μg/$\sqrt {\rm{Hz}} $ 输入范围 ±250 dps ±2 g
下载: 导出CSV
表 4 修正参数
参数 值 GNSS天线杆臂 / m \setlength{\voffset}{0pt}${\left[ {\begin{array}{*{20}{c} } { - 0.38},&{0.28},&{ - 0.13} \end{array} } \right]^{\rm{T} } }$ ODO杆臂 / m \setlength{\voffset}{0pt}${\left[ {\begin{array}{*{20}{c} } { - 0.84},&{0.9},&{1.5} \end{array} } \right]^{\rm{T} } }$ ODO标度因子误差 / % 2.6 俯仰安装角误差 / (°) 0.76 航向安装角误差 / (°) −1.46
下载: 导出CSV
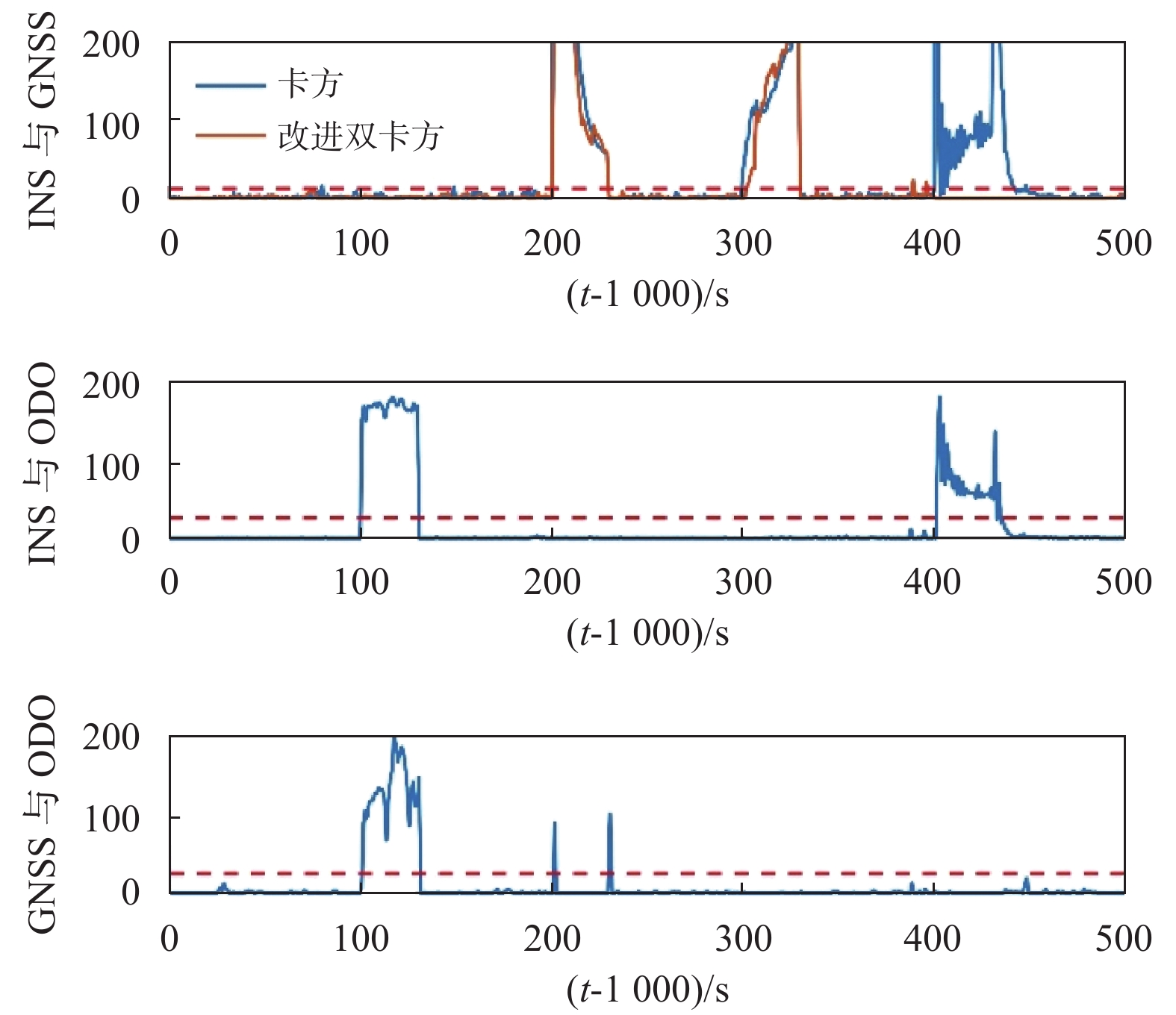
表 5 故障条件
故障类型 故障时段/s RTK固定解下
故障值(组1)含噪声定位解下
故障值(组2)ODO故障 1 100~1 130 2 m 2 m GNSS硬故障 1 200~1 230 2 m 10 m GNSS软故障 1 300~1 330 0.15 m/s×t 0.33 m/s×t INS故障 1 400~1 430 0.02 m 无法检测,不设置
下载: 导出CSV
-
[1] 薛文婷, 张波, 李署坚. 组合导航中一种新息自适应卡尔曼滤波算法[J]. 全球定位系统, 2014, 39(4): 8-11. [2] WEN X, JI L, ZHANG X W, et al. Fault detection and diagnosis in the INS/GPS navigation system[C]//2014 World Automation Congress (WAC), 2014: 27-32. DOI: 10.1109/WAC.2014.6935645 [3] LIU C, WANG H L, LI N, et al. Sensor fault diagnosis of GPS/INS tightly coupled navigation system based on state chi-square test and improved simplified fuzzy ARTMAP neural network[C]//2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2017. DOI: 10.1109/ROBIO.2017.8324800 [4] LI Z W, CHENG Y M, CUI X D. Precise fault isolation method of INS/GPS/ADS integrated navigation system[C]//2019 Chinese Automation Congress (CAC), 2019. DOI: 10.1109/CAC48633.2019.8996590 [5] 杨春. 组合导航系统的故障检测与容错技术研究[D]. 南京: 南京理工大学, 2017. [6] 颜文娴, 刘党辉. 组合导航系统容错技术研究进展[J]. 全球定位系统, 2015, 40(4): 56-60. [7] REN D. Failure detection of dynamical systems with the state chi-square test[J]. Journal of guidance, control, and dynamics, 1994, 17(2): 271-277. DOI: 10.2514/3.21193 [8] 任旭阳. SINS/GPS/OD容错组合导航系统研究[D]. 武汉: 华中科技大学, 2019. [9] 张浩, 肖勇, 杨朝旭, 等. 基于双状态卡方故障检测的组合导航系统[J]. 航空学报, 2020, 41(S2): 53-60. [10] 孙湘钰. 基于GLT的冗余式捷联惯导故障检测与隔离方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2015. [11] SCHERZINGER B M, REID D B. Modified strapdown inertial navigator error models[C]//Proceedings of 1994 IEEE Position, Location and Navigation Symposium-PLANS'94, 1994. DOI: 10.1109/PLANS.1994.303345 [12] 严恭敏, 翁浚. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019. [13] 杨元喜. 自适应动态导航定位[M]. 北京: 测绘出版社, 2006. [14] CHANG G B. Robust kalman filtering based on mahalanobis distance as outlier judging criterion[J]. Journal of geodesy, 2014, 88(4): 391-401. DOI: 10.1007/s00190-013-0690-8 [15] 郑国, 杨锁昌, 张宽桥. 半实物仿真技术的研究现状及发展趋势[J]. 舰船电子工程, 2016, 36(11): 8-11. DOI: 10.3969/j.issn.1672-9730.2016.11.003 [16] 翁浚, 成研, 秦永元, 等. 车辆运动约束在SINS/OD系统故障检测中的应用[J]. 中国惯性技术学报, 2013, 21(3): 406-410. DOI: 10.3969/j.issn.1005-6734.2013.03.026 [17] WANG J, LIANG K. Multi-sensor data fusion based on fault detection and feedback for integrated navigation systems[C]//2008 International Symposium on Intelligent Information Technology Application Workshops, 2008. DOI: 10.1109/IITA.Workshops.2008.240 [18] GODHA S. Performance evaluation of low cost MEMS-based IMU integrated with GPS for land vehicle navigation application[D]. University of Calgary (Canada), 2006. -




 点击查看大图
点击查看大图
图(11) / 表(5)
计量
- 文章访问数: 727
- HTML全文浏览量: 355
- PDF下载量: 51
- 被引次数: 0
