

GPS positioning algorithm based on Kalman filter and improved DBSCAN clustering combination
-
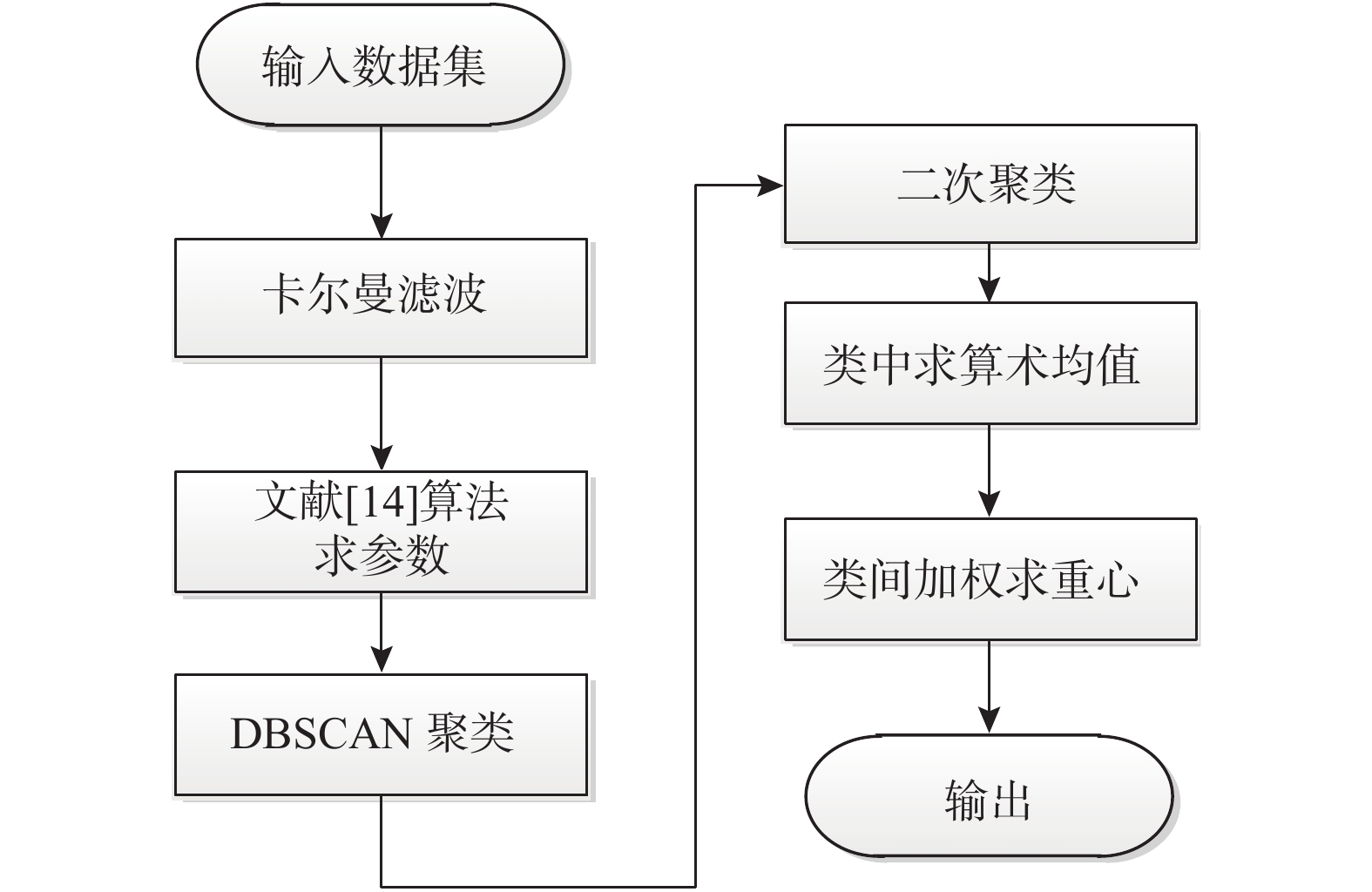
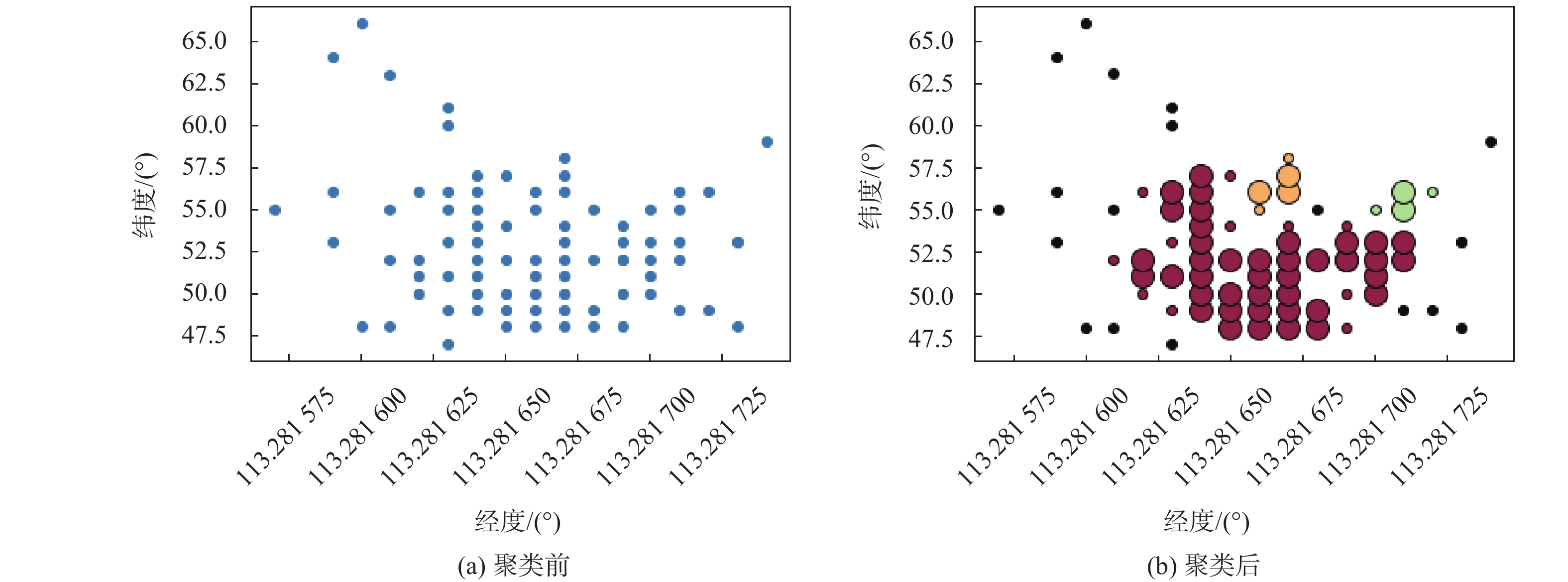
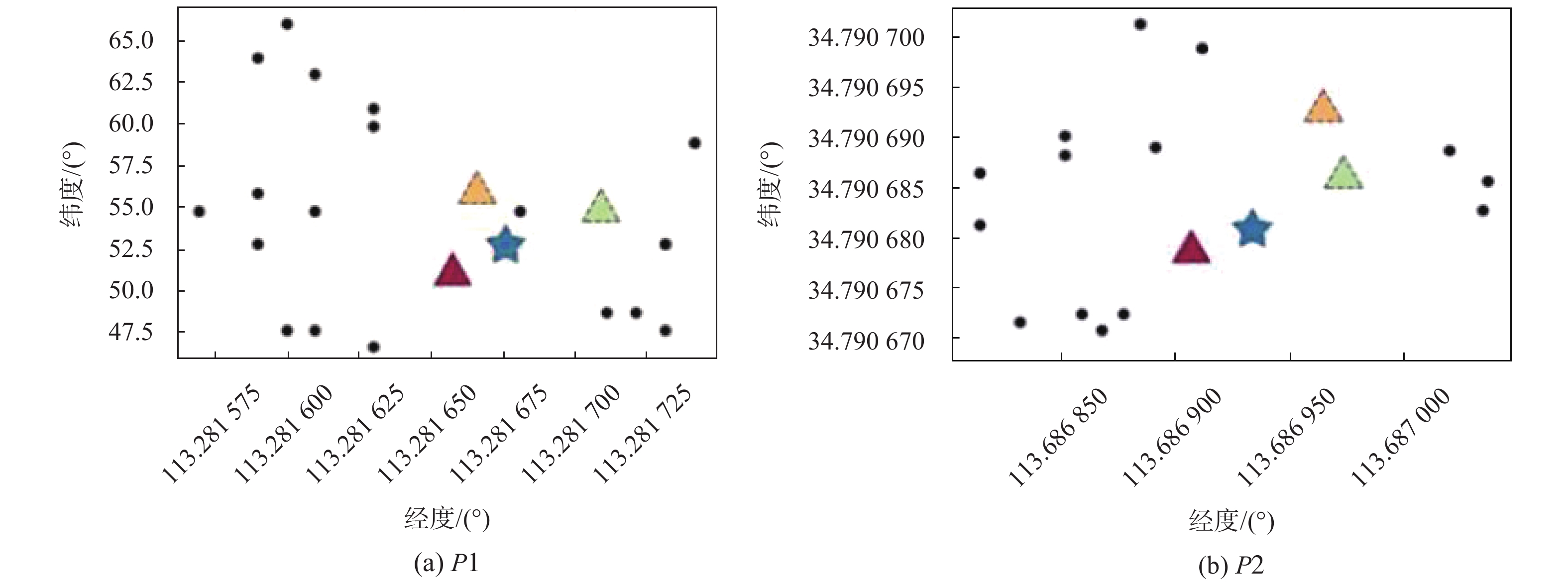
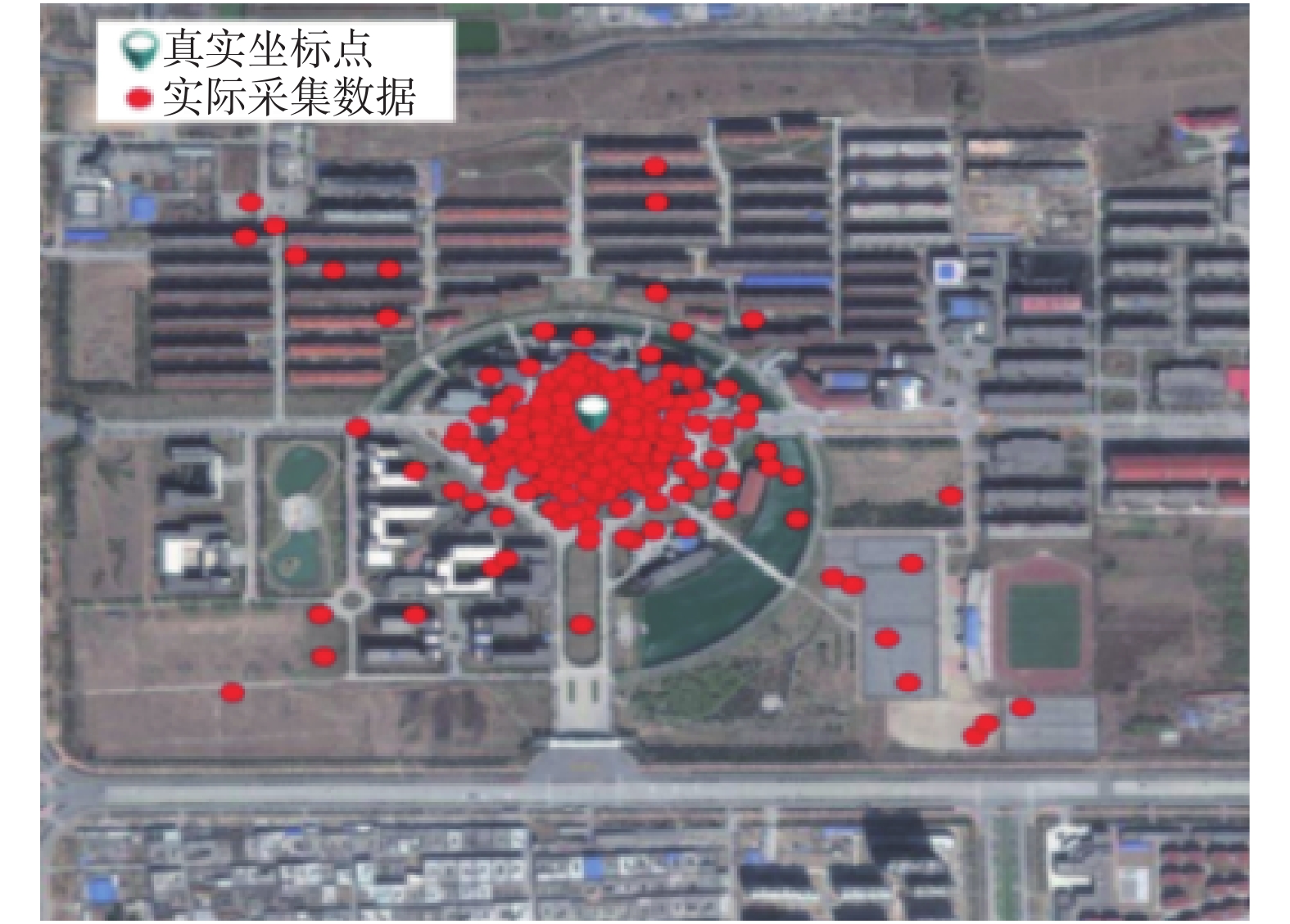
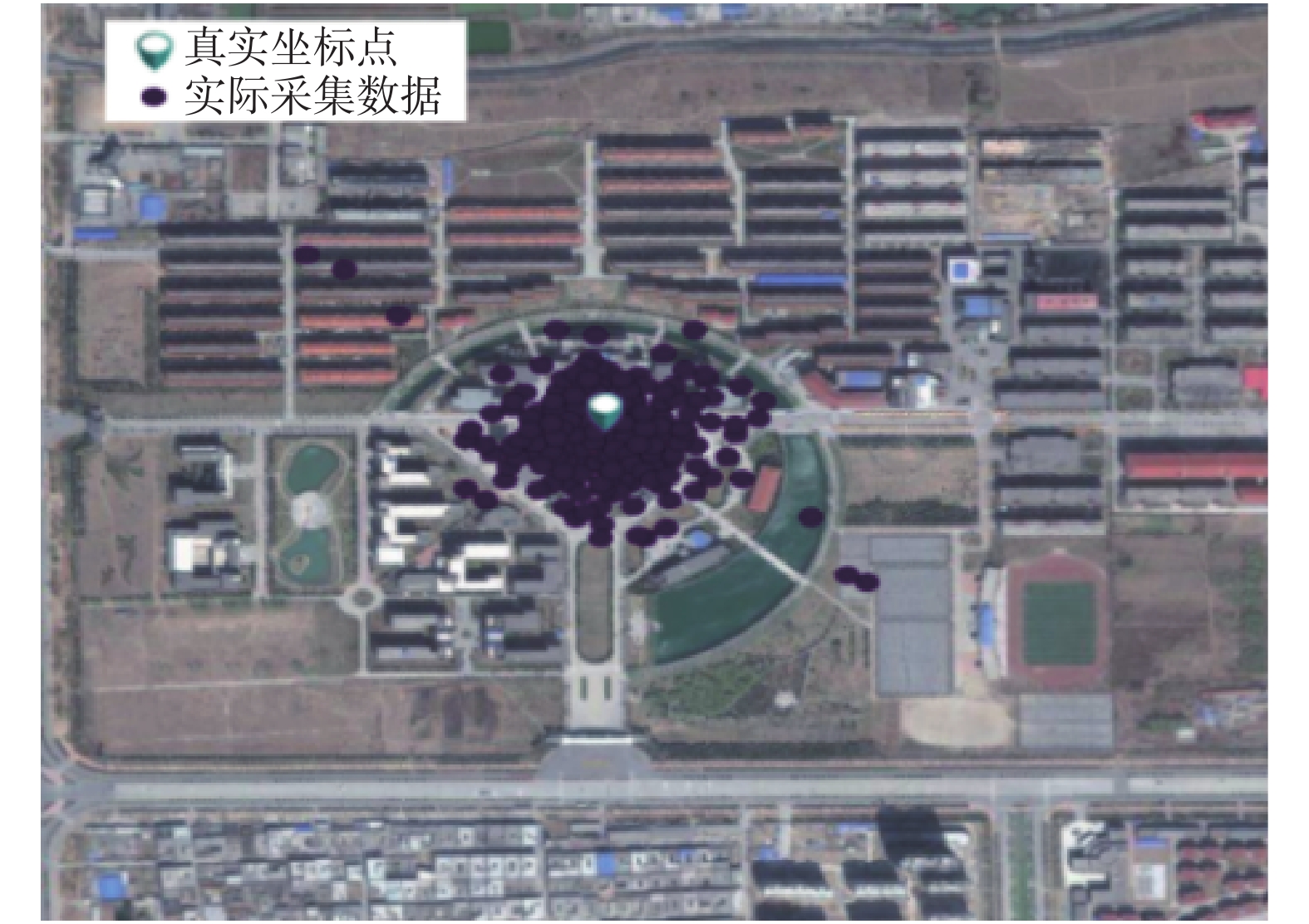
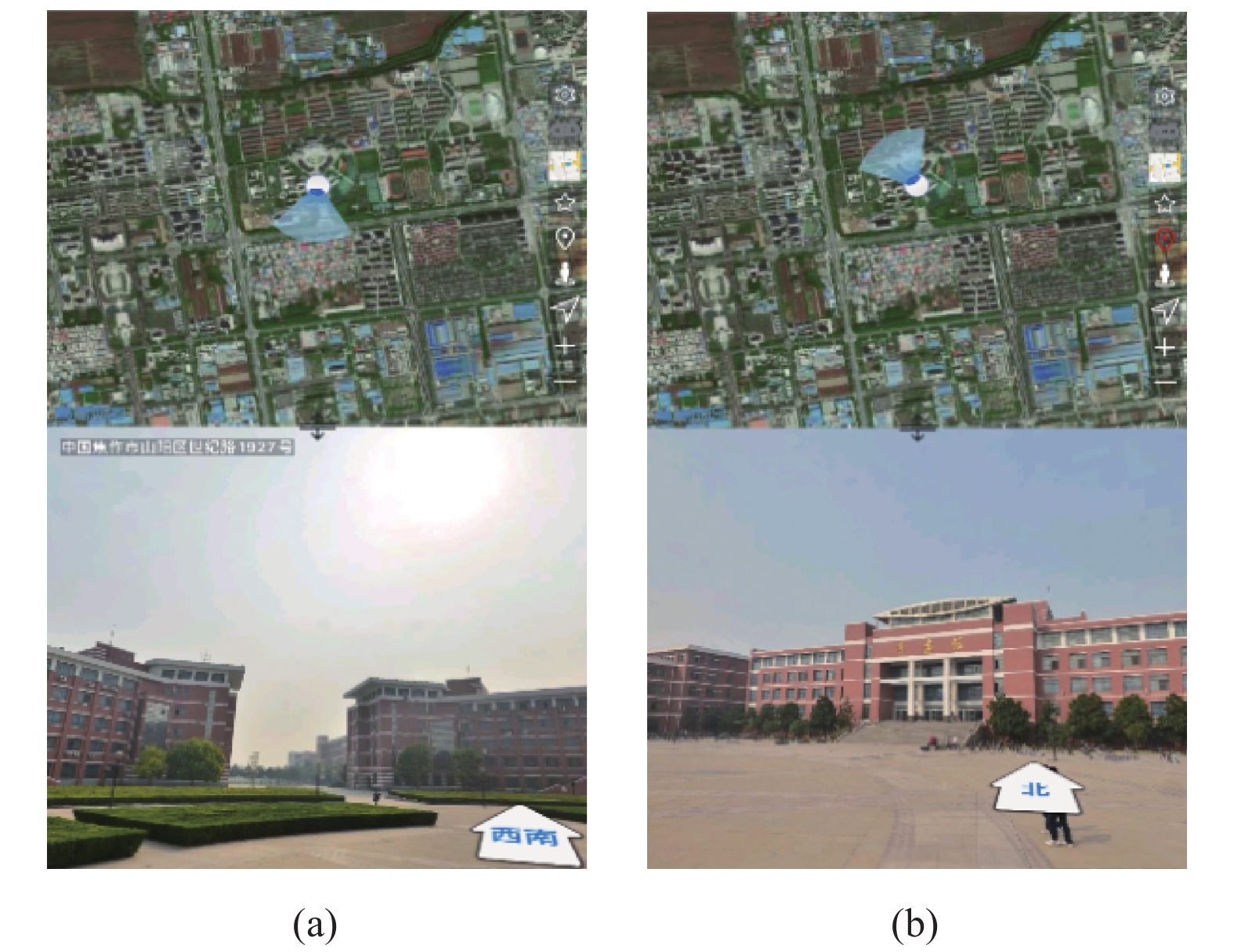
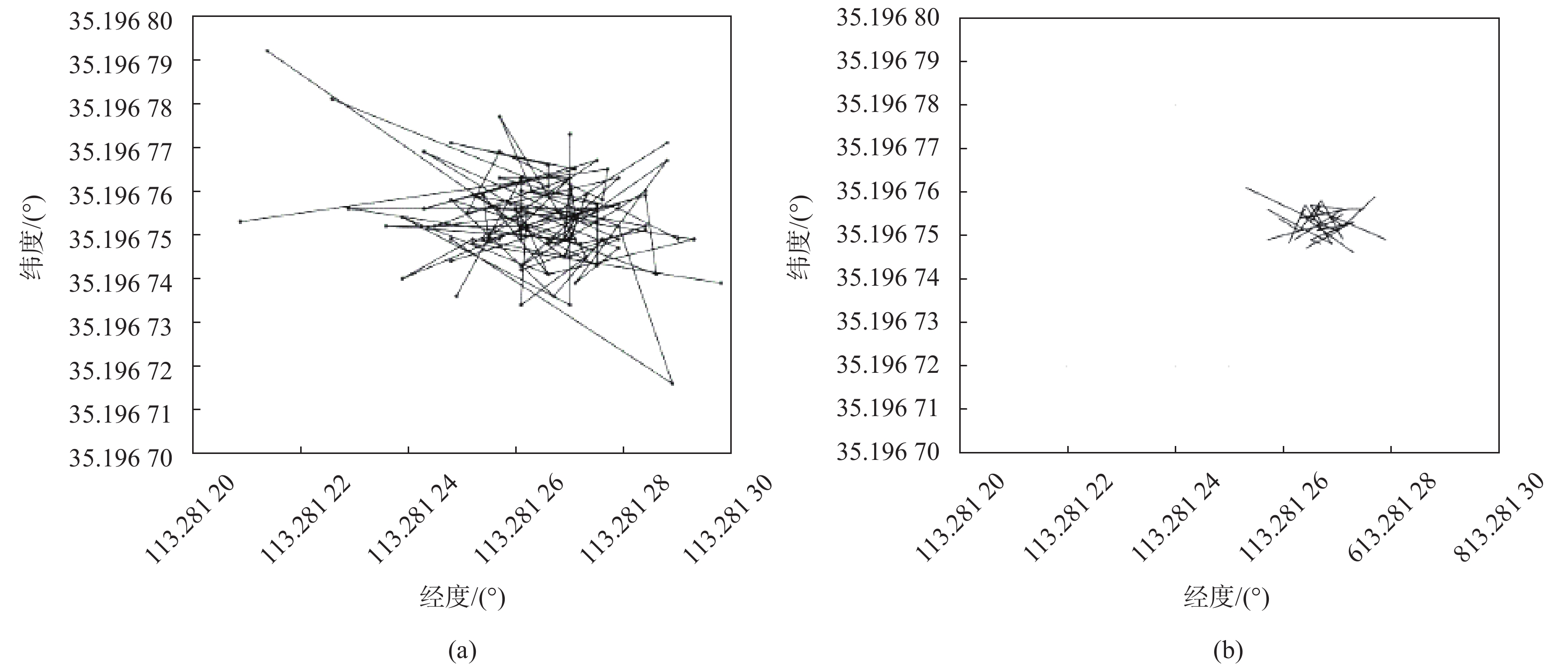
摘要: 实时获取智能移动终端的地理位置信息是增强现实(AR)实景智能导航系统实现的关键,为了提高智能终端GPS定位的精度,提出了一种基于卡尔曼滤波与改进的具有噪声的基于密度的聚类方法(DBSCAN)结合的GPS组合定位优化方法. 通过对GPS系统采集到的位置坐标数据进行卡尔曼滤波,去除较大的数据波动,控制定位误差范围,采用DBSCAN聚类算法进行分类去噪和二次聚类,对类中数据求得算术均值和类间数据总数进行加权求重心,确定位置坐标. 实验结果表明,提出的算法能有效提高GPS单点定位精度,减少定位误差,同时很好地满足了AR实景智能导航系统实时性和鲁棒性的要求.
-
关键词:
- GPS /
- 定位精度 /
- 卡尔曼滤波 /
- 具有噪声的基于密度的聚类方法(DBSCAN) /
- 联合定位
Abstract: Real-time acquisition of geographic location information of smart mobile terminals is the key to the realization of an augmented reality (AR) real-scene smart navigation system. In order to improve the accuracy of GPS positioning for smart terminals, a GPS combined positioning optimization method based on Kalman filtering and improved DBSCAN clustering algorithm is proposed. Kalman filtering is performed on the position coordinate data collected by the GPS system to remove large data fluctuations and control the positioning error range. Using DBSCAN clustering algorithm for classification denoising and secondary clustering, the arithmetic mean value of the data in the class and the total number of data between the classes are weighted to find the center of gravity, and the position coordinates are determined. The experimental results show that the proposed algorithm can effectively improve the GPS single-point positioning accuracy, reduce positioning errors, and at the same time well meet the real-time and robustness requirements of the AR real-world intelligent navigation system.-
Key words:
- GPS /
- positioning accuracy /
- Kalman filter /
- DBSCAN clustering /
- combined positioning
-
表 1 华为畅享10手机参数
手机参数 值 CPU 海思 麒麟 710F 操作系统 EMUI 9.1(基于Android 9.0) 运行内存 4 GB 处理器 八核 网络 4G全网通 导航 GPS导航,A-GPS技术,GLONASS导航,北斗系统  下载: 导出CSV
下载: 导出CSV
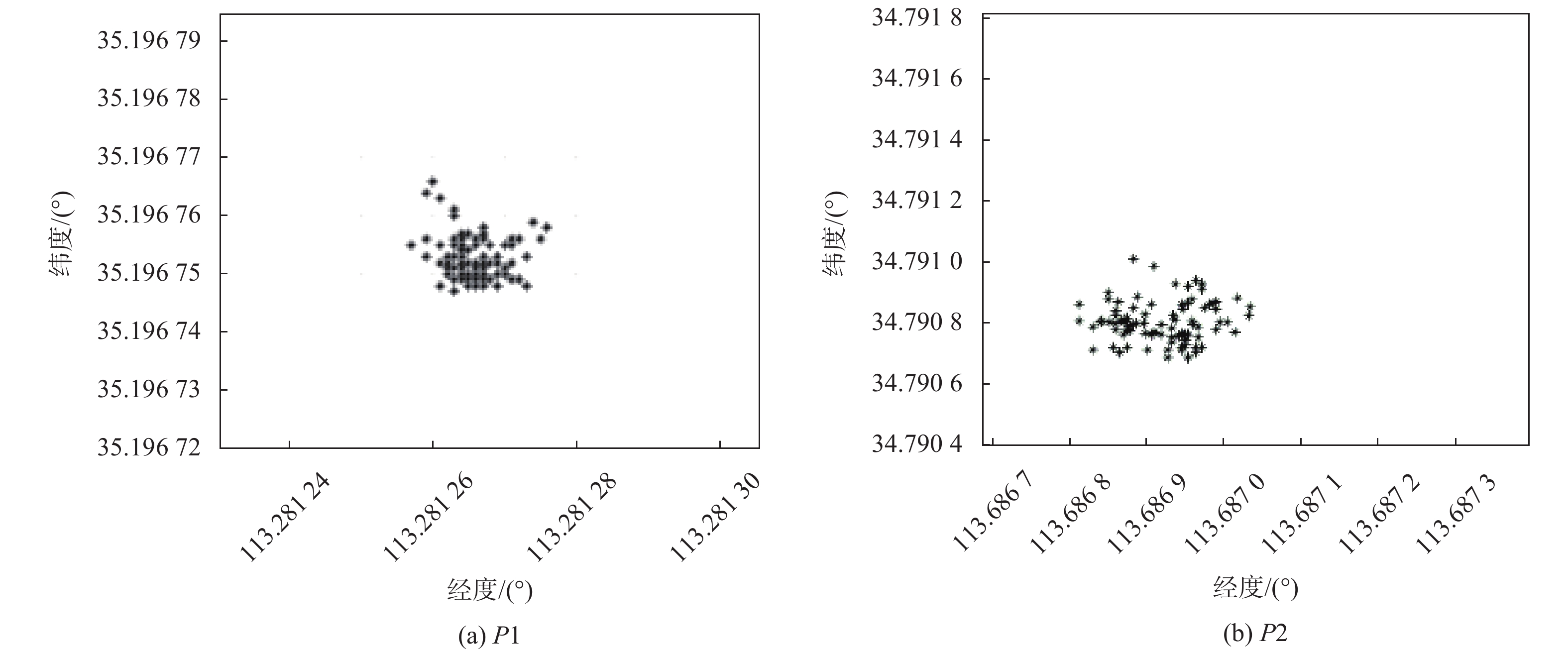
表 2 P1和P2定位误差的比较
坐标 经度/(°) 纬度/(°) 误差/m P1测量坐标 113.281261 35.196750 2.1 P1真实坐标 113.281287 35.196745 P2测量坐标 113.686919 34.790771 3.4 P2真实坐标 113.686948 34.790817
下载: 导出CSV
-
[1] 高九连. 基于物联网危险品定位追踪系统设计[J]. 电子技术与软件工程, 2017(21): 78 [2] 郝晓平, 黄晓雯, 高志刚, 等. 无人机技术在油气管道巡护中的应用[J]. 油气储运, 2019(8): 955-960. [3] 机器人导游“导出”智慧旅游[N/OL]. 山西日报. (2019-05-13) [2020-10-08]. http://epaper.sxrb.com/shtml/sxrb/20190513/319414.shtml. [4] 任超, 吴伟, 彭家頔, 等. 基于GPSOne技术的智能手机定位精度及可靠性研究[J]. 测绘通报, 2012(2): 54-55, 84. [5] ZANDBERGEN P A. Accuracy of iPhone locations: a comparison of assisted GPS, WiFi and cellular positioning[J]. Transactions in GIS, 2009, 13(S1): 5-25. DOI: 10.111/j.1467-9671.2009.01152.x. [6] ZANDBERGEN P A, BARBEAU S J. Positional accuracy of assisted GPS data from high-sensitivity GPS-enabled mobile phones[J]. Journal of navigation, 2011, 64(3): 381-399. DOI: 10.1017/S0373463311000051. [7] 杜晓辉, 任章. 基于卡尔曼滤波的 GPS 静态定位精度分析[J]. 全球定位系统, 2008, 33(5): 47-51. DOI: 10.3969/j.issn.1008-9268.2008.05.012 [8] 刘志忠, 王雄, 刘超, 等. GPS单点定位精度优化方法研究[J]. 机械与电子, 2010(8): 14-16. DOI: 10.3969/j.issn.1001-2257.2010.08.004 [9] 刘胜, 张青春, 张兰勇. 聚类算法的GPS静态单点定位方法[J]. 哈尔滨工业大学学报, 2012, 44(11): 71-74. DOI: 10.11918/j.issn.0367-6234.2012.11.014 [10] 崔少星. 基于 Android 手机平台和增强现实的自助导游系统的设计与实现[D]. 西安: 西北大学, 2015. [11] 袁阳, 周汝雁, 张云. 扩展卡尔曼滤波的安卓手机定位算法研究[J]. 全球定位系统, 2020, 45(2): 105-111. [12] 刘云翔, 陈斌, 林涛, 等. 基于优化的ST-DBSCAN算法的智能手机及车辆定位模型[J]. 现代电子技术, 2019, 42(21): 134-140. [13] 张科泽, 杨鹤标, 沈项军, 等. 基于节点数据密度的分布式K-means聚类算法研究[J]. 计算机应用研究, 2011, 28(10): 3643-3645, 3655. DOI: 10.3969/j.issn.1001-3695.2011.10.009 [14] 李文杰, 闫世强, 蒋莹, 等. 自适应确定DBSCAN算法参数的算法研究[J]. 计算机工程与应用, 2019, 55(5): 1-7, 148. DOI: 10.3778/j.issn.1002-8331.1809-0018 [15] 郭树人, 刘成, 高为广, 等. 卫星导航增强系统建设与发展[J]. 全球定位系统, 2019, 44(2): 1-12. [16] 彭勇, 陈俞强. 基于改进卡尔曼滤波的北斗GPS联合定位算法[J]. 计算技术与自动化, 2018, 37(2): 59-62. [17] ZHAO Q, PAN S G, GAO C F, et al. BDS/GPS/LEO triple-frequency uncombined precise point positioning and its performance in harsh environments[J]. Measurement, 2020 (151). DOI: 10.1016/j.measurement.2019.107216. [18] 高晓, 库新勃, 白皓, 等. 基于GPS/BDS组合系统实现航测无人机动态定位[J]. 全球定位系统, 2019, 44(3): 105-110. -



 点击查看大图
点击查看大图
图(10) / 表(3)
计量
- 文章访问数: 1108
- HTML全文浏览量: 175
- PDF下载量: 70
- 被引次数: 0
