
Preliminary analysis of atmospheric water vapor detection performance based on BDS-3
-
摘要: 对我国刚布署完成的北斗三号卫星导航系统(BDS-3)的大气水汽探测性能作初步分析可更好地发挥BDS-3的气象探测潜能. 采用全球不同位置的台站进行几种手段的对比,探测结果具有代表性和说服力. 研究结果表明:将BDS-3/PWV(大气可降水量)与GPS/PWV对比,平均偏差(BIAS)优于1.0 mm,均方根误差(RMSE)优于2.0 mm,相关系数均在94%以上;BDS-3/PWV与GPS/PWV求差取绝对值后的平均值(MEAN)为1.1 mm,比北斗二号(BDS-2)降低了71%;BDS-3/PWV与GPS/PWV的RMSE为1.4 mm,比BDS-2降低了63%. 将BDS-3/PWV与ERA5/PWV对比, BIAS优于2.9 mm,RMSE优于2.8 mm,相关系数均在92%以上,BDS-3/PWV与ERA5/PWV的MEAN为2.1 mm,比BDS-2降低了48%;BDS-3/PWV与ERA5/PWV的RMSE为1.6 mm,比BDS-2降低了57%. BDS-3探测水汽性能明显优于BDS-2;BDS-3水汽探测结果与GPS、ERA5再分析资料有很好的一致性.
-
关键词:
- 北斗三号(BDS-3) /
- GPS /
- ERA5 /
- 大气可降水量(PWV) /
- 水汽探测
Abstract: The preliminary analysis of the atmospheric water vapor detection performance of Beidou-3 global satellite navigation system (BDS-3), which has just been deployed in China, can make better use of the meteorological detection potential of BDS-3. In this paper several methods are compared using data from diffent stations around the world. The results are representative and convincing. The results of the study showed, comparing BDS-3/PWV with GPS/PWV, the average deviation (BIAS) was preferable to 1.0 mm, the root mean square error (RMSE) was better than 2.0 mm, and the correlation coefficients were all above 94%; The mean of the absolute values of the difference between of BDS-3/PWV and GPS/PWV (MEAN) was 1.1 mm, which was 71% lower than BDS-2; The RMSE of BDS-3/PWV and GPS/PWV was 1.4 mm, which was 63% lower than BDS-2. Comparing BDS-3/PWV with ERA5/PWV, BIAS was preferable to 2.9 mm, RMSE was better than 2.8 mm, and the correlation coefficient was above 92%. The MEAN of BDS-3/PWV and ERA5/PWV was 2.1 mm, which was better than BDS-2 reduced by 48%; The RMSE of BDS-3/PWV and ERA5/PWV was 1.6 mm, which was 57% lower than BDS-2. The water vapor detection performance of BDS-3 was much better than BDS-2, which was in good agreement with GPS and ERA5 water vapor detection results.-
Keywords:
- BDS-3 /
- GPS /
- ERA5 /
- precipitable water vapor /
- water vapor detection
-
0. 引 言
水汽是大气中的水蒸气,它是大气中活跃多变的成分,含量很少,分布极不均匀,时空变化很大. 水汽影响着能量输送、辐射平衡、云的形成和降水,它潜能的释放对大气的垂直稳定度、恶劣天气的形成有显著的影响[1]. 水汽随时空变化对气象预报有重要的指示意义,特别是对水平范围100 km左右、生命周期只有几个小时的中小尺度灾害性天气的监视和预报尤为重要. 因此,有效地获取高精度、高时空分辨率、全天时的大气水汽信息对于中小尺度灾害性天气的预报和防灾减灾具有重要作用[2].
自GPS气象学技术首次发布[3]以来,GPS已发展成为研究大气可降水量(PWV)的有力工具. 许多研究表明,由GPS技术得到的PWV可以达到1~3 mm甚至更高的精度[4-7]. 全球卫星导航系统(GNSS)是20世纪对人类生活具有广泛重大影响的空间技术之一,目前已被广泛应用于大气、海洋、空间探测等领域,且对这些领域产生了深刻影响[8]. GNSS探测水汽技术具有实时连续性、不受天气影响、价格经济和精度高等特点,为水汽探测提供了一种新的手段,是常规水汽探测手段的有力补充[9-10].
我国自主建设的北斗卫星导航系统(BDS)是继美国的GPS、俄罗斯的GLONASS和欧洲的Galileo之后的第四个卫星导航系统,整个系统在2020年形成全球覆盖能力. 众多学者对BDS的系统性能、观测质量、模型精度等进行了分析评估[11-16].
至今,北斗三号(BDS-3)星座部署已经完成. 基于BDS-3卫星探测PWV的精度对BDS应用于全球水汽探测至关重要. 本文基于MGEX(Multi-GNSS Experiment)观测数据,给出了BDS-3水汽探测性能的初步分析结果.
1. 地基GNSS大气水汽探测原理
从卫星到地面接收机的GNSS信号在穿过电离层和中性大气层时会发生延迟. 电离层为色散特质,通过组合不同频率的观测值可以得到很好的消除. 大多数中性大气层延迟是由对流层引起的,因此中性大气延迟层又称为对流层延迟.
1.1 天顶总延迟
对流层延迟信息是GNSS气象学中的主要研究对象. 在GNSS数据处理中,为了避免秩亏问题,通常将沿信号斜路径的对流层延迟映射到天顶方向[17],即天顶总延迟(ZTD). ZTD包含两部分:第一部分是由干燥空气所引起的延迟,称为天顶静力学延迟(ZHD);另外一部分是由大气中的水汽所引起的延迟,称为天顶湿延迟(ZWD). 三者的数学关系表达为
$$ ZTD=ZHD+ZWD.$$ (1) 1.2 ZHD和ZWD的计算
ZHD可以由经验模型Saastamonien模型[18]、Hopfield模型[19]准确估算. 本文使用Saastamonien模型对ZHD进行计算,数学模型可表示为
$$\left\{ \begin{aligned} & ZHD = \left[ {\left( {2.277\;9 \pm 0.002\;4} \right){\rm{m}} \cdot {\rm{hPa}}{^{ - 1}}} \right] \times \dfrac{{{p_{\rm{s}}}}}{{f\left( {\theta ,H} \right)}}\\ & f\left( {\theta ,H} \right) = 1 - 0.002\;66 \cdot \cos (2\theta) - 0.000\;28 \cdot H \end{aligned} \right..$$ (2) 式中:
${P_{\rm{s}}}$ 为测站地面气压,hPa;H为测站高程,km;$\theta $ 为测站地理纬度.ZWD主要是由大气中的水汽引起,很难对其进行准确建模. 在GNSS气象学中,通常从估算的ZTD中减去ZHD来获取ZWD,如下所示:
$$ ZWD=ZTD-ZHD.$$ (3) 1.3 PWV的计算
计算得到的ZWD可由水汽转换系数转换为PWV,如下式所示:
$$ PWV=\varPi \cdot ZWD.$$ (4) 式中,
$\varPi$ 为水汽转换系数,由下式计算:$$ \varPi =\frac{{\rm{10}}^{\rm{6}}}{{\rho }_{\rm{w}}{R}_{{\rm{v}}}\left({k}_{2}+{k}_{3}/{T}_{{\rm{m}}}\right)}.$$ (5) 式中:
${T_{\rm{m}}}$ 为加权平均温度;${\rho _{\rm{w}}}$ 是液态水密度;${R_{\rm{v}}}$ 是水汽的比气体常数;${k_2}$ 、${k_3}$ 是大气折射率实验常数,分别为16.52 K/hPa、3.776×105 K2/hPa.2. 实验数据及处理策略
2.1 数据来源
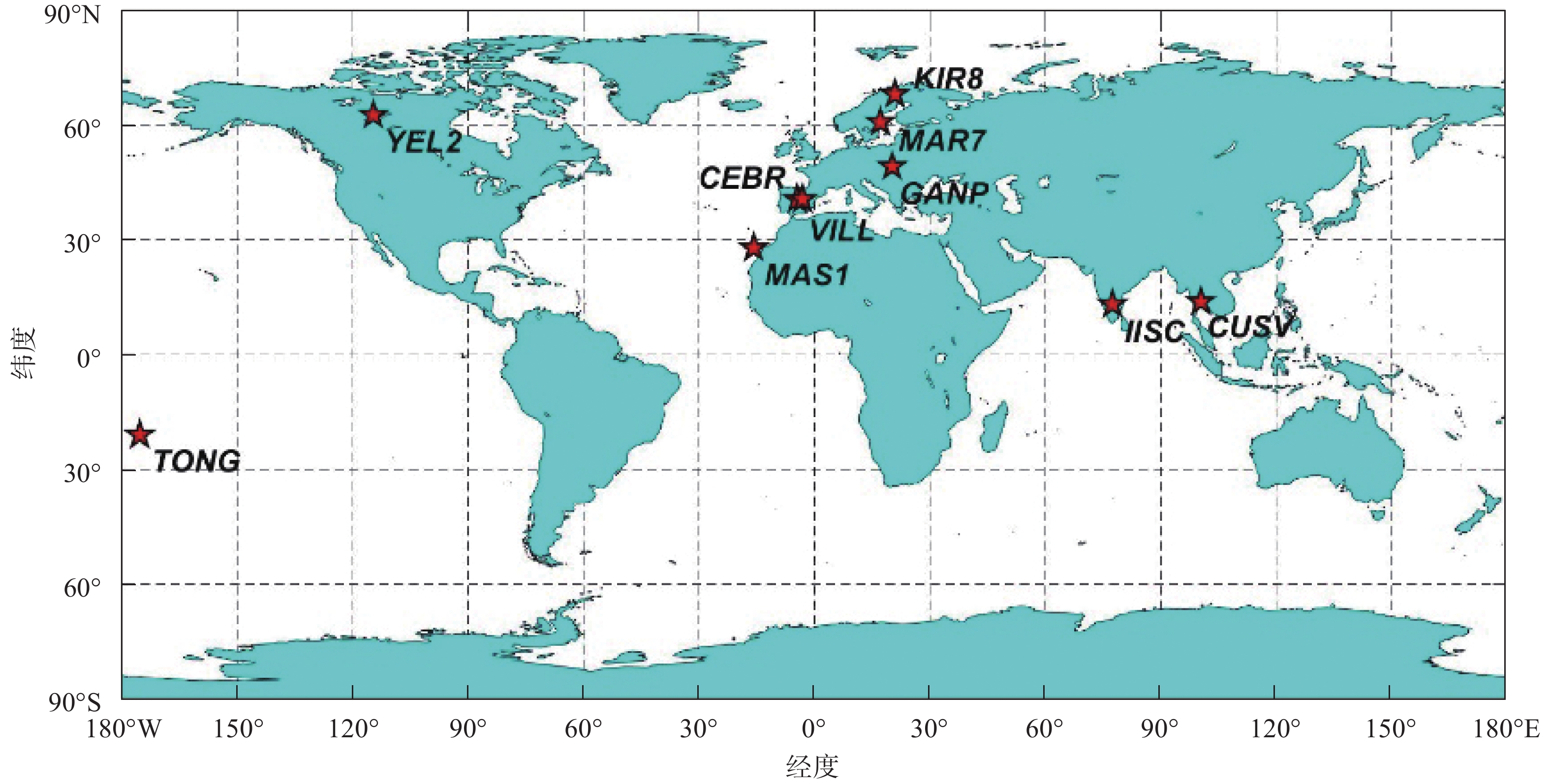
本文采用MGEX发布的CEBR、CUSV、GANP、IISC、KIR8、MAR7、MAS1、TONG、VILL、YEL2 10个台站的观测数据,统计分析的时间段为2020年年积日015—029. 图1给出了选用的10个MGEX站的位置分布图. 各站在同一时刻北斗二号(BDS-2)、BDS-3至少可视卫星数及观测值类型情况如可视卫星数及观测值类型情况如表1所示.
表 1 MGEX站相关信息MGEX站 观测值类型 同一时刻BDS-2、BDS-3至少可视卫星数 CEBR C1P L1P C5P L5P C2I L2I C7I L7I C6I L6I 5、6 CUSV C2I L2I C6I L6I C7I L7I 13、7 GANP C5X L5X C2I C7I L2I L7I L6I C6I 8、8 IISC C2I L2I C6I L6I C7I L7I 11、5 KIR8 C5X L5X C2I C7I L2I L7I L6I C6I 9、10 MAR7 C5X L5X C2I C7I L2I L7I L6I C6I 6、8 MAS1 C1P L1P C5P L5P C2I L2I C7I L7I C6I L6I 4、6 TONG C2I L2I C6I L6I C7I L7I 5、7 VILL C1P L1P C5P L5P C2I L2I C7I L7I C6I L6I 6、6 YEL2 C2I L2I C6I L6I C7I L7I 4、8 2.2 数据处理策略
利用GAMIT V10.71软件进行GPS/BDS数据处理,采用双频消电离层组合方式,并且加以误差修正,具体包括地球自转修正、 潮汐修正、相对论效应修正等,对流层误差模型采用估计最优的Saastamoninen模型估算天顶延迟参数,并引入全球大气映射函数模型文件map.grid,采用分段线性的方法估算对流层天顶延迟. GAMIT软件解算时采用的解算策略具体参数设置如表2所示. GPS和BDS卫星星历采用武汉大学国际GNSS服务(IGS)数据中心发布的WUM 15 min最终精密星历文件(下载地址:ftp://igs.gnsswhu.cn/pub/gnss/products/mgex/).
表 2 数据解算策略控制选项 控制参数 轨道处理策略 BASELINE 观测值使用 LC_AUTCLN 分析类型(迭代) 1-ITER 天顶延迟参数 25 高度截止角 10° 海潮模型 otl_FES2004.grid 对流层误差模型 Saastamoninen 映射函数模型 GMF 精密星历 WUM 其 他 default 2.3 ERA5再分析资料获取
ERA5[20]是第五代ECMWF全球气候的大气再分析资料. 该资料是基于ECMWF综合预报系统CY41R2的4D-Var数据同化产生的,提供基本气候变量(ECVs)的格点气候数据记录(CDRs),其内容包括大气参数估计(如不同高度上的气温、压力和可降水量)和地表参数估计(如降水、海冰、土壤湿度和地表温度). ERA5大气数据详细说明如表3所示.
表 3 ERA5大气资料说明参数 取值 数据类型 格网模型 水平覆盖率 全球 水平分辨率 0.25°$ \times $0.25° 时间覆盖率 1979—至今 时间分辨率 每小时 文件格式 GRIB/NetCDF 更新频率 每天 3. BDS-3水汽探测分析
为了分析BDS-3水汽探测性能,将BDS-2、BDS-3分别与GPS、ERA5再分析资料进行对比分析,以下分别用BDS-2/PWV、BDS-3/PWV、GPS/PWV、ERA5/PWV表示相应的水汽结果.
3.1 BDS-3/PWV与GPS/PWV对比分析
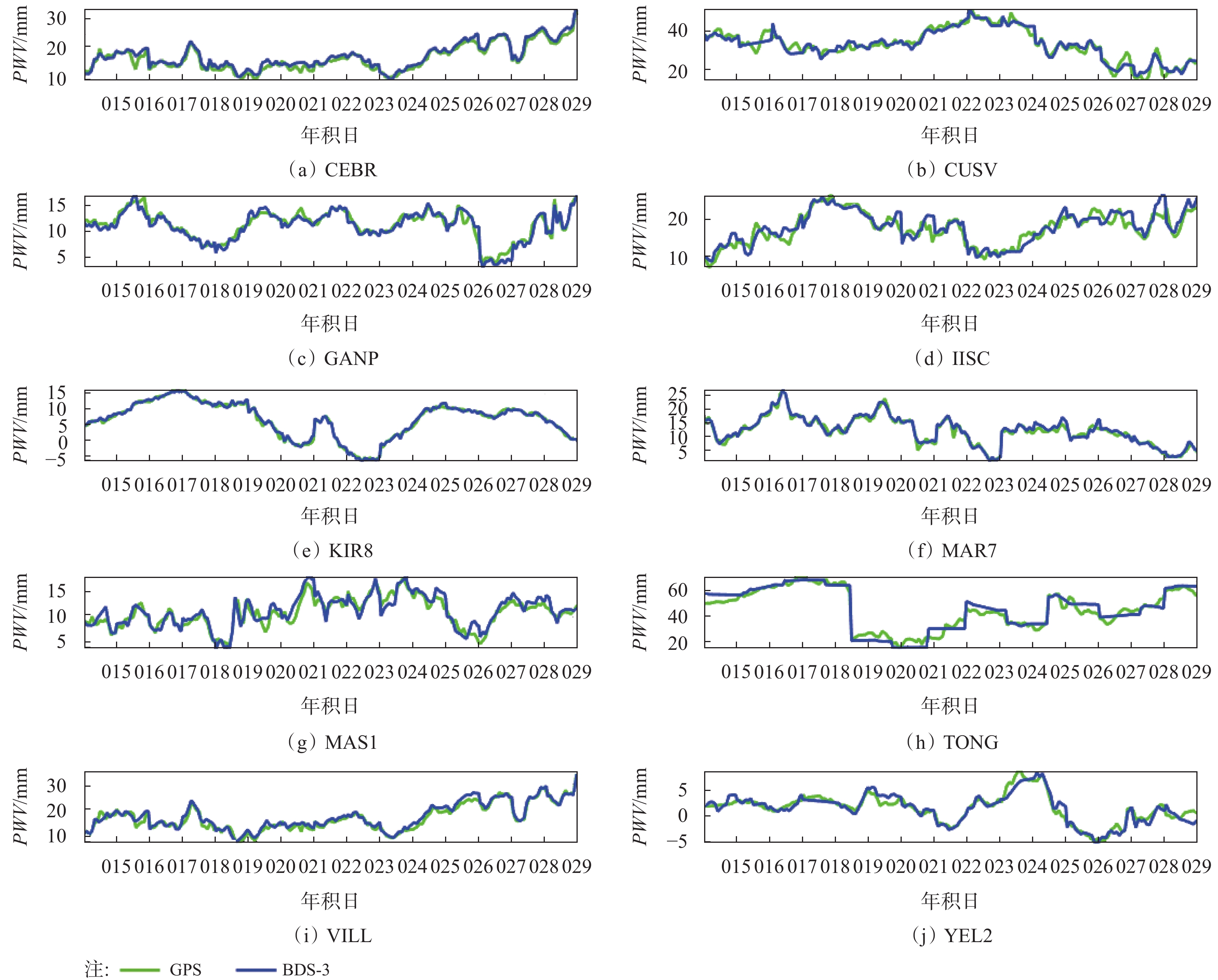
根据2.2节的数据解算策略,对所选10个MGEX站BDS-3、BDS-2和GPS的观测数据分别进行处理,得到各站相应的PWV,图2(a)~图2(j)给出了各站2020年年积日015—029 共15 d(GAMIT软件绘制输出有连续水汽值的天数,下文同)BDS-3/PWV和GPS/PWV时间序列图. 由图2可知,BDS-3和GPS两系统水汽探测结果具有很好的一致性.
为更好地比较BDS-3与GPS水汽探测的结果,图3(a)~图3(j)给出了各站2020年年积日015—029共15 d BDS-3与GPS探测水汽差值的时间序列图. 表4给出了各站BDS-3/PWV与GPS/PWV的平均偏差(BIAS)、均方根误差( RMSE)、相关系数r的统计结果(大于2倍中误差的数据不在统计范围内).
由图3可以看出,BDS-3与GPS两系统的水汽探测结果离散程度较小;从表4中可看出,各站BDS-3/PWV与GPS/PWV的BIAS均优于1.0 mm,RMSE均优于2.0 mm (除TONG站),相关系数均在94%以上,总体来说,BDS-3探测水汽性能与GPS保持很好的一致性. TONG站RMSE偏大可能与其所处地理环境有关,原因待查.
3.2 BDS-2/PWV与GPS/PWV对比分析
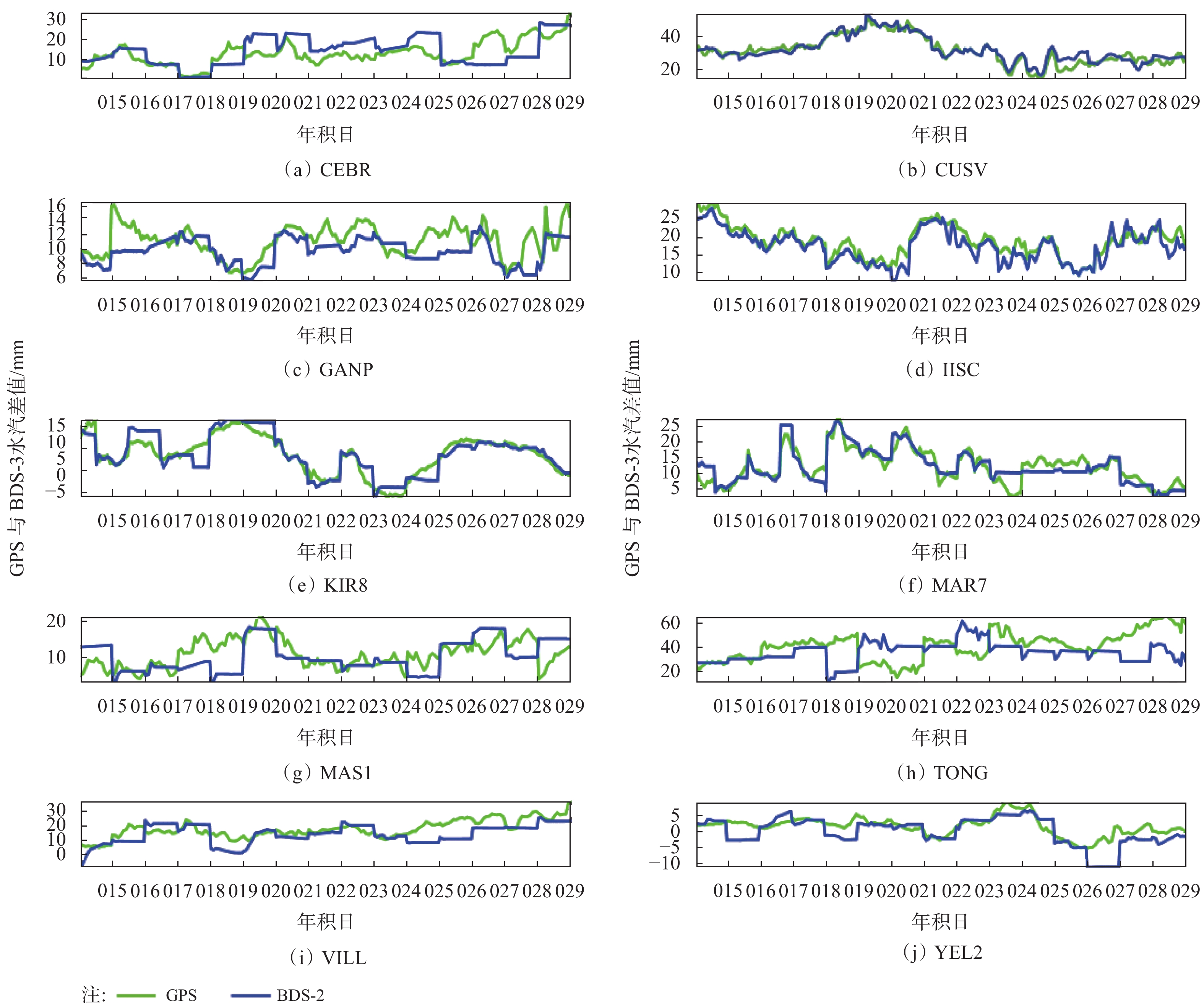
图4(a)~图4(j)给出了各站2020年年积日015—029共15 d BDS-2/PWV与GPS/PWV时间序列图,纵坐标表示PWV,单位为mm.
由图4可知,对于非亚太地区的台站,虽在同一时段BDS-2可视卫星数达到4颗及4颗以上,但BDS-2探测水汽结果与GPS系统仍相差较大,这与BDS-2是区域卫星导航系统,向亚太地区提供服务有关. 为更好地比较BDS-2/PWV与GPS/PWV,对各个站的平均偏差BIAS、RMSE、相关系数r进行统计(大于2倍中误差的数据不在统计范围内),如表5所示.
由表5中可看出,对于亚太地区的CUSV、IISC两个站,BDS-2/PWV与GPS/PWV一致性较好,BIAS均优于1.4 mm,RMSE优于2.9 mm,亚太周边区域的台站相关系数均在90%以上;对于非亚太区域的台站,BDS-2水汽探测精度较差.
表 4 BDS-3/PWV与GPS/PWV的BIAS、RMSE、r统计MGEX站 BIAS/mm RMSE/mm r/% CEBR −0.80 1.18 98.99 CUSV 0.10 1.93 96.49 GANP 0.11 0.73 98.87 IISC −0.28 1.80 94.28 KIR8 −0.12 0.65 99.25 MAR7 −0.26 0.97 98.38 MAS1 −0.38 1.21 94.31 TONG −0.79 3.69 96.90 VILL −0.56 1.20 98.44 YEL2 0.06 0.87 95.41 3.3 BDS-3/PWV与BDS-2/PWV对比分析
为了更好地分析BDS-3探测水汽性能,绘制了各站BDS-3/PWV、BDS-2/PWV分别与GPS/PWV求差取绝对值后的平均值(MEAN)、RMSE分布情况,如图5所示.
由图5可以看出,各站BDS-2/PWV的MEAN、RMSE均大于BDS-3/PWV,在非亚太地区的台站尤为明显;BDS-3的MEAN、RMSE均优于BDS-2,表6给出了各站BDS-3/PWV、BDS-2/PWV分别与GPS/PWV的MEAN、RMSE统计情况,其中ALL表示所有MGEX站BDS-3/PWV或BDS-2/PWV与GPS/PWV求差取绝对值后的平均值MEAN、RMSE.
表 5 BDS-2/PWV与GPS/PWV的BIAS、RMSE、r统计MGEX站 BIAS/mm RMSE/mm r/% CEBR −1.65 6.17 44.42 CUSV −0.42 2.85 92.30 GANP 0.97 2.37 88.79 IISC 1.38 2.48 90.01 KIR8 0.07 2.77 87.86 MAR7 −0.04 2.31 87.96 MAS1 0.76 3.73 57.10 TONG 4.57 7.02 15.71 VILL 2.59 6.22 54.95 YEL2 1.16 2.83 76.89 表 6 BDS-3/PWV、BDS-2/PWV分别与GPS/PWV的MEAN和RMSE统计MGEX站 BDS-2/PWV BDS-3/PWV MEAN/mm RMSE/mm MEAN/mm RMSE/mm CEBR 5.31 6.17 0.96 1.18 CUSV 2.13 2.85 1.41 1.93 GANP 1.83 2.37 0.53 0.73 IISC 1.94 2.48 1.30 1.80 KIR8 2.02 2.77 0.49 0.65 MAR7 2.06 2.31 0.69 0.97 MAS1 3.14 3.73 0.92 1.21 TONG 11.84 7.02 2.78 3.69 VILL 4.78 6.22 1.00 1.20 YEL2 1.96 2.83 0.66 0.87 ALL 3.70 3.90 1.10 1.40 综合图5和表6可知,BDS-3探测水汽性能明显优于BDS-2;由表6可知,BDS-3/PWV与GPS/PWV的MEAN为1.1 mm,比BDS-2降低了71%;BDS-3/PWV与GPS/PWV的RMSE为1.4 mm,比BDS-2降低了63%.
3.4 BDS-3/PWV、BDS-2/PWV与ERA5/PWV对比分析
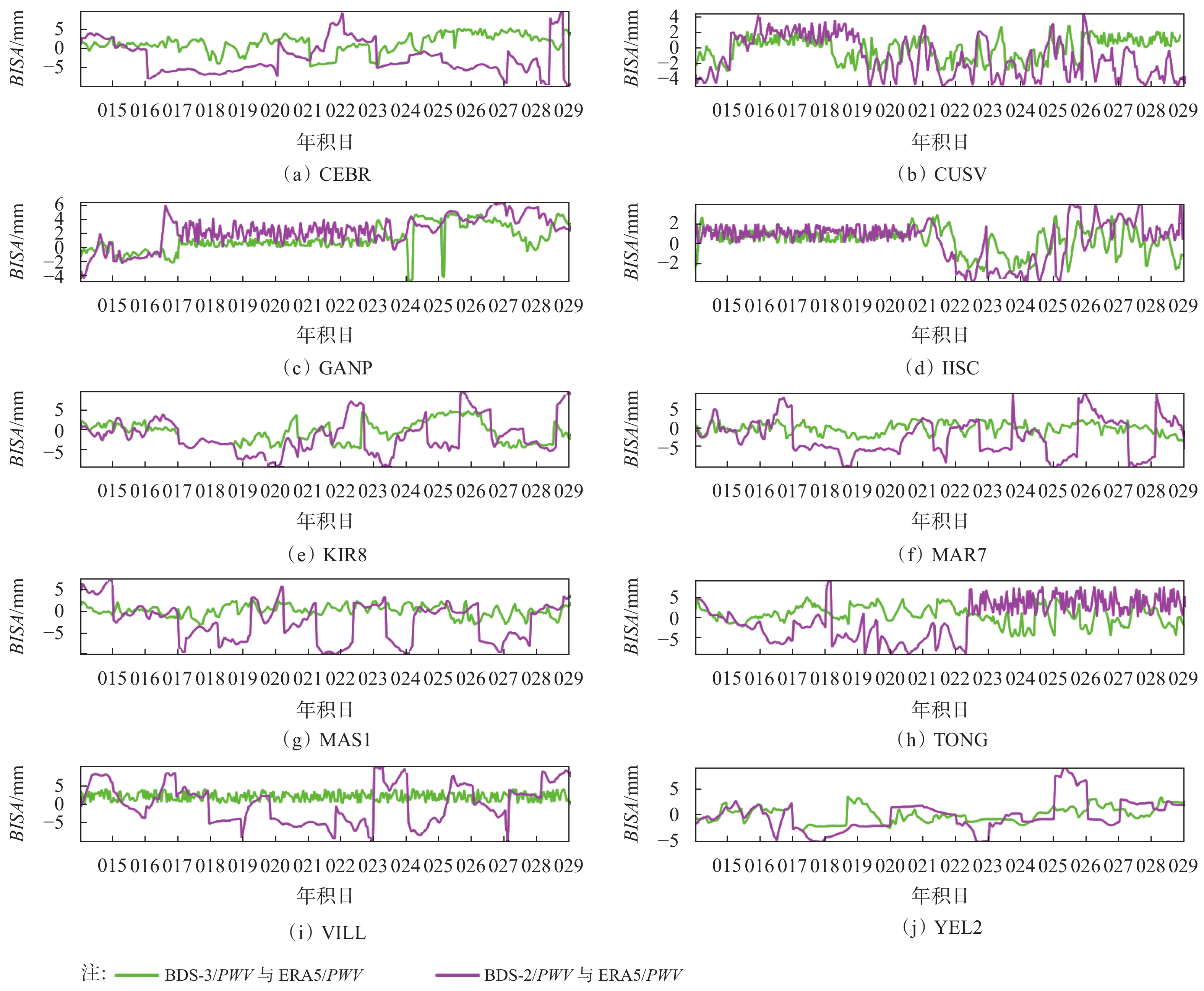
为了进一步分析BDS-3探测水汽的性能,将BDS-3/PWV、BDS-2/PWV与ERA5/PWV进行了对比,图6给出了各站BDS-3/PWV、BDS-2/PWV 2020年年积日015—029共15 d分别与ERA5/PWV的BIAS时间序列. 表7给出了各站BDS-3/PWV、BDS-2/PWV分别与ERA5/PWV求差取绝对值后的MEAN、RMSE和r的统计信息,其中BDS-3_ALL和BDS-2_ALL分别表示所有MGEX站BDS-3/PWV、BDS-2/PWV与ERA5/PWV求差取绝对值的MEAN、RMSE.
由图6可知,BDS-3/PWV与ERA5/PWV离散程度最小,BDS-2/PWV与ERA5/PWV离散程度最大,这与BDS-3卫星信号跟踪质量和观测值精度的提高、不存在二代卫星星端多路径误差相关[21];另外BDS-3卫星数量的增加,改善了几何图形结构,提高了观测数据质量[22]. 从表7可以看出,各站BDS-3/PWV与ERA5/PWV有很好的一致性,BIAS优于2.9 mm,RMSE优于2.8 mm,相关系数在92%以上;BDS-3_ALL的MEAN为2.1 mm,比BDS-2降低了48%;BDS-3_ALL的RMSE为1.6 mm,比BDS-2降低了57%. BDS-3水汽探测精度明显优于BDS-2.
表 7 BDS-3/PWV、BDS-2/PWV分别与ERA5/PWV的MEAN、RMSE和r统计MGEX站 对比方式 样本量 MEAN/mm RMSE/mm r/% CEBR BDS-3与ERA5 571 2.39 2.84 96 BDS-2与ERA5 530 4.86 5.54 54 CUSV BDS-3与ERA5 383 2.36 1.66 98 BDS-2与ERA5 418 3.98 2.64 91 GANP BDS-3与ERA5 550 2.93 2.64 92 BDS-2与ERA5 543 4.22 3.58 75 IISC BDS-3与ERA5 566 1.66 1.46 94 BDS-2与ERA5 297 3.47 2.00 99 KIR8 BDS-3与ERA5 581 2.58 1.66 93 BDS-2与ERA5 527 4.11 2.99 56 MAR7 BDS-3与ERA5 587 2.16 1.55 93 BDS-2与ERA5 592 3.97 2.61 76 MAS1 BDS-3与ERA5 574 1.45 1.39 92 BDS-2与ERA5 488 3.99 2.96 63 TONG BDS-3与ERA5 361 2.06 1.70 97 BDS-2与ERA5 238 4.40 7.12 40 VILL BDS-3与ERA5 423 2.81 1.87 98 BDS-2与ERA5 458 4.58 4.90 66 YEL2 BDS-3与ERA5 622 1.73 1.31 92 BDS-2与ERA5 593 3.16 1.61 63 ALL BDS-3_ALL 2.10 1.60 BDS-2_ALL 4.00 3.70 4. 结束语
本文选取MGEX发布的10个站2020年年积日015—029共15 d的观测数据,将BDS-2/PWV、BDS-3/PWV分别与GPS/PWV、ERA5/PWV对比分析,结果表明:
1)BDS-3/PWV与GPS/PWV对比,BIAS优于1.0 mm,RMSE优于2.0 mm,相关系数在94%以上. BDS-3/PWV与GPS/PWV MEAN为1.1 mm,比BDS-2降低了71%;BDS-3/PWV与GPS/PWV的RMSE为1.4 mm,比BDS-2降低了63%;
2)BDS-3/PWV与ERA5/PWV对比,BIAS优于2.9 mm,RMSE优于2.8 mm,相关系数均在92%以上. BDS-3/PWV与ERA5/PWV MEAN为2.1 mm,比BDS-2降低了48%;BDS-3/PWV与ERA5/PWV的RMSE为1.6 mm,比BDS-2降低了57%.
3)BDS-3探测水汽性能明显优于BDS-2;BDS-3水汽探测结果与GPS、ERA5再分析资料有很好的一致性.
-
表 1 MGEX站相关信息
MGEX站 观测值类型 同一时刻BDS-2、BDS-3至少可视卫星数 CEBR C1P L1P C5P L5P C2I L2I C7I L7I C6I L6I 5、6 CUSV C2I L2I C6I L6I C7I L7I 13、7 GANP C5X L5X C2I C7I L2I L7I L6I C6I 8、8 IISC C2I L2I C6I L6I C7I L7I 11、5 KIR8 C5X L5X C2I C7I L2I L7I L6I C6I 9、10 MAR7 C5X L5X C2I C7I L2I L7I L6I C6I 6、8 MAS1 C1P L1P C5P L5P C2I L2I C7I L7I C6I L6I 4、6 TONG C2I L2I C6I L6I C7I L7I 5、7 VILL C1P L1P C5P L5P C2I L2I C7I L7I C6I L6I 6、6 YEL2 C2I L2I C6I L6I C7I L7I 4、8  下载: 导出CSV
下载: 导出CSV
表 2 数据解算策略
控制选项 控制参数 轨道处理策略 BASELINE 观测值使用 LC_AUTCLN 分析类型(迭代) 1-ITER 天顶延迟参数 25 高度截止角 10° 海潮模型 otl_FES2004.grid 对流层误差模型 Saastamoninen 映射函数模型 GMF 精密星历 WUM 其 他 default
下载: 导出CSV
表 3 ERA5大气资料说明
参数 取值 数据类型 格网模型 水平覆盖率 全球 水平分辨率 0.25°$ \times $0.25° 时间覆盖率 1979—至今 时间分辨率 每小时 文件格式 GRIB/NetCDF 更新频率 每天
下载: 导出CSV
表 4 BDS-3/PWV与GPS/PWV的BIAS、RMSE、r统计
MGEX站 BIAS/mm RMSE/mm r/% CEBR −0.80 1.18 98.99 CUSV 0.10 1.93 96.49 GANP 0.11 0.73 98.87 IISC −0.28 1.80 94.28 KIR8 −0.12 0.65 99.25 MAR7 −0.26 0.97 98.38 MAS1 −0.38 1.21 94.31 TONG −0.79 3.69 96.90 VILL −0.56 1.20 98.44 YEL2 0.06 0.87 95.41
下载: 导出CSV
表 5 BDS-2/PWV与GPS/PWV的BIAS、RMSE、r统计
MGEX站 BIAS/mm RMSE/mm r/% CEBR −1.65 6.17 44.42 CUSV −0.42 2.85 92.30 GANP 0.97 2.37 88.79 IISC 1.38 2.48 90.01 KIR8 0.07 2.77 87.86 MAR7 −0.04 2.31 87.96 MAS1 0.76 3.73 57.10 TONG 4.57 7.02 15.71 VILL 2.59 6.22 54.95 YEL2 1.16 2.83 76.89
下载: 导出CSV
表 6 BDS-3/PWV、BDS-2/PWV分别与GPS/PWV的MEAN和RMSE统计
MGEX站 BDS-2/PWV BDS-3/PWV MEAN/mm RMSE/mm MEAN/mm RMSE/mm CEBR 5.31 6.17 0.96 1.18 CUSV 2.13 2.85 1.41 1.93 GANP 1.83 2.37 0.53 0.73 IISC 1.94 2.48 1.30 1.80 KIR8 2.02 2.77 0.49 0.65 MAR7 2.06 2.31 0.69 0.97 MAS1 3.14 3.73 0.92 1.21 TONG 11.84 7.02 2.78 3.69 VILL 4.78 6.22 1.00 1.20 YEL2 1.96 2.83 0.66 0.87 ALL 3.70 3.90 1.10 1.40
下载: 导出CSV
表 7 BDS-3/PWV、BDS-2/PWV分别与ERA5/PWV的MEAN、RMSE和r统计
MGEX站 对比方式 样本量 MEAN/mm RMSE/mm r/% CEBR BDS-3与ERA5 571 2.39 2.84 96 BDS-2与ERA5 530 4.86 5.54 54 CUSV BDS-3与ERA5 383 2.36 1.66 98 BDS-2与ERA5 418 3.98 2.64 91 GANP BDS-3与ERA5 550 2.93 2.64 92 BDS-2与ERA5 543 4.22 3.58 75 IISC BDS-3与ERA5 566 1.66 1.46 94 BDS-2与ERA5 297 3.47 2.00 99 KIR8 BDS-3与ERA5 581 2.58 1.66 93 BDS-2与ERA5 527 4.11 2.99 56 MAR7 BDS-3与ERA5 587 2.16 1.55 93 BDS-2与ERA5 592 3.97 2.61 76 MAS1 BDS-3与ERA5 574 1.45 1.39 92 BDS-2与ERA5 488 3.99 2.96 63 TONG BDS-3与ERA5 361 2.06 1.70 97 BDS-2与ERA5 238 4.40 7.12 40 VILL BDS-3与ERA5 423 2.81 1.87 98 BDS-2与ERA5 458 4.58 4.90 66 YEL2 BDS-3与ERA5 622 1.73 1.31 92 BDS-2与ERA5 593 3.16 1.61 63 ALL BDS-3_ALL 2.10 1.60 BDS-2_ALL 4.00 3.70
下载: 导出CSV
-
[1] DAI A G, WANG J H, WARE R H, et al. Diurnal variation in water vapor over North America and its implications for sampling errors in radiosonde humidity[J]. Journal of geophysical research atmospheres, 2002, 107(D10): ACL-11. DOI: 10.1029/2001JD000642.
[2] 徐祥德, 陶诗言, 王继志, 等. 青藏高原—季风水汽输送“大三角扇型”影响域特征与中国区域旱涝异常的关系[J]. 气象学报, 2002(3): 257-266. [3] BEVIS M, BUSINGER S, HERRING T A, et al. GPS meteorology: remote sensing of atmospheric water vapor using the global positioning system[J]. Journal of geophysical research atmospheres, 1992, 97(D14): 15787-15807. DOI: 10.1029/92JD01517.
[4] ROCKEN C, WARE R, VAN HOVE T, et al. Sensing atmospheric water vapor with the global positioning system[J]. Geophysical research letters, 1993, 20(23): 2631-2634. DOI: 10.1029/93GL02935.
[5] BRAUN O, ROCKEN C, WARE R. Validation of line-of-sight water vapor measurements with GPS[J]. Radio science, 2001, 36(3): 459-472. DOI: 10.1029/2000RS002353.
[6] RAJA M K R V, GUTMAN S I, MCMILLIN J G, et al. The validation of AIRS retrievals of integrated precipitable water vapor using measurements from a network of ground-based gps receivers over the contiguous united states[J]. Journal of atmospheric and oceanic technology, 2008, 25(3): 416-428. DOI: 10.1175/2007JTECHA889.1.
[7] LEE S W, KOUBA J, SCHUTZ B, et al. Monitoring precipitable water vapor in real-time using global navigation satellite systems[J]. Journal of geodesy, 2013, 87(10): 923-934. DOI: 10.1007/s00190-013-0655-y.
[8] 施闯, 王海深, 曹云昌, 等. 基于北斗卫星的水汽探测性能分析[J]. 武汉大学学报(信息科学版), 2016, 41(3): 285-289. [9] EMARDSON T R, ELGERED G, JOHANSSON J M. Three months of continuous monitoring of atmospheric water vapor with a network of global positioning system receivers[J]. Journal of geophysical research, 1998, 103(D2): 1807-1820. https://agupubs.onlinelibrary.wiley.com/doi/abs/10.1029/97JD03015.
[10] BOCK O, FLAMANT C, RICHARD E, et al. Validation of precipitable water from ECMWF model analyses with GPS and radiosonde data during the MAP SOP[J]. Quarterly journal of the royal meteorological society, 2005, 131(612): 3013-3036. DOI: 10.1256/qj.05.27.
[11] 高为广, 苏牡丹, 李军正, 等. 北斗卫星导航系统试运行服务性能评估[J]. 武汉大学学报(信息科学版), 2012, 37(11): 1352-1355. [12] 张强, 赵齐乐, 章红平, 等. 北斗卫星导航系统Klobucha模型精度评估[J]. 武汉大学学报(信息科学版), 2014, 39(2): 142-146. [13] 肖乐杰, 孙付平, 李亚萍, 等. IGSO/GEO卫星对北斗系统导航性能的贡献分析[J]. 全球定位系统, 2016, 41(3): 16-20. [14] 马下平, 鲁尚强, 李秦政, 等. 北斗卫星导航系统的空间信号精度评估[J]. 测绘科学, 2019, 44(1): 90-97. [15] 王敬平, 姜鑫, 褚少鹤, 等. 北斗卫星导航系统定位精度研究[J]. 软件, 2019, 40(10): 152-154. DOI: 10.3969/j.issn.1003-6970.2019.10.034 [16] 魏钢, 高皓, 项宇. 北斗二号与北斗三号定位精度对比分析[J]. 导航定位学报, 2020, 8(2): 8-11. DOI: 10.3969/j.issn.2095-4999.2020.02.002 [17] HÉROUX P , KOUBA J. GPS precise point positioning using IGS orbit products[J]. Physics and chemismistry of the earth, part A: solid earth and geodesy, 2001, 26 (6-8): 573-578. DOI: 10.1016/S1464-1895(01)00103-X.
[18] SAASTAMOINEN J. Contributions to the theory of atmospheric refraction[J]. Bullet in geodesique, 1972, 105(1): 279-298. DOI: 10.1007/BF02521844.
[19] HOPFIELD H S. Tropospheric effect on electromagnetically measured range: prediction from surface weather data[J]. Radio science, 1971, 6(3): 357-367. DOI: 10.1029/RS006i003p00357.
[20] Copernicus Climate Change Service (C3S) (2017): ERA5: Fifth generation of ECMWF atmospheric reanalyses of the global climate[DS/OL]. [2020-06-07]. Copernicus Climate Change Service Climate Data Store (CDS), date of access. https://cds.climate.copernicus.eu/cdsapp#!/home.
[21] 吴仁攀, 曾琪, 虞顺. BDS-3数据质量评估及定位性能分析[C]//第十届中国卫星导航年会论文集-SOS空间基准与精密定位. 中科北斗汇(北京)科技有限公司会议论文集, 2019: 1-5. [22] 程军龙, 王旺, 马立烨, 等. 北斗三号观测数据质量及定位精度初步评估[J]. 测绘通报, 2019(8): 1-7. -
期刊类型引用(7)
1. 孙铭涵,庞治国,吕娟,张朋杰,崔香蕊. 地基BDS/GNSS水汽监测在水利领域的研究进展与展望. 全球定位系统. 2024(01): 19-33 .  本站查看
本站查看
2. 孙铭涵 ,庞治国 ,张朋杰 . 湖南省地基北斗卫星导航系统大气可降水量反演及降水分析. 中国防汛抗旱. 2024(04): 28-33 . 百度学术
3. 赵利江,赵健赟. 基于北斗三号和风云四号A星的大通“817”极端降雨特征分析. 全球定位系统. 2024(05): 65-72 . 本站查看
4. 朱晓武,段宏山,陈国恒,刘垒. 粤港澳大湾区多系统GNSS大气可降水量反演分析. 测绘通报. 2023(10): 163-167 . 百度学术
5. 郑志卿,张克非,李龙江,师嘉奇,张明浩. 基于MGEX站多系统GNSS反演大气可降水量精度评估. 全球定位系统. 2022(05): 100-110 . 本站查看
6. 姚欢欢,党亚民,许长辉,杨强,王虎. 不同气候类型北斗反演大气可降水量性能分析. 测绘科学. 2022(10): 21-28 . 百度学术
7. 安豪,严卫,杜晓勇,卞双双. GNSS大气海洋遥感技术研究进展. 全球定位系统. 2021(06): 1-10 . 本站查看
其他类型引用(8)















计量
- 文章访问数: 423
- HTML全文浏览量: 404
- PDF下载量: 35
- 被引次数: 15
