尊敬的读者、作者、审稿人, 关于本刊的投稿、审稿、编辑和出版的任何问题, 您可以本页添加留言。我们将尽快给您答复。谢谢您的支持!
1976创刊,双月刊
主办单位:中国电波传播研究所
主管单位:中国电子科技集团公司
ISSN 1008-9268
CN 41-1317/TN
因子图发展及其在定位与导航的应用技术
基于SIC的伪卫星系统抗远近效应捕获算法研究
基于接收机位置信息的GNSS干扰源定位技术
雾定位及其应用研究
卫星导航增强系统建设与发展
基于GLONASS频间偏差的GNSS时差监测方法研究
高精度测量系统的时间基准确定和相位校准方法研究
1 卫星导航增强系统建设与发展
2 遮挡环境下GPS/GLONASS/Galileo组合PPP性能分析
3 雾定位及其应用研究
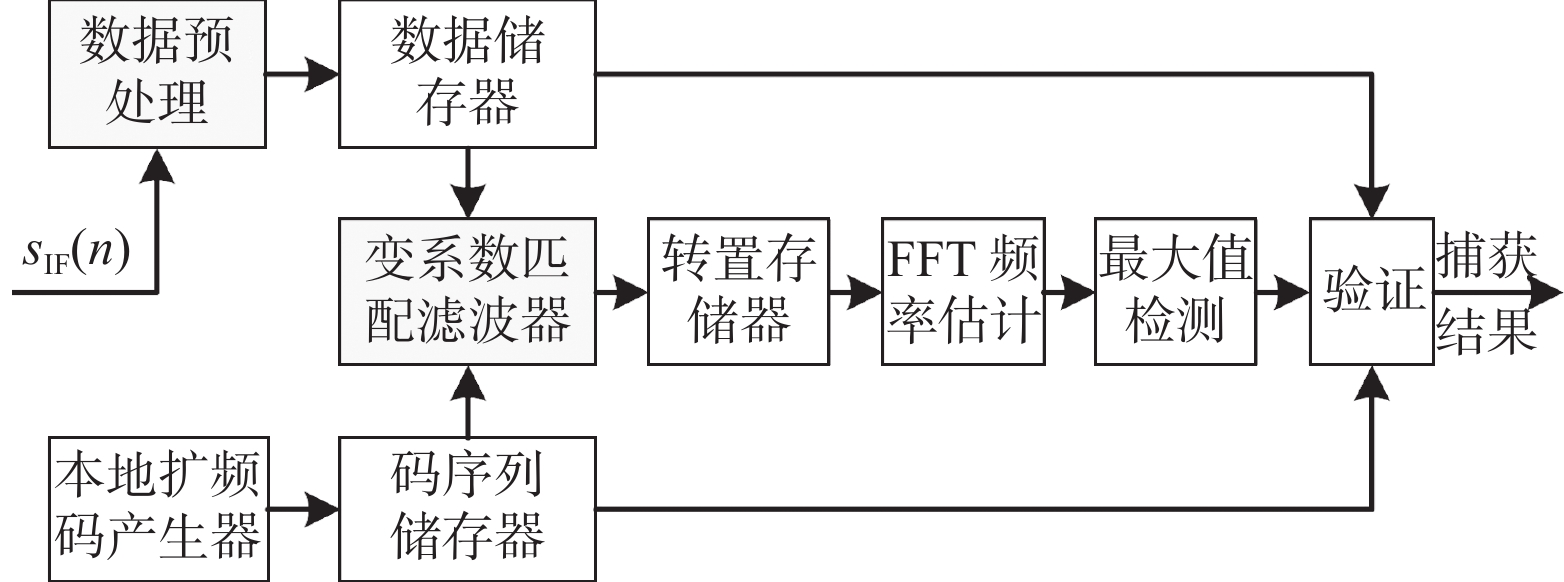
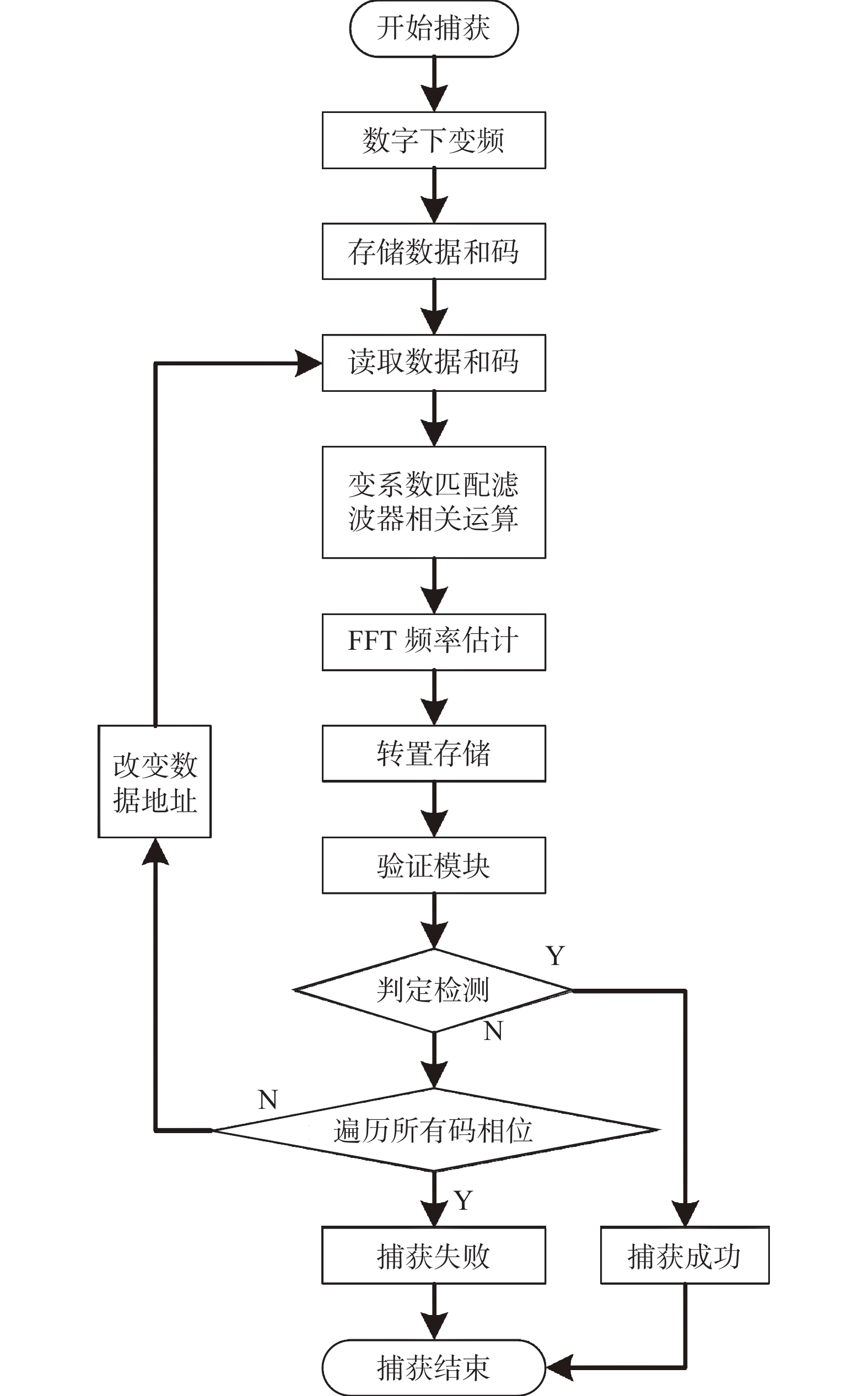
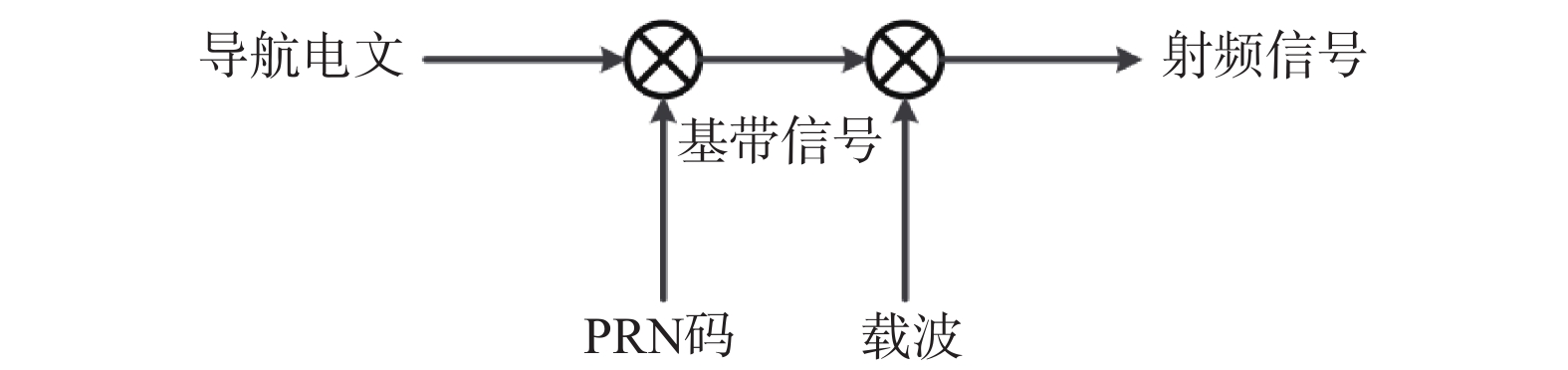
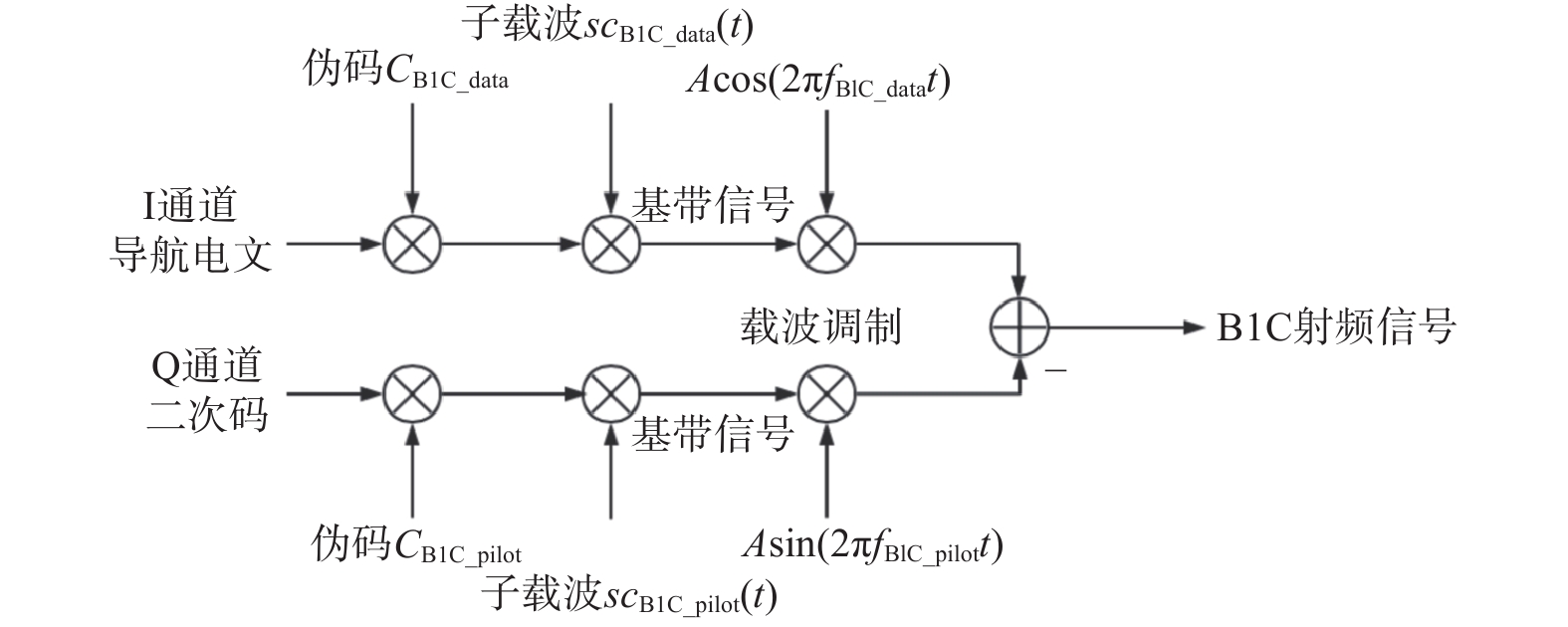
4 一种用于BDS-3接收机工程实现的两级B1C信号捕获技术
5 PPP/INS组合系统研究进展与展望
1 CORS实时正常高服务方法研究
2 水下导航定位技术综述
3 远区雷电定位粗差判别方法研究
4 卫星导航增强系统建设与发展
5 因子图发展及其在定位与导航的应用技术
总访问量
今日访问
最新公告
“GNSS遥感技术及应用”专栏征文通知
“GNSS守时与授时”专刊征文通知